Clear Sky Science · en
Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots
Tiny Helpers for Big Medical Challenges
Hospitals increasingly rely on tools that can work deep inside the body, where scalpels and catheters cannot easily reach. This paper introduces a new kind of microscopic robot, smaller than a grain of sand, that can gently change its shape when driven by sound waves. By combining clever design, soft materials, and machine learning, the researchers show how these “ECHObots” could one day bend, twist, and morph on command to navigate tight spaces, stir fluids, or manipulate tiny objects in medical and lab settings.
From Simple Motion to Smart Shape-Shifting
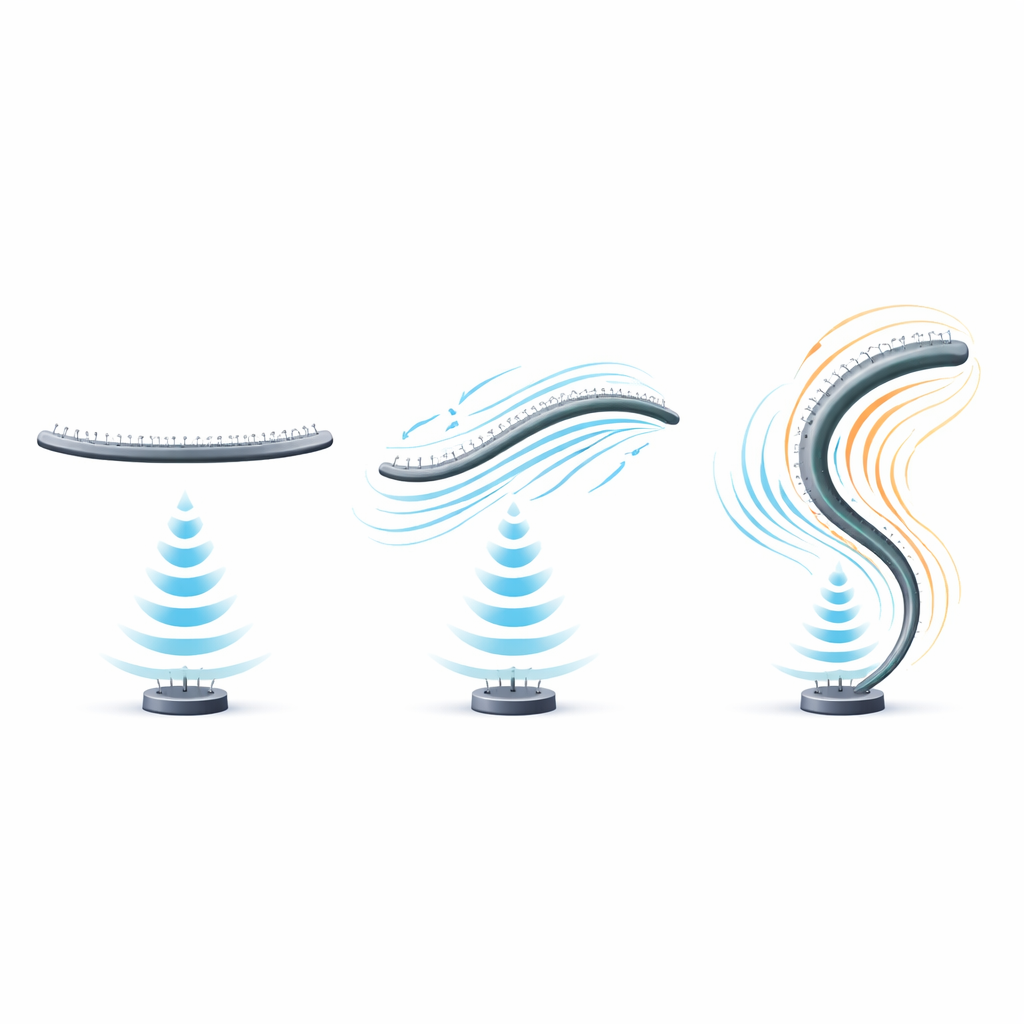
Most existing microrobots can only move in straight lines or spin like tiny propellers, which limits what they can do in crowded, complex environments such as blood vessels or tissue. The team behind this work set out to build robots that can not only move, but also change their form in controlled ways—like a soft arm that can open, close, and point in different directions. Their solution is to attach small hair-like structures, called engineered cilia, onto flexible arms made from a soft plastic. When ultrasound vibrates these cilia, they stir the surrounding fluid and create forces that bend and twist the arms. This strategy allows a single microrobot to perform multiple “hybrid” actions—from bending to rotation to more elaborate morphing—simply by tuning the sound.
