Clear Sky Science · ja
機械学習駆動の人工繊毛設計によりハイブリッド動作を可能にする音響マイクロロボット
大きな医療課題に応える小さな助手たち
病院では、メスやカテーテルが容易に到達できない体内深部で働ける道具への依存が高まっています。本稿は、砂粒よりも小さな新しいタイプの微小ロボットを紹介します。これは音波で駆動されると優しく形を変えることができます。巧妙な設計、柔らかい材料、そして機械学習を組み合わせることで、研究者たちはこの「ECHObot」が将来的に曲がったり、ねじれたり、指令に応じて変形して狭い空間を進んだり、流体を攪拌したり、医療や実験室の場面で微小物体を操作したりできる可能性を示しています。
単純な運動から賢い形状変化へ
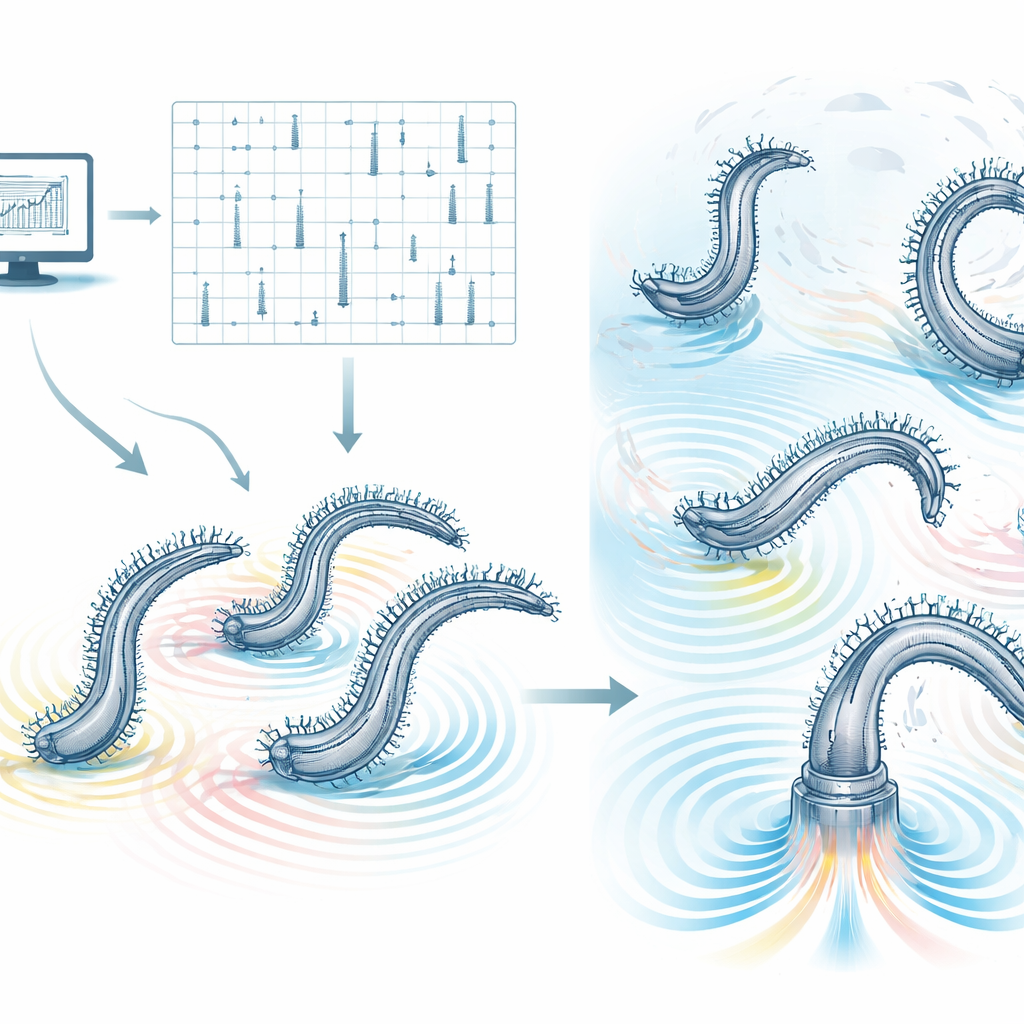
既存の多くのマイクロロボットは直線的にしか動けないか、小さなプロペラのように回転するだけで、血管や組織のような混雑した複雑な環境ではできることが限られます。本研究チームは、移動するだけでなく、制御された方法で形を変えられるロボット、例えば開閉や指向を変えられる柔らかいアームのようなものを作ることを目指しました。彼らの解は、柔らかいプラスチックで作られた柔軟なアームに小さな毛のような構造(人工繊毛)を取り付けることです。超音波がこれらの繊毛を振動させると、周囲の流体を攪拌してアームを曲げたりねじったりする力を生み出します。この戦略により、単一のマイクロロボットが音を調整するだけで曲げ、回転、より複雑な形状変化といった複数の“ハイブリッド”動作を実行できます。
ロボットに正しい音を聞かせる学習
