Clear Sky Science · sv
Maskininlärningsstyrd design av konstruerade cilier möjliggör hybrida funktioner i akustiska mikrorobotar
Små hjälpare för stora medicinska utmaningar
Sjukhus förlitar sig i allt högre grad på verktyg som kan arbeta djupt inne i kroppen, där skalpeller och katetrar har svårt att nå. Denna artikel introducerar en ny typ av mikroskopisk robot, mindre än ett sandkorn, som mjukt kan ändra form när den drivs av ljudvågor. Genom att kombinera smart design, mjuka material och maskininlärning visar forskarna hur dessa ”ECHObots” en dag skulle kunna böja, vrida och forma sig på kommando för att navigera trånga utrymmen, röra om vätskor eller manipulera små föremål i medicinska och laboratoriemiljöer.
Från enkel rörelse till smart formförändring
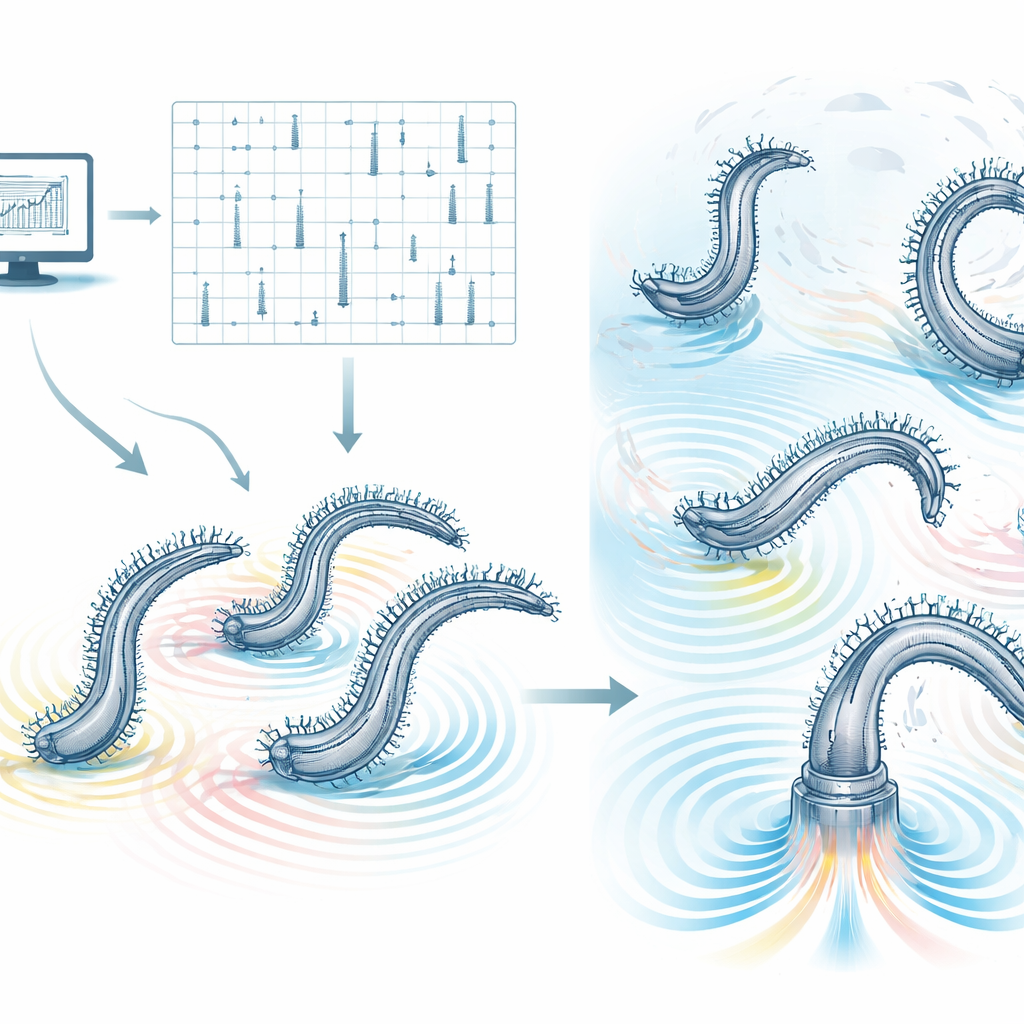
De flesta befintliga mikrorobotar kan bara förflytta sig rakt fram eller snurra som små propellrar, vilket begränsar vad de kan göra i trånga, komplexa miljöer som blodkärl eller vävnad. Teamet bakom detta arbete satte sig för att bygga robotar som inte bara kan röra sig, utan också ändra sin form på kontrollerade sätt—som en mjuk arm som kan öppna, stänga och peka i olika riktningar. Deras lösning är att fästa små hårliknande strukturer, kallade konstruerade cilier, på flexibla armar gjorda av en mjuk plast. När ultraljud får dessa cilier att vibrera rör de om i den omgivande vätskan och skapar krafter som böjer och vrider armarna. Denna strategi gör att en enda mikrorobot kan utföra flera ”hybrida” handlingar—från böjning till rotation till mer avancerad formning—endast genom att justera ljudet.