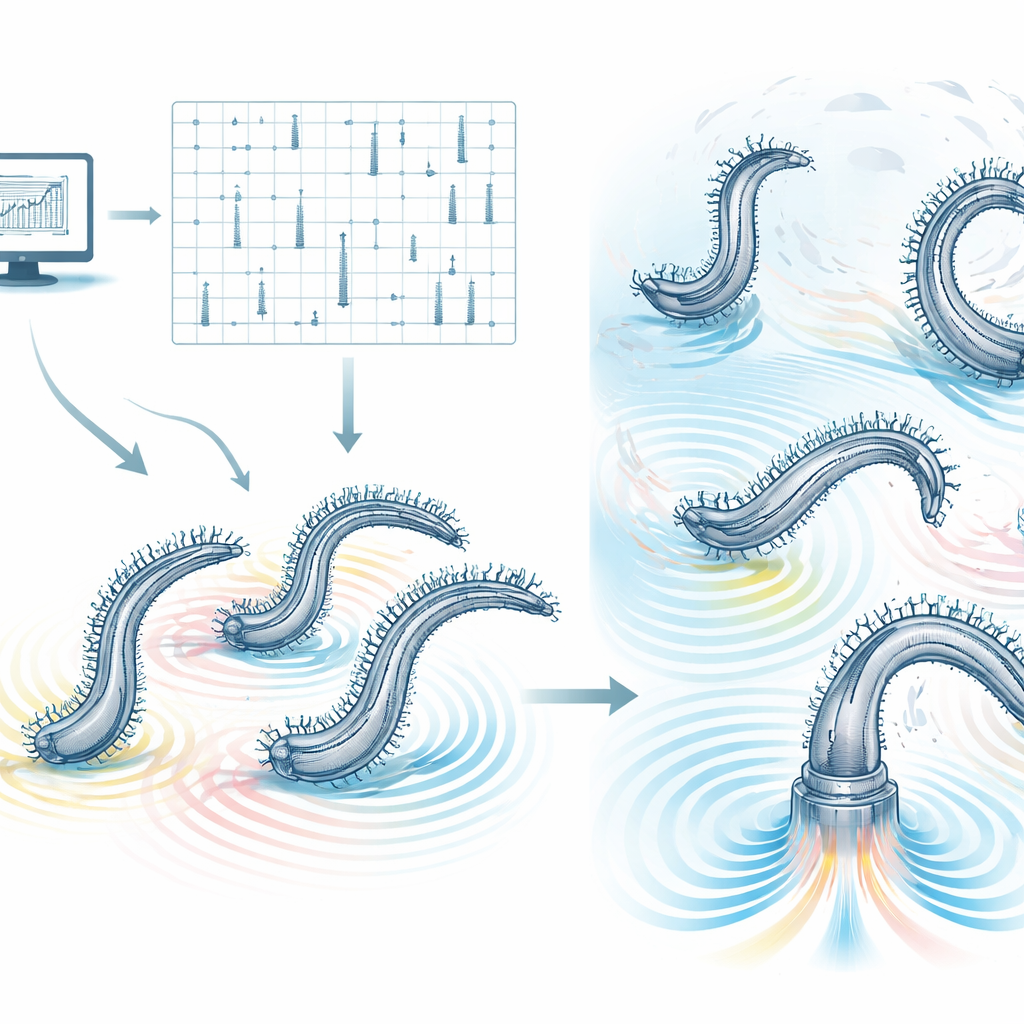
Teaching Robots to Listen to the Right Notes
A key challenge is that the way each tiny structure responds to sound depends sensitively on its exact shape and size. Finding the right geometry by trial and error would require an enormous number of computer simulations and experiments. To overcome this, the researchers created a self-improving machine learning framework that learns the link between a robot’s geometry and its resonant response to sound. They first ran a limited set of detailed physics simulations to measure how different cilia shapes vibrate and how strongly they move the surrounding fluid. These results trained a Random Forest model—a type of algorithm that can capture both smooth trends and sharp changes—to predict the resonance frequency and vibration strength for many new designs across the design space.
Faster Design with Smart Sampling
Instead of simulating every possible design, the team used an adaptive loop: the machine learning model predicts performance, then maps where its own errors are largest, and new simulations are added only in those difficult regions. After several rounds, the model’s predictions for resonance frequency were typically within about 2%, and vibration strength within about 10%, compared with full simulations. This approach cut computational time by more than one hundred thousand–fold and slashed memory needs by over twenty-fold, while still guiding the design of effective microrobots. As a result, the researchers could quickly find cilia geometries that bend in one direction at one sound frequency and in the opposite direction at another, or that rotate faster as the sound intensity increases.
Soft Joints for Many Different Moves
To give ECHObots even richer motion, the team borrowed ideas from soft robotics and compliant mechanisms—structures that flex rather than hinge on rigid joints. In one strategy, they slightly modified the material stiffness along the arms, creating softer segments that bend more easily but still recover reliably. In another, they narrowed certain regions to act as thin, flexible hinges that allow large bends at low power, at the cost of higher local stress. Using these building blocks, they assembled more complex shapes such as flower-like rotors that spin faster and curl inward under stronger sound, dome-like arrays that contract into a curved shell, and multi-segment arms that can open, close, and morph repeatedly while returning close to their original shapes.
Toward Adaptive Microscopic Tools
Taken together, this work shows that sound-driven microrobots can be designed to change shape in programmable, reversible, and precise ways, rather than only moving from place to place. The machine learning framework acts as a fast “design compass,” pointing engineers toward geometries that will respond as desired to specific sound frequencies and strengths. The soft structures and compliant joints provide the physical means for lifelike motion at microscopic scales. In the future, such ECHObots could be tailored to tasks like opening and closing tiny valves, mixing fluids in lab-on-a-chip devices, or gently manipulating particles and cells inside the body, opening a path toward smart, adaptable micromachines for medicine and microengineering.
Citation: Ling, Y., Lu, Y., Rich, J. et al. Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots. Nat Commun 17, 3870 (2026). https://doi.org/10.1038/s41467-026-70048-4
Keywords: acoustic microrobots, soft robotics, engineered cilia, machine learning design, microscale actuation