Clear Sky Science · ru
Проектирование управляемых машинным обучением искусственных ресничек позволяет гибридные операции в акустических микророботах
Крошечные помощники для больших медицинских задач
Больницы все в большей степени полагаются на инструменты, способные работать глубоко в теле, там, где скальпели и катетеры добраться непросто. В этой статье представлен новый тип микроскопического робота, меньше зерна песка, который может мягко менять форму под воздействием звуковых волн. Сочетая продуманную конструкцию, мягкие материалы и машинное обучение, исследователи показывают, как эти «ECHObot» однажды смогут сгибаться, скручиваться и трансформироваться по команде, чтобы проходить через узкие пространства, перемешивать жидкости или манипулировать крошечными объектами в медицинских и лабораторных условиях.
От простого движения к умной смене формы
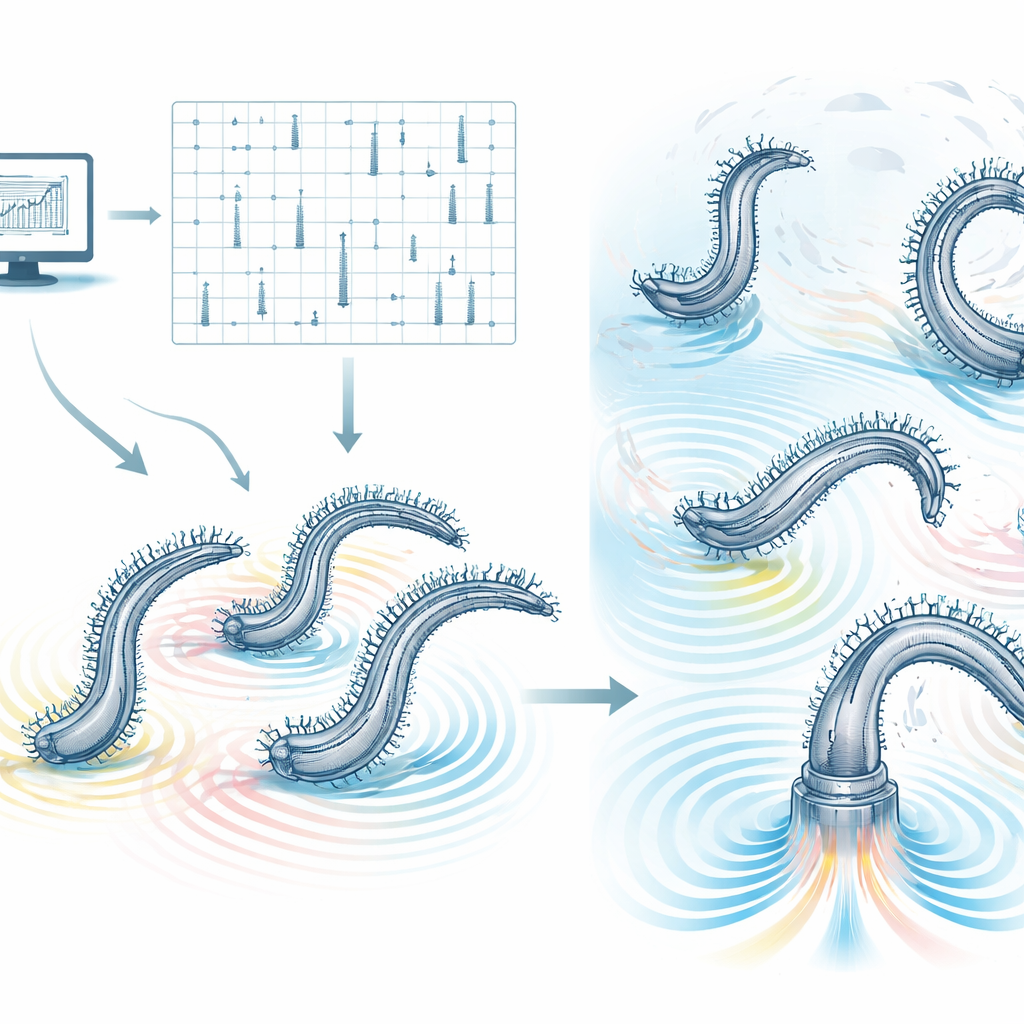
Большинство существующих микророботов умеют либо двигаться по прямой, либо вращаться как крошечные пропеллеры, что ограничивает их возможности в плотных и сложных средах, например в кровеносных сосудах или тканях. Авторы работы поставили цель создать роботов, которые не только перемещаются, но и контролируемо меняют форму — как мягкая рука, способная открываться, закрываться и указывать в разные стороны. Их решение — прикреплять к гибким «рукам» из мягкого пластика небольшие волосковидные структуры, называемые искусственными ресничками. Когда ультразвук заставляет реснички вибрировать, они перемешивают окружающую жидкость и создают силы, которые сгибают и скручивают балки. Эта стратегия позволяет одному микророботу выполнять несколько «гибридных» действий — от сгибания до вращения и более сложных морфингов — просто изменяя звуковой сигнал.
