Clear Sky Science · tr
Sessiz dalgalarla çalışan tasarıma sahip yapay kirpikler sayesinde hibrit operasyonlar gerçekleştiren akustik mikrorobotlar
Büyük Tıbbi Sorunlar İçin Küçük Yardımcılar
Hastaneler, bistüri ve kateterlerin kolayca ulaşamadığı derin vücut bölgelerinde çalışabilecek aletlere giderek daha çok güveniyor. Bu makale, kum tanesinden daha küçük, ses dalgalarıyla sürüldüğünde nazikçe şeklini değiştirebilen yeni bir tür mikroskobik robotu tanıtıyor. Zeki tasarım, yumuşak malzemeler ve makine öğrenimini birleştirerek araştırmacılar, bu “ECHObot”ların bir gün dar boşluklarda gezinmek, sıvıları karıştırmak ya da tıbbi ve laboratuvar ortamlarında küçük nesneleri manipüle etmek için komutla bükülüp, dönüp ve şekil değiştirebileceğini gösteriyor.
Basit Hareketten Akıllı Şekil Değiştirmeye
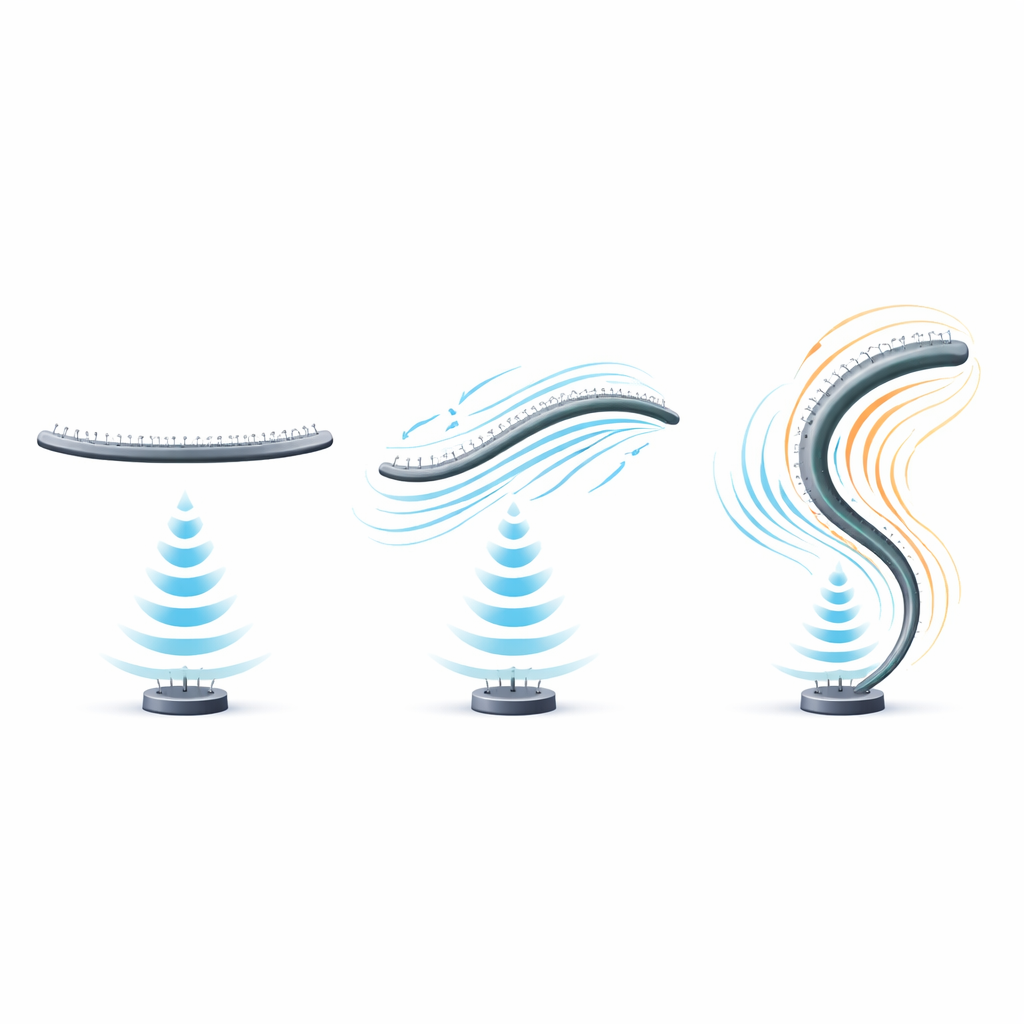
Mevcut mikrorobotların çoğu yalnızca düz çizgilerde hareket edebiliyor veya küçük pervaneler gibi dönebiliyor; bu da kan damarları veya doku gibi kalabalık, karmaşık ortamlarda yapabileceklerini sınırlandırıyor. Bu çalışmanın ekibi, sadece hareket edebilen değil, aynı zamanda kontrol edilebilir biçimlerde değişebilen robotlar yapmayı hedefledi—örneğin açılıp kapanabilen ve farklı yönlere işaret edebilen yumuşak bir kol gibi. Çözüm, esnek kolların üzerine küçük, saç benzeri yapılar olan tasarlanmış kirpikleri takmak oldu. Ultrason bu kirpikleri titreştirdiğinde çevreleyen sıvıyı karıştırıyor ve kolları büken ve döndüren kuvvetler oluşturuyor. Bu strateji, tek bir mikrorobotun sesi ayarlayarak bükülmeden dönmeye ve daha karmaşık morflamaya kadar birçok “hibrit” eylemi gerçekleştirmesini sağlıyor.