Att lära robotarna att lyssna på rätt toner
Ett centralt problem är att varje liten struktur reagerar på ljud på ett sätt som är mycket känsligt för dess exakta form och storlek. Att hitta rätt geometri genom trial and error skulle kräva ett enormt antal datorbaserade simuleringar och experiment. För att övervinna detta skapade forskarna ett självinstruerande maskininlärningsramverk som lär sig sambandet mellan en robots geometri och dess resonanssvar för ljud. De körde först ett begränsat antal detaljerade fysiksimuleringar för att mäta hur olika cilieformer vibrerar och hur starkt de påverkar den omgivande vätskan. Dessa resultat tränade en Random Forest-modell—en typ av algoritm som kan fånga både mjuka trender och skarpa förändringar—för att förutsäga resonansfrekvens och vibrationsstyrka för många nya designer över designutrymmet.
Snabbare design med smart sampling
I stället för att simulera varje möjlig design använde teamet en adaptiv loop: maskininlärningsmodellen förutspår prestanda, kartlägger var dess egna fel är största, och nya simuleringar läggs bara till i de svåra regionerna. Efter flera rundor låg modellens förutsägelser för resonansfrekvens typiskt inom cirka 2 %, och vibrationsstyrka inom cirka 10 %, jämfört med fullständiga simuleringar. Detta tillvägagångssätt minskade beräkningstiden med mer än hundratusen gånger och sänkte minnesbehoven med över tjugo gånger, samtidigt som det fortfarande vägledde designen av effektiva mikrorobotar. Som ett resultat kunde forskarna snabbt hitta ciliegeometrier som böjer åt ena hållet vid en ljudfrekvens och åt motsatt håll vid en annan, eller som roterar snabbare när ljudintensiteten ökar.
Mjuka leder för många olika rörelser
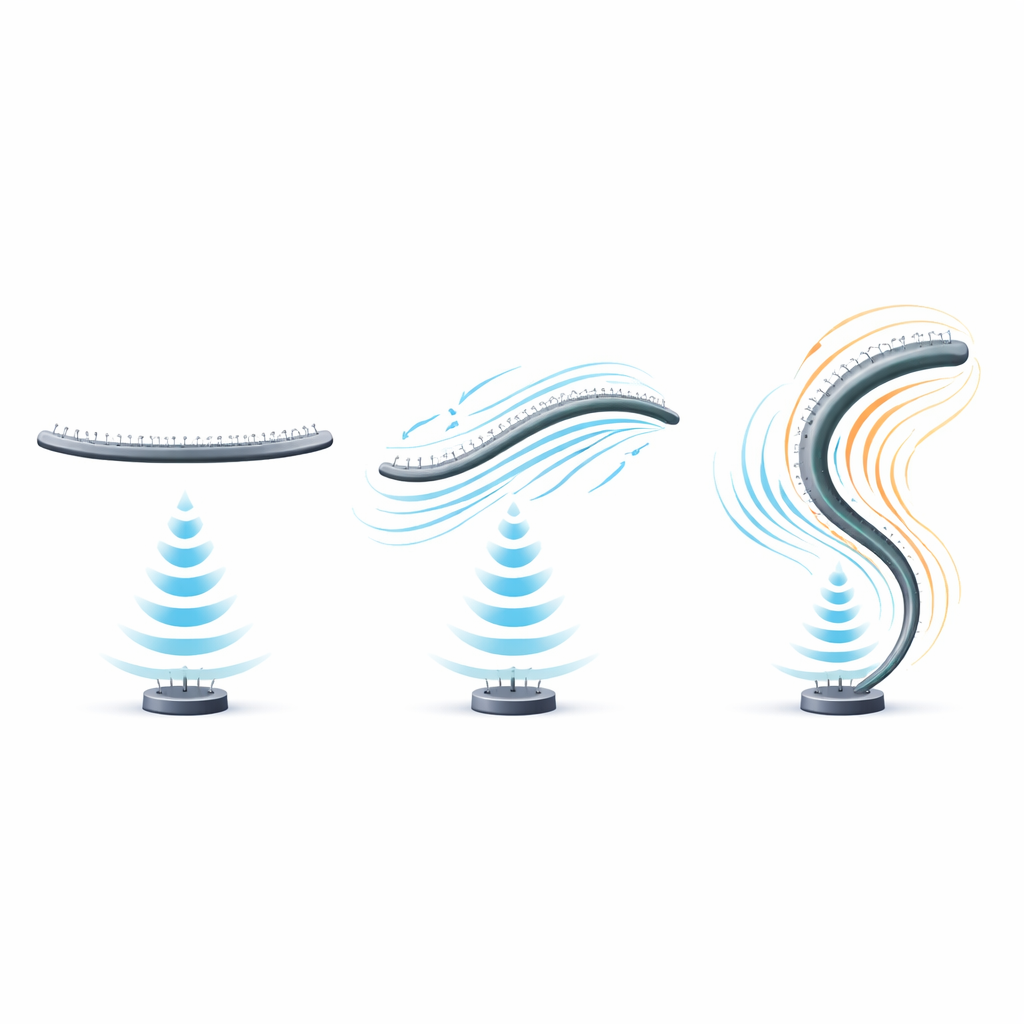