Обучая роботов слушать нужные ноты
Ключевая проблема в том, что реакция каждой крошечной структуры на звук сильно зависит от её точной формы и размеров. Искать подходящую геометрию методом проб и ошибок потребовало бы огромного числа физических моделирований и экспериментов. Чтобы это преодолеть, исследователи создали самообучающуюся систему машинного обучения, которая выстраивает связь между геометрией робота и его резонансной реакцией на звук. Сначала они провели ограниченное число подробных физических симуляций, чтобы измерить, как вибрируют разные формы ресничек и насколько сильно они воздействуют на окружающую жидкость. На этих данных была обучена модель Random Forest — тип алгоритма, способный улавливать как плавные зависимости, так и резкие переходы — для предсказания резонансной частоты и силы вибрации для многих новых конструкций в пространстве параметров.
Более быстрое проектирование с умной выборкой
Вместо симуляции каждой возможной конструкции команда использовала адаптивный цикл: модель машинного обучения предсказывает характеристики, затем оценивает, где её собственные ошибки наибольшие, и новые симуляции добавляют только в эти сложные регионы. Через несколько итераций предсказания модели для резонансной частоты обычно укладывались примерно в 2%, а для силы вибрации — в около 10% по сравнению с полными симуляциями. Такой подход сократил вычислительное время более чем в сто тысяч раз и уменьшил требования к памяти более чем в двадцать раз, при этом всё ещё эффективно направляя проектирование микророботов. В результате исследователи быстро находили геометрии ресничек, которые изгибаются в одном направлении при одной частоте звука и в противоположном при другой, или которые вращаются быстрее по мере увеличения интенсивности звука.
Мягкие шарниры для множества движений
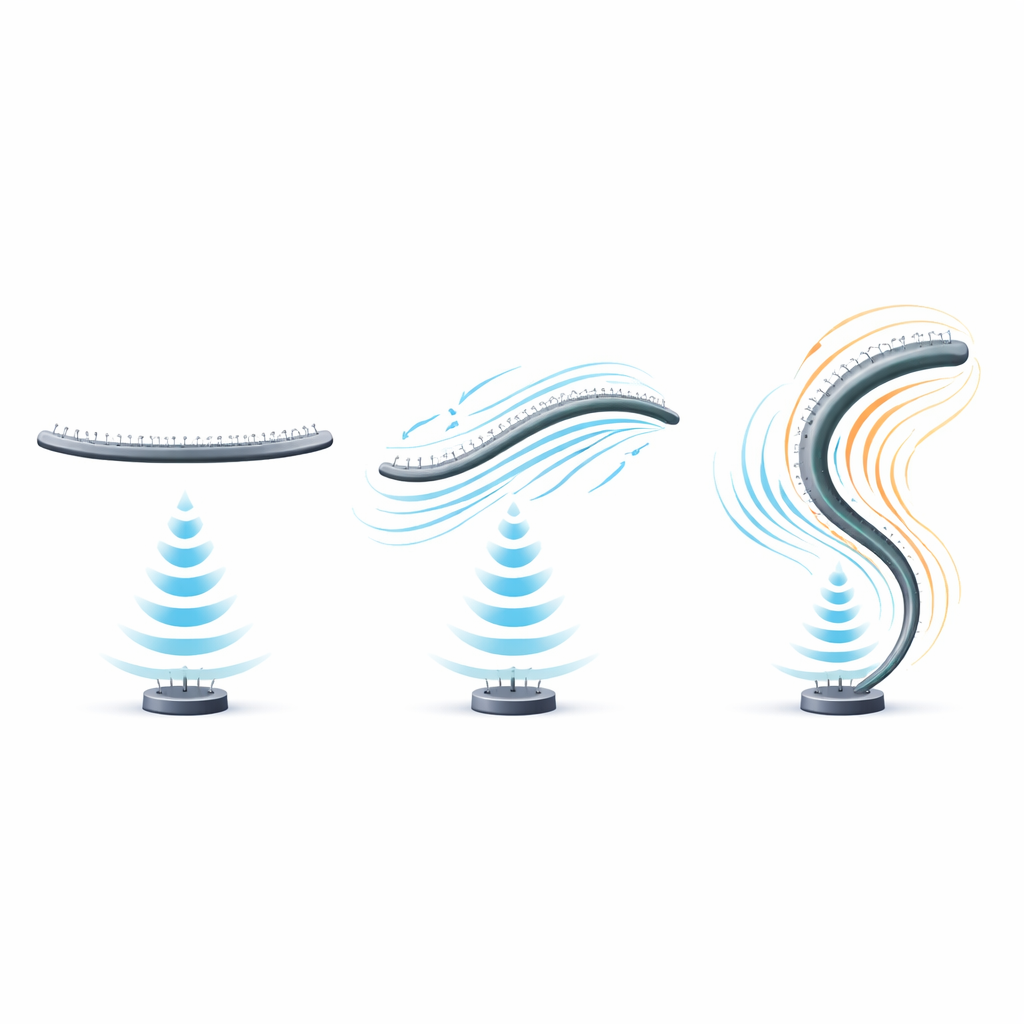
