Clear Sky Science · he
עיצוב מונחה למידת מכונה של ריסים מהונדסים מאפשר פעולה היברידית במיקרורובוטים אקוסטיים
עוזרים זעירים לאתגרי רפואה גדולים
בתי חולים מסתמכים יותר ויותר על כלים שיכולים לפעול עמוק בתוך הגוף, שם סקלפלים וקטטרים אינם מגיעים בקלות. מאמר זה מציג סוג חדש של מיקרורובוט, קטן יותר מגרגר חול, שיכול לשנות את צורתו בעדינות כאשר הוא מונע על ידי גלי קול. על-ידי שילוב של עיצוב חכם, חומרים רכים ולמידת מכונה, החוקרים מראים כיצד ה"ECHObots" הללו עשויים אי-פעם לכופף, לסובב ולהשתנות לפי פקודה כדי לנווט בחללים צרים, לערבב נוזלים או למניפולציה של עצמים זעירים בהקשרים רפואיים ומעבדתיים.
מתנועה פשוטה לשינוי צורה חכם
רוב המיקרורובוטים הקיימים מסוגלים רק לנוע בקווים ישרים או להסתובב כמו מדחפים זעירים, מה שמגביל את מה שהם יכולים לעשות בסביבות צפופות ומורכבות כמו כלי דם או רקמות. הצוות מאחורי העבודה הזו שאף לבנות רובוטים שיכולים לא רק לנוע, אלא גם לשנות את צורתם באופן מבוקר — כמו זרוע רכה שיכולה להיפתח, להיסגר ולהצביע בכיוונים שונים. הפתרון שלהם הוא להצמיד מבנים קטנים דמויי שיערה, המכונים ריסים מהונדסים, על זרועות גמישות העשויות מפלסטיק רך. כאשר אולטרסאונד מרעיד את הריסים האלה, הם מערבבים את הנוזל סביבם ויוצרים כוחות הכורעים וכורכים את הזרועות. אסטרטגיה זו מאפשרת למיקרורובוט יחיד לבצע מספר פעולות "היברידיות" — מכיפוף וסיבוב ועד עיצובים מורכבים יותר של שינוי צורה — פשוט על ידי התאמת הצליל.
לימוד הרובוטים להקשיב לתווים הנכונים
אתגר מרכזי הוא שהאופן שבו כל מבנה זעיר מגיב לקול תלוי ברגישות בצורתו ובגודלו המדויקים. מציאת הגאומטריה הנכונה בניסוי וטעייה תדרוש כמות עצומה של סימולציות ממוחשבות וניסויים. כדי להתגבר על כך, החוקרים יצרו מסגרת למידת מכונה שמשתפרת בעצמה ולומדת את הקשר בין גאומטריית הרובוט לתגובתו הרזוננטית לקול. הם הריצו תחילה סט מוגבל של סימולציות פיזיקליות מפורטות כדי למדוד כיצד צורות ריס שונות רטטות וכמה חזק הן מזיזות את הנוזל הסביבתי. תוצאות אלה אימנו מודל Random Forest — סוג אלגוריתם שיכול לתפוס גם מגמות חלקות וגם שינויים חדים — כדי לחזות את תדירות התהודה ועוצמת הרטט עבור עיצובים חדשים רבים במרחב העיצוב.
עיצוב מהיר יותר עם דגימה חכמה
במקום לדמות כל עיצוב אפשרי, הצוות השתמש בלולאה אדפטיבית: מודל למידת המכונה צופה ביצוע, אז ממפה היכן טעויותיו הגדולות ביותר, ומוסיפות סימולציות חדשות רק באותן אזורים קשים. לאחר מספר סבבים, תחזיות המודל עבור תדירות התהודה היו בדרך כלל בתוך כ-2%, ועוצמת הרטט בתוך כ-10%, בהשוואה לסימולציות מלאות. גישה זו קיצצה את זמן המחשב בלמעלה ממאה אלף פעמים והפחיתה את צרכי הזיכרון ביותר מעשרים פעמים, בזמן שהיא עדיין מנחה את עיצוב המיקרורובוטים היעילים. כתוצאה מכך, החוקרים יכלו למצוא במהירות גאומטריות ריסים שמכופפות בכיוון אחד בתדירות קול אחת ובכיוון ההפוך בתדירות אחרת, או שמסתובבות מהר יותר ככל שעוצמת הקול מוגברת.