重要な課題は、各微細構造が音にどう反応するかはその正確な形状や大きさに敏感に依存することです。試行錯誤で適切な形状を見つけるには膨大な数のコンピュータシミュレーションと実験が必要になります。これを克服するために研究者たちは、ロボットの幾何と音に対する共振応答との関係を学習する自己改善型の機械学習フレームワークを作成しました。まず限られた数の詳細な物理シミュレーションを実行して、異なる繊毛形状がどのように振動し、周囲の流体をどれほど動かすかを測定しました。これらの結果は、滑らかな傾向と急激な変化の両方を捉えられるランダムフォレストモデル(Random Forest)を訓練するために用いられ、多数の新しい設計に対して共振周波数と振動強度を予測できるようにしました。
賢いサンプリングで設計を高速化
すべての可能な設計をシミュレートする代わりに、チームは適応ループを使いました。機械学習モデルが性能を予測し、自身の誤差が最も大きい領域を示し、その難しい領域にのみ新しいシミュレーションを追加します。数ラウンドの後、モデルの共振周波数の予測は通常約2%以内、振動強度は約10%以内でフルシミュレーションと一致しました。この手法により計算時間は十万倍以上短縮され、メモリ需要も20倍以上削減されつつ、有効なマイクロロボット設計の指針を得られました。その結果、研究者らはある音の周波数では一方向に曲がり、別の周波数では逆方向に曲がる繊毛形状や、音強度が増すと回転が速くなるデザインを迅速に見つけることができました。
多様な動作を可能にする柔らかい関節
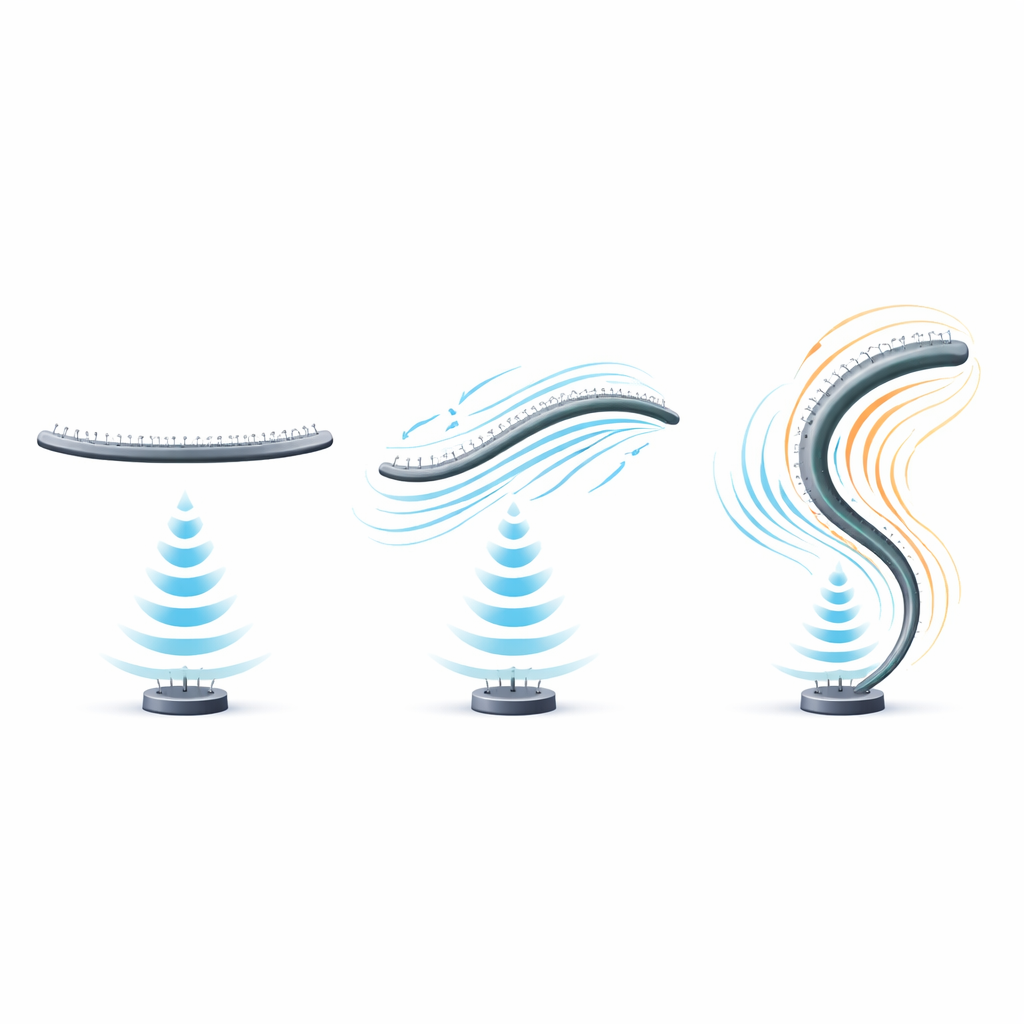
