Clear Sky Science · fr
Conception pilotée par apprentissage automatique de cils conçus permettant des opérations hybrides dans des microrobots acoustiques
Petits aides pour de grands défis médicaux
Les hôpitaux comptent de plus en plus sur des outils capables d’agir en profondeur dans le corps, là où scalpels et cathéters n’atteignent pas facilement. Cet article présente un nouveau type de robot microscopique, plus petit qu’un grain de sable, capable de modifier délicatement sa forme lorsqu’il est entraîné par des ondes sonores. En combinant conception ingénieuse, matériaux souples et apprentissage automatique, les chercheurs montrent comment ces « ECHObots » pourraient un jour se courber, se tordre et se métamorphoser sur commande pour franchir des espaces étroits, agiter des fluides ou manipuler de minuscules objets en contexte médical ou en laboratoire.
Du mouvement simple au changement de forme intelligent
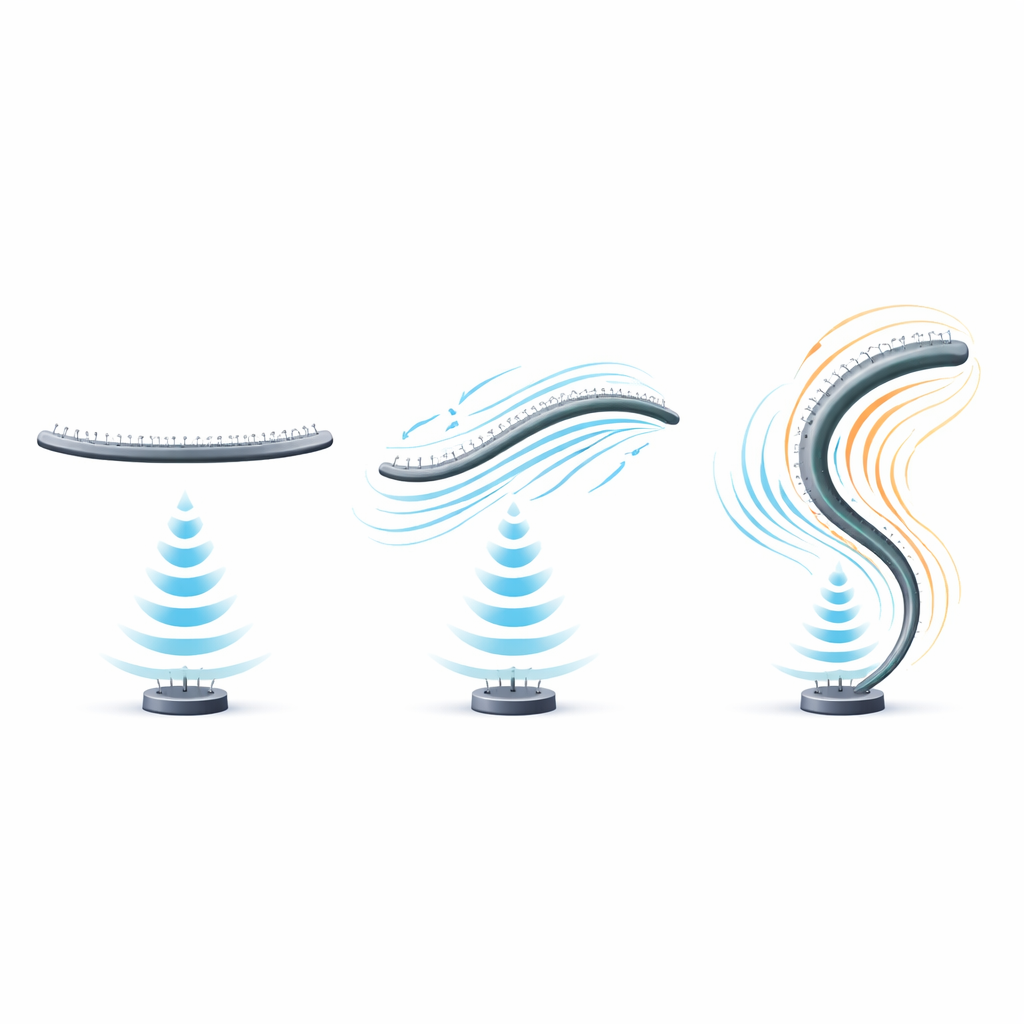
La plupart des microrobots existants ne peuvent que se déplacer en ligne droite ou tourner comme de minuscules hélices, ce qui limite leurs capacités dans des environnements encombrés et complexes tels que les vaisseaux sanguins ou les tissus. L’équipe à l’origine de ce travail s’est donné pour objectif de construire des robots qui non seulement se déplacent, mais aussi changent de forme de manière contrôlée — comme un bras souple qui peut s’ouvrir, se fermer et pointer dans différentes directions. Leur solution consiste à fixer de petites structures en forme de poils, appelées cils conçus, sur des bras flexibles fabriqués en plastique souple. Lorsque des ultrasons font vibrer ces cils, ils brassent le fluide environnant et génèrent des forces qui courbent et tordent les bras. Cette stratégie permet à un seul microrobot d’exécuter plusieurs actions « hybrides » — de la flexion à la rotation en passant par des morphings plus élaborés — simplement en réglant le son.