För att ge ECHObots ännu rikare rörelsemönster lånade teamet idéer från mjukrobotik och komplianta mekanismer—strukturer som flexar snarare än att röra sig på styva gångjärn. I en strategi modifierade de materialets styvhet längs armarna, och skapade mjukare segment som böjer sig lättare men fortfarande återhämtar sig pålitligt. I en annan smalnade de av vissa områden för att fungera som tunna, flexibla gångjärn som tillåter stora böjningar vid låg effekt, på bekostnad av högre lokal spänning. Med dessa byggstenar satte de ihop mer komplexa former som blomliknande rotorer som snurrar snabbare och krullar in sig under starkare ljud, kupoliknande matriser som drar ihop sig till ett kurvat skal, och flersegmenterade armar som kan öppna, stänga och omforma sig upprepade gånger samtidigt som de återvänder nära sina ursprungliga former.
Mot adaptiva mikroskopiska verktyg
Sammantaget visar detta arbete att ljuddrivna mikrorobotar kan designas för att ändra form på programmerbara, reversibla och precisa sätt, snarare än att endast förflytta sig. Maskininlärningsramverket fungerar som en snabb ”designkompass” som pekar ingenjörer mot geometrier som kommer att reagera som önskat på specifika ljudfrekvenser och -styrkor. De mjuka strukturerna och de komplianta lederna ger de fysiska medlen för livlika rörelser i mikroskala. I framtiden skulle sådana ECHObots kunna anpassas för uppgifter som att öppna och stänga små ventiler, blanda vätskor i lab-on-a-chip-enheter eller försiktigt manipulera partiklar och celler inne i kroppen, vilket öppnar en väg mot smarta, anpassningsbara mikromaskiner för medicin och mikroengineering.
Citering: Ling, Y., Lu, Y., Rich, J. et al. Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots. Nat Commun 17, 3870 (2026). https://doi.org/10.1038/s41467-026-70048-4
Nyckelord: akustiska mikrorobotar, mjukrobotik, konstruerade cilier, maskininlärningsdesign, mikroskala-aktivering