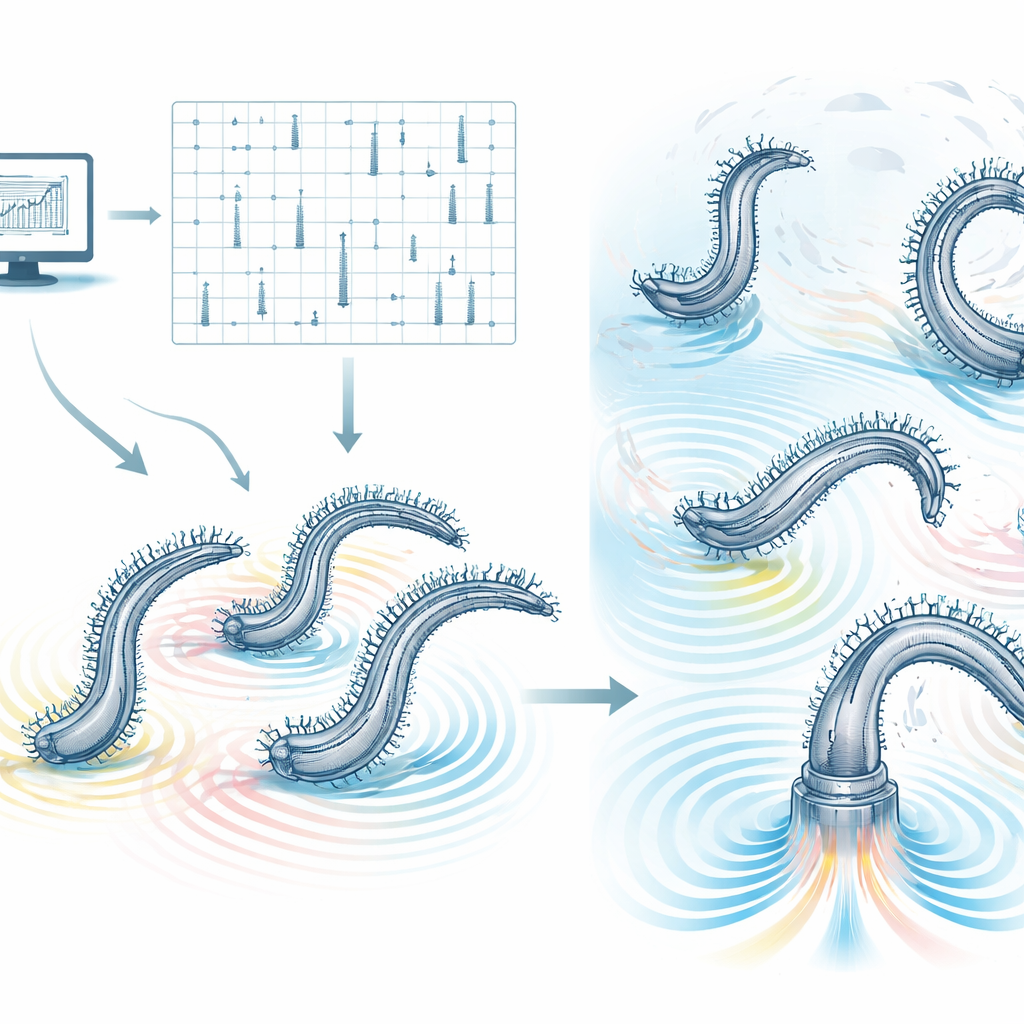
Robotlara Doğru Frekansları Dinlemeyi Öğretmek
Ana zorluk, her küçük yapının sese verdiği yanıtın tam şekli ve boyutuna hassas şekilde bağlı olmasıdır. Doğru geometrinin deneme-yanılma ile bulunması muazzam sayıda bilgisayar simülasyonu ve deney gerektirirdi. Bunu aşmak için araştırmacılar, bir robotun geometrisi ile sese verdiği rezonans yanıtı arasındaki bağı öğrenen kendi kendini geliştiren bir makine öğrenimi çerçevesi oluşturdu. Önce farklı kirpik şekillerinin nasıl titreştiğini ve çevreleyen sıvıyı ne kadar güçlü hareket ettirdiklerini ölçen sınırlı sayıda ayrıntılı fizik simülasyonu yaptılar. Bu sonuçlar, rezonans frekansını ve titreşim gücünü tasarım alanı boyunca birçok yeni tasarım için tahmin edebilen, hem yumuşak eğilimleri hem de keskin değişimleri yakalayabilen bir algoritma türü olan Random Forest modelini eğitti.