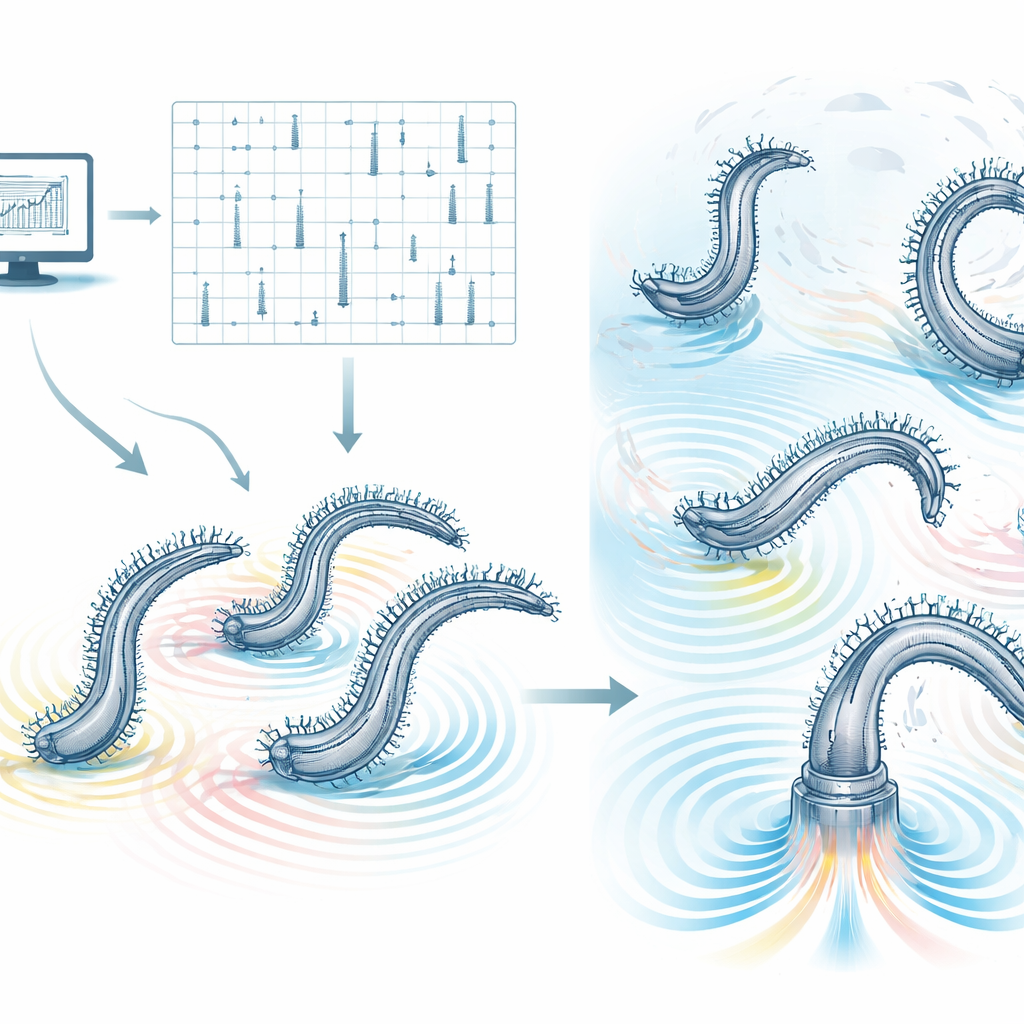
Apprendre aux robots à écouter les bonnes notes
Un défi majeur est que la réponse de chaque petite structure au son dépend sensiblement de sa forme et de sa taille exactes. Trouver la géométrie adéquate par tâtonnements exigerait un nombre énorme de simulations et d’expériences. Pour surmonter cela, les chercheurs ont créé un cadre d’apprentissage automatique auto-améliorant qui apprend le lien entre la géométrie d’un robot et sa réponse résonante au son. Ils ont d’abord réalisé un ensemble limité de simulations physiques détaillées pour mesurer comment différentes formes de cils vibrent et dans quelle mesure elles déplacent le fluide environnant. Ces résultats ont servi à entraîner un modèle Random Forest — un type d’algorithme capable de capter à la fois des tendances lisses et des variations abruptes — pour prédire la fréquence de résonance et l’amplitude de vibration pour de nombreux nouveaux designs à travers l’espace de conception.