Чтобы придать ECHObot более богатую подвижность, команда заимствовала идеи из мягкой робототехники и комплаентных механизмов — конструкций, которые гнутся, а не шарнируются на жестких сочленениях. В одном подходе они немного изменяли жёсткость материала вдоль «рук», создавая более мягкие сегменты, которые легче сгибаются, но всё ещё надежно восстанавливаются. В другом случае они сужали определённые участки, чтобы те действовали как тонкие гибкие петли, позволяющие сильные изгибы при низкой мощности, ценой более высокого локального напряжения. Используя эти строительные блоки, они собирали более сложные формы — например, роторы, напоминающие цветок, которые быстрее вращаются и заворачиваются внутрь при усилении звука, куполообразные массивы, сокращающиеся в кривую оболочку, и многосегментные «руки», которые могут многократно открываться, закрываться и меняться, почти возвращаясь к исходной форме.
К микроскопическим адаптивным инструментам
В совокупности работа показывает, что микророботы, управляемые звуком, могут быть спроектированы так, чтобы программируемо, обратимо и с высокой точностью менять форму, а не только перемещаться в пространстве. Рамка машинного обучения действует как быстрый «компас проектирования», указывающий инженерам на геометрии, которые будут реагировать желаемым образом на конкретные частоты и интенсивности звука. Мягкие структуры и комплаентные суставы дают физические средства для подобной живой подвижности на микромасштабе. В будущем такие ECHObot могут быть адаптированы под задачи вроде открытия и закрытия крошечных клапанов, перемешивания жидкостей в лабораторных микросхемах или аккуратной манипуляции частицами и клетками внутри организма, открывая путь к интеллектуальным, адаптивным микромашинам для медицины и микроинжиниринга.
Цитирование: Ling, Y., Lu, Y., Rich, J. et al. Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots. Nat Commun 17, 3870 (2026). https://doi.org/10.1038/s41467-026-70048-4
Ключевые слова: акустические микророботы, мягкая робототехника, искусственные реснички, проектирование с помощью машинного обучения, микроактуация