Akıllı Örneklemeyle Daha Hızlı Tasarım
Tüm olası tasarımları simüle etmek yerine ekip uyarlamalı bir döngü kullandı: makine öğrenimi modeli performansı tahmin ediyor, kendi hatalarının en büyük olduğu bölgeleri haritalıyor ve yeni simülasyonlar yalnızca o zor bölgelerde ekleniyor. Birkaç turdan sonra modelin rezonans frekansı tahminleri genellikle tam simülasyonlarla karşılaştırıldığında yaklaşık %2, titreşim gücünde ise yaklaşık %10 içinde oldu. Bu yaklaşım hesaplama süresini yüz binden fazla kat azalttı ve bellek ihtiyacını yirmiden fazla kat düşürdü; yine de etkili mikrorobotların tasarımını yönlendirdi. Sonuç olarak araştırmacılar, bir ses frekansında bir yönde bükülen ve başka bir frekansta ters yönde bükülen veya ses şiddeti arttıkça daha hızlı dönen kirpik geometrilerini hızla bulabildiler.
Birçok Hareket İçin Yumuşak Eklemeler
ECHObotlara daha zengin hareketler kazandırmak için ekip yumuşak robotik ve uyumlu mekanizmalar—sert mafsallar yerine esneyen yapılar—konusundaki fikirleri ödünç aldı. Bir stratejide, kollar boyunca malzeme sertliğini hafifçe değiştirdiler; daha kolay bükülen ancak yine de güvenilir şekilde eski haline dönebilen daha yumuşak segmentler oluşturdular. Bir diğerinde, belirli bölgeleri daraltarak düşük güçte büyük bükülmelere izin veren ince, esnek menteşeler gibi davranmalarını sağladılar; bunun maliyeti ise daha yüksek yerel gerilmeydi. Bu yapı taşlarını kullanarak, daha güçlü ses altında daha hızlı dönen ve içe doğru kıvrılan çiçek benzeri rotorlar, kavisli bir kabuğa doğru büzülen kubbe benzeri diziler ve açılıp kapanabilen, tekrar tekrar morf yapabilen ve orijinal şekline yakın şekilde dönebilen çok segmentli kollar gibi daha karmaşık şekiller bir araya getirildi.
Uyarlanabilir Mikroskobik Aletlere Doğru
Bir arada ele alındığında bu çalışma, sesle sürülen mikrorobotların yalnızca yer değiştirmek yerine programlanabilir, tersine çevrilebilir ve hassas yollarla şekil değiştirecek şekilde tasarlanabileceğini gösteriyor. Makine öğrenimi çerçevesi, mühendisleri belirli ses frekanslarına ve şiddetlerine istenen şekilde yanıt verecek geometrilere yönlendiren hızlı bir “tasarım pusulası” görevi görüyor. Yumuşak yapılar ve uyumlu eklemler, mikroskobik ölçeklerde canlı benzeri hareket için fiziksel araçları sağlıyor. Gelecekte bu tür ECHObotlar, küçük valfleri açıp kapama, çip üzeri laboratuvar cihazlarında sıvıları karıştırma veya vücut içinde parçacıklar ve hücreleri nazikçe manipüle etme gibi görevlere göre özelleştirilerek tıp ve mikro-mühendislik için akıllı, uyarlanabilir mikromakinelere giden bir yol açabilir.
Atıf: Ling, Y., Lu, Y., Rich, J. et al. Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots. Nat Commun 17, 3870 (2026). https://doi.org/10.1038/s41467-026-70048-4
Anahtar kelimeler: akustik mikrorobotlar, yumuşak robotik, tasarlanmış kirpikler, makine öğrenimi tasarımı, mikro ölçekli aktüasyon