ECHObotにさらに豊かな動作を与えるため、チームはソフトロボティクスやコンプライアント機構(剛体のヒンジではなく曲がる構造)からアイデアを借用しました。一つの戦略では、アームに沿って材料の剛性をわずかに変え、より曲がりやすくそれでも確実に戻る柔らかい区間を作りました。別の戦略では特定の領域を狭くして薄く柔軟なヒンジとして機能させ、低出力で大きな曲げを可能にする代わりに局所的な応力は高くなります。これらの基本要素を用いて、強い音でより速く回転し内側に巻き込む花のようなローター、収縮して湾曲した殻になるドーム状の配列、開閉や繰り返し変形しつつほぼ元の形状に戻る多節アームなど、より複雑な形状を組み立てました。
適応する微小ツールに向けて
総じて、この研究は音で駆動されるマイクロロボットが単に位置を移動するだけでなく、プログラム可能で可逆的かつ精密な方法で形を変えるよう設計できることを示しています。機械学習フレームワークは、高速な「設計の羅針盤」として機能し、特定の周波数や強さの音に対して望ましい応答を示す幾何をエンジニアに示します。柔らかい構造とコンプライアントな関節は、微小スケールで生体のような動きを実現する物理的手段を提供します。将来的には、こうしたECHObotは微小バルブの開閉、ラボオンチップ装置内での流体混合、体内での粒子や細胞の優しい操作などの作業に合わせて調整され、医療やマイクロエンジニアリングに向けた賢く適応可能な微小機械への道を開く可能性があります。
引用: Ling, Y., Lu, Y., Rich, J. et al. Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots. Nat Commun 17, 3870 (2026). https://doi.org/10.1038/s41467-026-70048-4
キーワード: 音響マイクロロボット, ソフトロボティクス, 人工繊毛, 機械学習設計, マイクロスケール作動