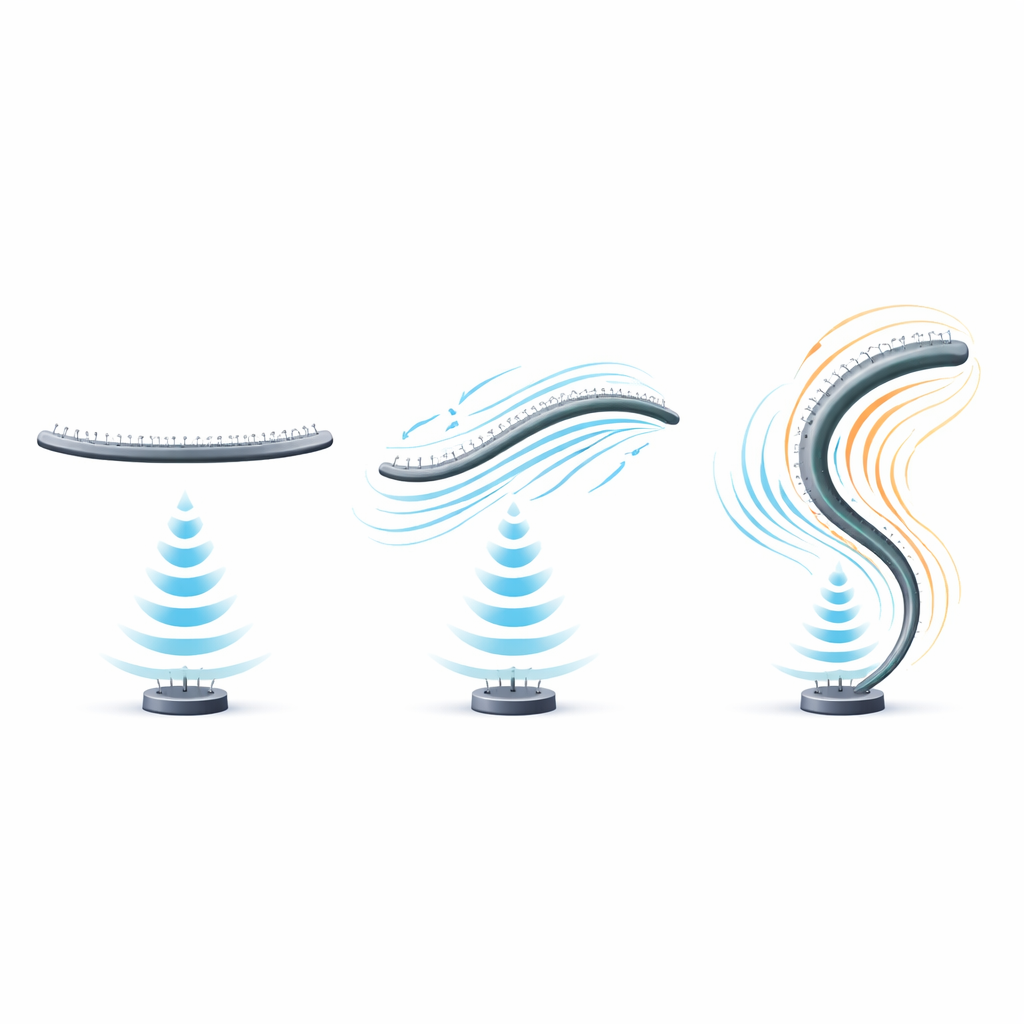
מפרקים רכים לתנועות רבות
כדי להעניק ל-ECHObots תנועה עשירה יותר, הצוות שאב רעיונות מרובוטיקה רכה וממנגנוני ציות — מבנים שמתכופפים במקום לנעול במפרקים קשים. באסטרטגיה אחת הם שינו במעט את קשיות החומר לאורך הזרועות, ויצרו מקטעים רכים יותר שמתכופפים בקלות אך עדיין חוזרים באופן אמין. באסטרטגיה אחרת הם צמצמו אזורים מסוימים כדי לפעול כמפרקים דקים וגמישים שמאפשרים כיפופים גדולים בעוצמה נמוכה, במחיר של מתח מקומי גבוה יותר. באמצעות בלוקים בנייה אלה הם אספו צורות מורכבות יותר כגון מדחים דמויי פרח שמסתובבים מהר יותר ומתכרכים פנימה תחת קול חזק יותר, מערכים דמויי כיפה שמתכווצים לקליפה מעוקלת, וזרועות מרובות מקטעים שיכולות להיפתח, להיסגר ולהשתנות שוב ושוב תוך חזרה קרובה לצורתן המקורית.
לעבר כלים מיקרוסקופיים אדפטיביים
בהתכנסות, עבודה זו מראה שניתן לעצב מיקרורובוטים המונעים על-ידי קול כך שישנו את צורתם בצורה תכניתית, הפיכה ומדויקת, במקום רק להעתיק מקום. מסגרת למידת המכונה משמשת כ"מצפן עיצוב" מהיר, המנחה מהנדסים לעבר גאומטריות שיגיבו כנדרש לתדירויות ועוצמות קול מסוימות. המבנים הרכים והמפרקים הצייתניים מספקים את האמצעים הפיזיים לתנועה דמוית-חיים בקני מידה מיקרוסקופיים. בעתיד, ECHObots כאלה יוכלו להיות ממוקדים למשימות כמו פתיחה וסגירה של שסתומים זעירים, ערבוב נוזלים במכשירי מעבדה-על-שבב, או מניפולציה עדינה של חלקיקים ותאים בתוך הגוף, ויפתחו דרך למיקרומכונות חכמות ומתאימות לרפואה ולמיקרו-הנדסה.
ציטוט: Ling, Y., Lu, Y., Rich, J. et al. Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots. Nat Commun 17, 3870 (2026). https://doi.org/10.1038/s41467-026-70048-4
מילות מפתח: מיקרורובוטים אקוסטיים, רובוטיקה רכה, ריסים מהונדסים, עיצוב בלמידת מכונה, אקטואציה בקנה-מידה מיקרו