Clear Sky Science · pt
Projeto orientado por aprendizado de máquina de cílios projetados permite operações híbridas em microrrobôs acústicos
Pequenos ajudantes para grandes desafios médicos
Hospitais dependem cada vez mais de ferramentas que podem atuar profundamente no corpo, onde bisturis e cateteres não chegam facilmente. Este artigo apresenta um novo tipo de robô microscópico, menor que um grão de areia, que pode mudar de forma suavemente quando acionado por ondas sonoras. Ao combinar projeto inteligente, materiais macios e aprendizado de máquina, os pesquisadores mostram como esses “ECHObots” poderão um dia dobrar, torcer e se transformar sob comando para navegar por espaços apertados, agitar fluidos ou manipular objetos minúsculos em contextos médicos e laboratoriais.
De movimentos simples a metamorfoses inteligentes
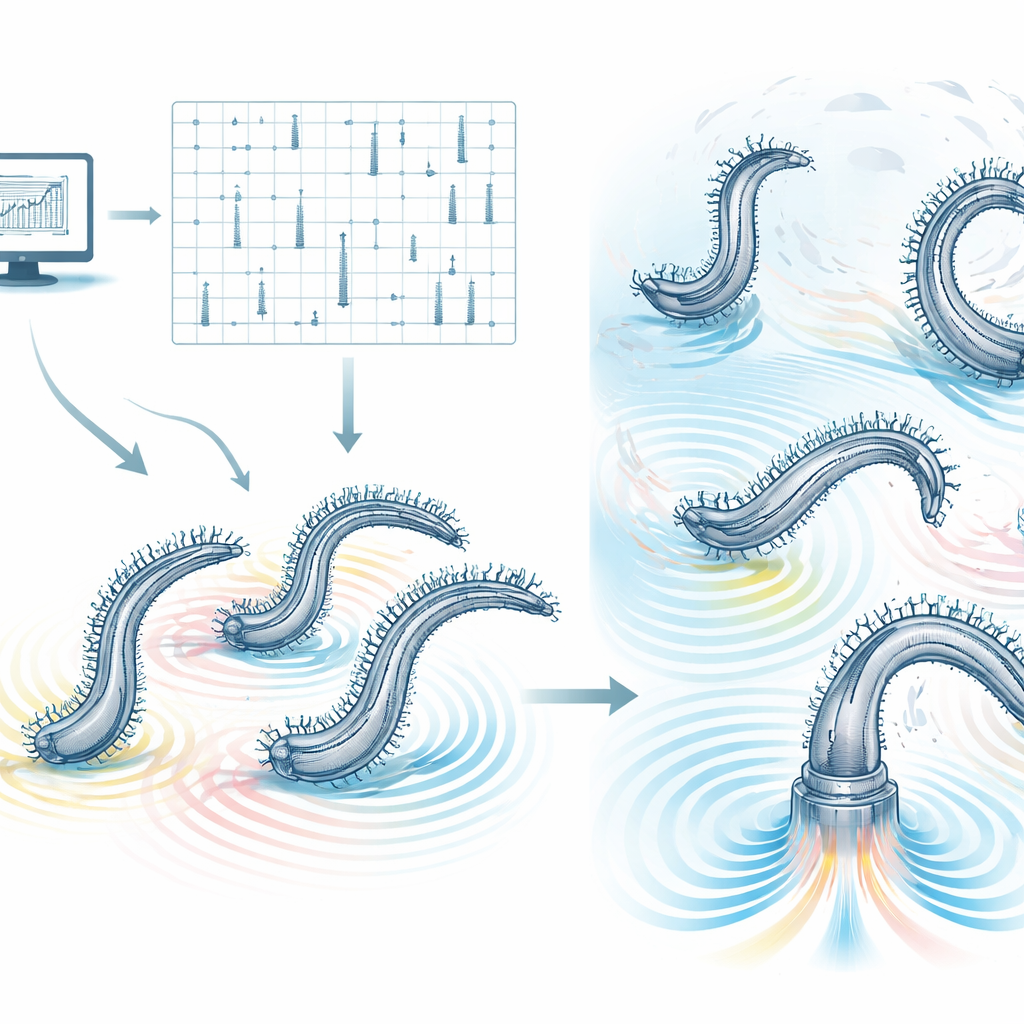
