Clear Sky Science · zh
机器学习驱动的工程纤毛设计使声学微型机器人实现混合操作
应对重大医学挑战的小小助手
医院越来越依赖能在体内深处工作的工具——那些手术刀和导管难以到达的地方。本文介绍了一种新型显微机器人,尺寸小于一粒沙子,在声波驱动下能温和地改变形状。通过将巧妙的设计、软质材料与机器学习相结合,研究人员展示了这种“回声机器人”(ECHObots)未来如何按需弯曲、扭转和变形,以在狭窄空间中导航、搅拌流体或在医疗和实验室环境中操纵微小物体。
从简单运动到智能形变
大多数现有微型机器人只能做直线运动或像微小螺旋桨一样旋转,这限制了它们在血管或组织等拥挤复杂环境中的功能。本文团队的目标是构建不仅能移动、而且能以可控方式改变形态的机器人——像一条能打开、关闭并指向不同方向的软臂。他们的方案是在由软塑料制成的柔性臂上附着小而似毛的结构,称为工程纤毛。当超声使这些纤毛振动时,它们搅动周围流体并产生使臂弯曲和扭转的力。该策略允许单个微型机器人仅通过调节声音就执行多种“混合”动作——从弯曲到旋转再到更复杂的形变。
教机器人听出正确的音符
一个关键挑战是每个微小结构对声音的响应高度依赖其精确的形状和尺寸。通过试错找到合适的几何形状将需要大量计算仿真和实验。为了解决这一问题,研究人员创建了一个自我改进的机器学习框架,学习机器人几何与其对声音的共振响应之间的联系。他们首先运行了一组有限但详细的物理仿真,测量不同纤毛形状的振动方式以及它们带动周围流体的强度。将这些结果用于训练随机森林模型——一种能够捕捉平滑趋势与突变的算法——以预测设计空间中许多新方案的共振频率和振动强度。
通过智能采样加速设计
团队并没有对每一种可能的设计都进行仿真,而是采用了自适应循环:机器学习模型先预测性能,然后映射其自身误差最大的区域,仅在这些困难区域新增仿真。经过几轮迭代后,模型对共振频率的预测通常在约2%以内,振动强度在约10%以内,相较于完整仿真。这一方法将计算时间缩短了十万倍以上,内存需求降低了二十多倍,同时仍能指导出有效的微型机器人设计。因此,研究人员能够快速找到在某一声频下向一个方向弯曲、在另一个声频下向相反方向弯曲的纤毛几何,或随着声强增加而旋转更快的设计。
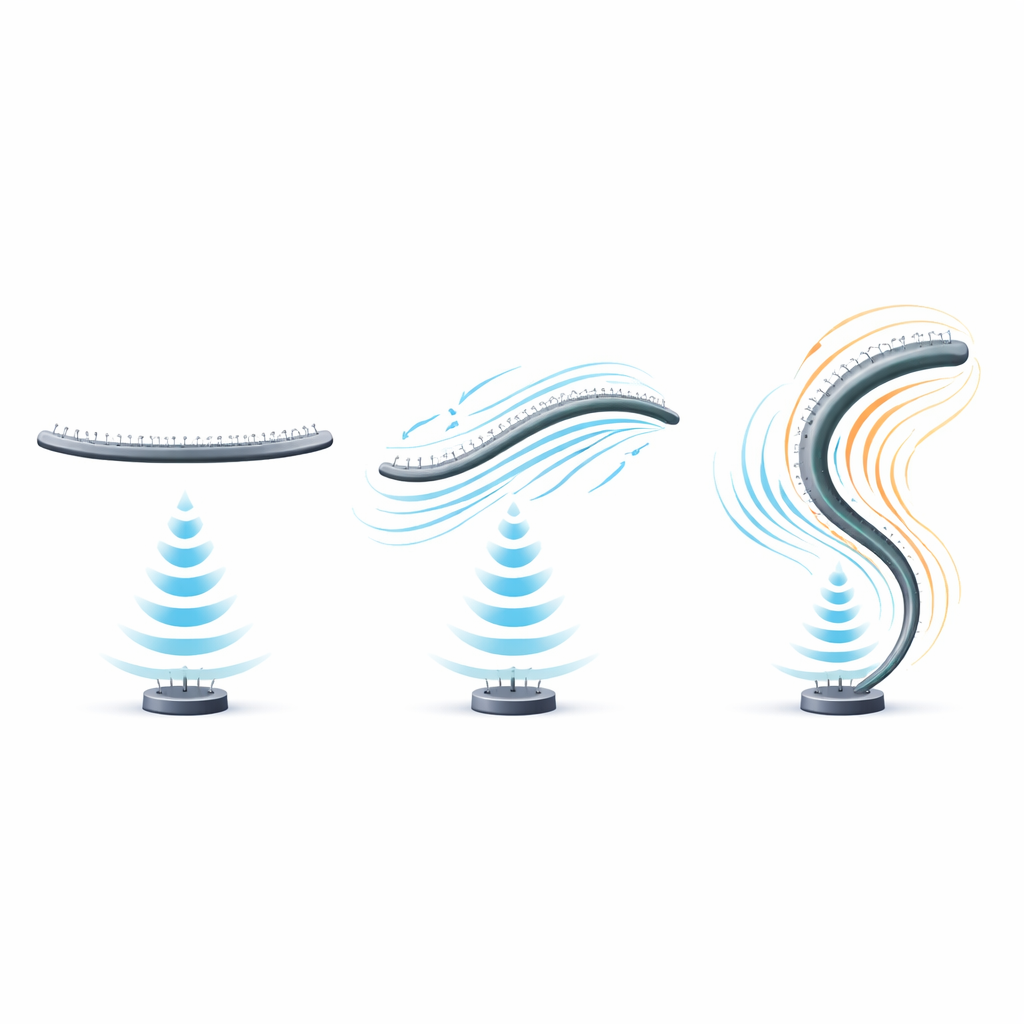
用于多种动作的软关节
为了赋予ECHObots更丰富的运动,团队借鉴了软体机器人和顺应性机构的理念——这些结构通过弯曲而非刚性铰接来工作。在一种策略中,他们沿臂略微调整材料刚度,创建更柔软的段落,这些段落更容易弯曲但仍能可靠复位。另一种策略则是将某些区域变窄,作为薄而灵活的铰链,在低功率下允许大幅弯曲,但代价是局部应力更高。利用这些构件,他们组装出更复杂的形态,例如在更强声场下旋转更快并向内卷曲的花瓣状转子、收缩成弧形壳的穹顶状阵列,以及能够反复打开、关闭与变形并在很大程度上回到原始形状的多节臂。
迈向自适应的微观工具
总体而言,该工作表明声驱动微型机器人可以被设计为以可编程、可逆且精确的方式改变形状,而不仅仅是位置移动。机器学习框架充当了快速的“设计罗盘”,指引工程师找到会对特定声频和声强做出期望响应的几何形状。软性结构和顺应性接头则提供了微观尺度上类生命运动的物理手段。未来,此类ECHObots可被定制用于诸如开启与关闭微小阀门、在芯片实验室设备中混合液体,或在体内温和操控颗粒与细胞等任务,为医学与微工程领域的智能、可适应微机器铺平道路。
引用: Ling, Y., Lu, Y., Rich, J. et al. Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots. Nat Commun 17, 3870 (2026). https://doi.org/10.1038/s41467-026-70048-4
关键词: 声学微型机器人, 软体机器人, 工程纤毛, 机器学习设计, 微尺度驱动