Conception accélérée grâce à un échantillonnage intelligent
Plutôt que de simuler chaque conception possible, l’équipe a utilisé une boucle adaptative : le modèle d’apprentissage automatique prédit les performances, puis cartographie les régions où ses propres erreurs sont les plus grandes, et de nouvelles simulations ne sont ajoutées que dans ces zones difficiles. Après plusieurs itérations, les prédictions du modèle pour la fréquence de résonance étaient typiquement correctes à environ 2 %, et l’amplitude des vibrations à environ 10 %, par rapport aux simulations complètes. Cette approche a réduit le temps de calcul de plus de cent mille fois et a diminué les besoins en mémoire de plus de vingt fois, tout en guidant la conception de microrobots efficaces. En conséquence, les chercheurs ont pu rapidement identifier des géométries de cils qui se courbent dans un sens à une fréquence sonore et dans le sens opposé à une autre, ou qui tournent plus vite à mesure que l’intensité sonore augmente.
Articulations souples pour une grande diversité de mouvements
Pour doter les ECHObots d’un comportement encore plus riche, l’équipe a emprunté des idées à la robotique souple et aux mécanismes conformables — des structures qui se déforment plutôt que de pivoter sur des articulations rigides. Dans une stratégie, ils ont légèrement modifié la rigidité du matériau le long des bras, créant des segments plus souples qui se plient plus facilement tout en retrouvant fiablement leur forme. Dans une autre, ils ont rétréci certaines régions pour faire office de charnières fines et flexibles permettant de fortes courbures à basse puissance, au prix d’une contrainte locale plus élevée. En utilisant ces blocs de construction, ils ont assemblé des formes plus complexes telles que des rotors en forme de fleur qui tournent plus vite et se recroquevillent sous un son plus intense, des réseaux en dôme qui se contractent en une coquille courbe, et des bras à plusieurs segments capables de s’ouvrir, se fermer et se métamorphoser de manière répétée tout en revenant proche de leur forme initiale.
Vers des outils microscopiques adaptatifs
Dans l’ensemble, ce travail montre que des microrobots actionnés par le son peuvent être conçus pour changer de forme de manière programmable, réversible et précise, plutôt que de se contenter de se déplacer. Le cadre d’apprentissage automatique agit comme une « boussole de conception » rapide, orientant les ingénieurs vers des géométries qui répondront comme souhaité à des fréquences et intensités sonores spécifiques. Les structures souples et les articulations conformables fournissent les moyens physiques d’un mouvement « vivant » à l’échelle microscopique. À l’avenir, de tels ECHObots pourraient être adaptés à des tâches comme l’ouverture et la fermeture de minuscules valves, le mélange de fluides dans des dispositifs lab-on-a-chip, ou la manipulation délicate de particules et de cellules à l’intérieur du corps, ouvrant la voie à des micromachines intelligentes et adaptables pour la médecine et la micro-ingénierie.
Citation: Ling, Y., Lu, Y., Rich, J. et al. Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots. Nat Commun 17, 3870 (2026). https://doi.org/10.1038/s41467-026-70048-4
Mots-clés: microrobots acoustiques, robotique souple, cils conçus, conception par apprentissage automatique, actionnement à l’échelle microscopique