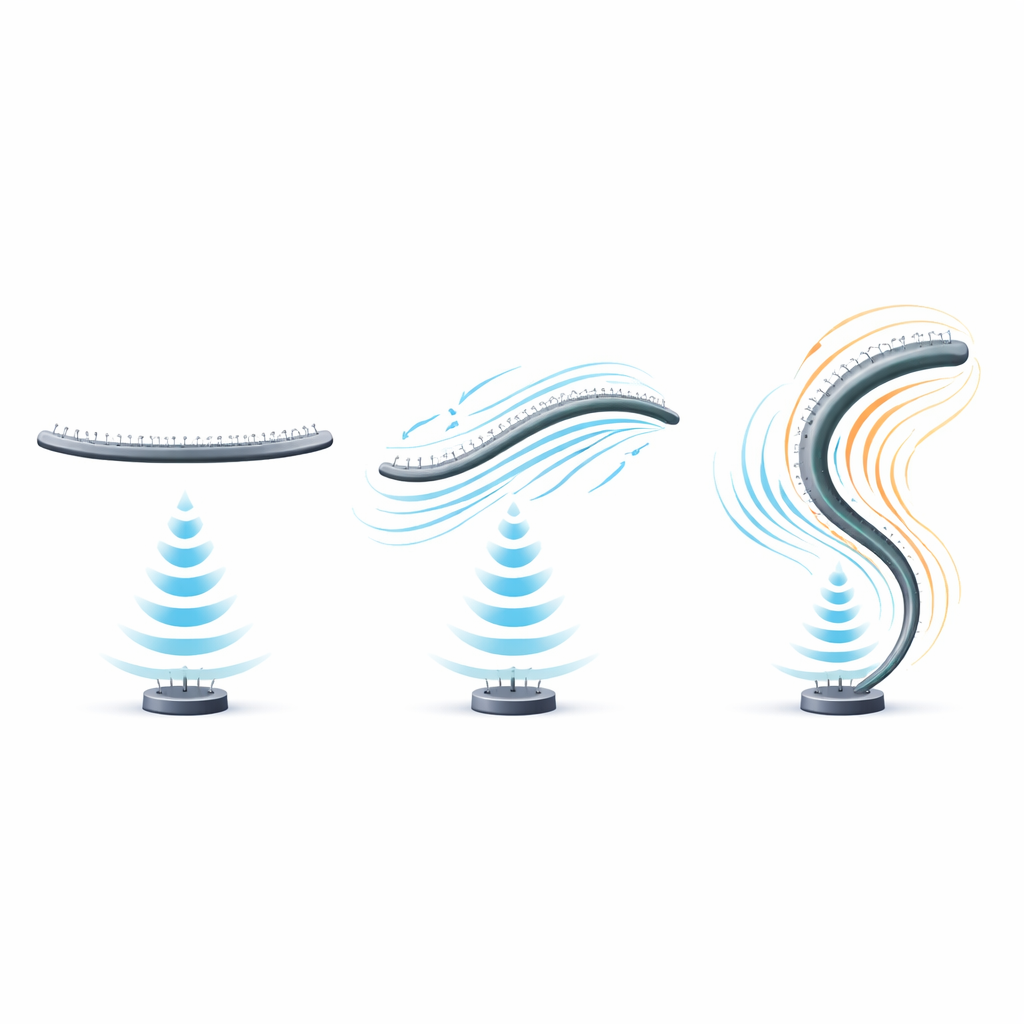
A maioria dos microrrobôs existentes só consegue se mover em linhas retas ou girar como pequenas hélices, o que limita suas capacidades em ambientes congestionados e complexos, como vasos sanguíneos ou tecidos. A equipe por trás deste trabalho procurou construir robôs que não apenas se locomovessem, mas também mudassem de forma de maneiras controladas — como um braço macio que pode abrir, fechar e apontar em direções diferentes. A solução foi anexar pequenas estruturas semelhantes a pelos, chamadas cílios projetados, a braços flexíveis feitos de um plástico macio. Quando ultrassom faz esses cílios vibrar, eles agitam o fluido ao redor e geram forças que dobram e torcem os braços. Essa estratégia permite que um único microrrobô realize múltiplas ações “híbridas” — desde curvar até rotacionar e executar morfologias mais elaboradas — simplesmente ajustando o som.
Ensinando robôs a ouvir as notas certas
Um desafio central é que a resposta de cada minúscula estrutura ao som depende sensivelmente da sua forma e tamanho exatos. Encontrar a geometria certa por tentativa e erro exigiria um número enorme de simulações e experimentos. Para contornar isso, os pesquisadores criaram uma estrutura de aprendizado de máquina autoaperfeiçoável que aprende a relação entre a geometria do robô e sua resposta ressonante ao som. Primeiro, eles executaram um conjunto limitado de simulações físicas detalhadas para medir como diferentes formas de cílios vibram e com que intensidade movimentam o fluido circundante. Esses resultados treinaram um modelo Random Forest — um tipo de algoritmo capaz de capturar tanto tendências suaves quanto mudanças abruptas — para prever a frequência de ressonância e a intensidade de vibração para muitos novos projetos ao longo do espaço de projeto.
Projeto mais rápido com amostragem inteligente
Em vez de simular todo projeto possível, a equipe usou um ciclo adaptativo: o modelo de aprendizado de máquina prevê o desempenho, depois mapeia onde seus próprios erros são maiores, e novas simulações são adicionadas apenas nessas regiões difíceis. Após várias rodadas, as previsões do modelo para a frequência de ressonância ficaram tipicamente dentro de cerca de 2%, e a intensidade de vibração dentro de cerca de 10%, em comparação com simulações completas. Essa abordagem reduziu o tempo computacional em mais de cem mil vezes e cortou as necessidades de memória por mais de vinte vezes, enquanto ainda orientava o projeto de microrrobôs eficazes. Como resultado, os pesquisadores puderam rapidamente encontrar geometrias de cílios que se dobram em uma direção a uma certa frequência sonora e na direção oposta em outra, ou que rotacionam mais rapidamente à medida que a intensidade do som aumenta.
Juntas macias para muitos movimentos diferentes
Para dar aos ECHObots movimentos ainda mais ricos, a equipe recorreu a ideias da robótica macia e de mecanismos compliantes — estruturas que flexionam em vez de articular-se em juntas rígidas. Em uma estratégia, modificaram levemente a rigidez do material ao longo dos braços, criando segmentos mais macios que se curvam mais facilmente mas ainda se recuperam de forma confiável. Em outra, estreitaram certas regiões para agir como dobradiças finas e flexíveis que permitem grandes dobras com baixa energia, ao custo de maior tensão local. Usando esses blocos de construção, montaram formas mais complexas como rotores em forma de flor que giram mais rápido e se enrolam para dentro sob som mais forte, arranjos em forma de cúpula que se contraem em uma casca curva, e braços segmentados que podem abrir, fechar e se transformar repetidamente enquanto retornam próximos às suas formas originais.
Rumo a ferramentas microscópicas adaptativas
Em conjunto, este trabalho demonstra que microrrobôs acionados por som podem ser projetados para mudar de forma de maneiras programáveis, reversíveis e precisas, em vez de apenas se deslocarem no espaço. A estrutura de aprendizado de máquina atua como uma “bússola de projeto” rápida, apontando engenheiros para geometrias que responderão conforme desejado a frequências e intensidades sonoras específicas. As estruturas macias e as juntas compliantes fornecem os meios físicos para movimentos semelhantes aos vivos em escalas microscópicas. No futuro, tais ECHObots poderiam ser adaptados para tarefas como abrir e fechar válvulas minúsculas, misturar fluidos em dispositivos lab-on-a-chip ou manipular gentilmente partículas e células dentro do corpo, abrindo caminho para micromáquinas inteligentes e adaptáveis para medicina e microengenharia.
Citação: Ling, Y., Lu, Y., Rich, J. et al. Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots. Nat Commun 17, 3870 (2026). https://doi.org/10.1038/s41467-026-70048-4
Palavras-chave: microrrobôs acústicos, robótica macia, cílios projetados, projeto por aprendizado de máquina, acionamento em escala micrométrica