Clear Sky Science · nl
Machine learning–gestuurde ontwerpe van geconstrueerde trilharen maken hybride werking mogelijk in akoestische microrobots
Kleine helpers voor grote medische uitdagingen
Ziekenhuizen vertrouwen steeds meer op instrumenten die diep in het lichaam kunnen werken, waar scalpels en katheters niet gemakkelijk bij kunnen. Dit artikel introduceert een nieuw soort microscopische robot, kleiner dan een zandkorrel, die zachtjes van vorm kan veranderen wanneer hij door geluidsgolven wordt aangedreven. Door slim ontwerp, zachte materialen en machine learning te combineren, laten de onderzoekers zien hoe deze “ECHObots” op een dag op commando kunnen buigen, draaien en van vorm veranderen om krappe ruimten te verkennen, vloeistoffen te roeren of kleine objecten te manipuleren in medische en laboratoriumomgevingen.
Van eenvoudige beweging tot slim vormverandering
De meeste bestaande microrobots kunnen alleen in rechte lijnen bewegen of draaien als kleine propellers, wat hun mogelijkheden beperkt in drukke, complexe omgevingen zoals bloedvaten of weefsel. Het team achter dit werk wilde robots bouwen die niet alleen kunnen bewegen, maar ook gecontroleerd van vorm kunnen veranderen—zoals een zachte arm die kan openen, sluiten en in verschillende richtingen wijzen. Hun oplossing is het bevestigen van kleine haarachtige structuren, zogenaamde geconstrueerde trilharen, op flexibele armen gemaakt van een zacht kunststof. Wanneer ultrageluid deze trilharen laat vibreren, roeren ze de omringende vloeistof en creëren ze krachten die de armen doen buigen en torsen. Deze strategie stelt een enkele microrobot in staat meerdere “hybride” acties uit te voeren—van buigen tot rotatie tot complexere morfologieën—slechts door de klank af te stemmen.
Robots leren naar de juiste tonen te luisteren
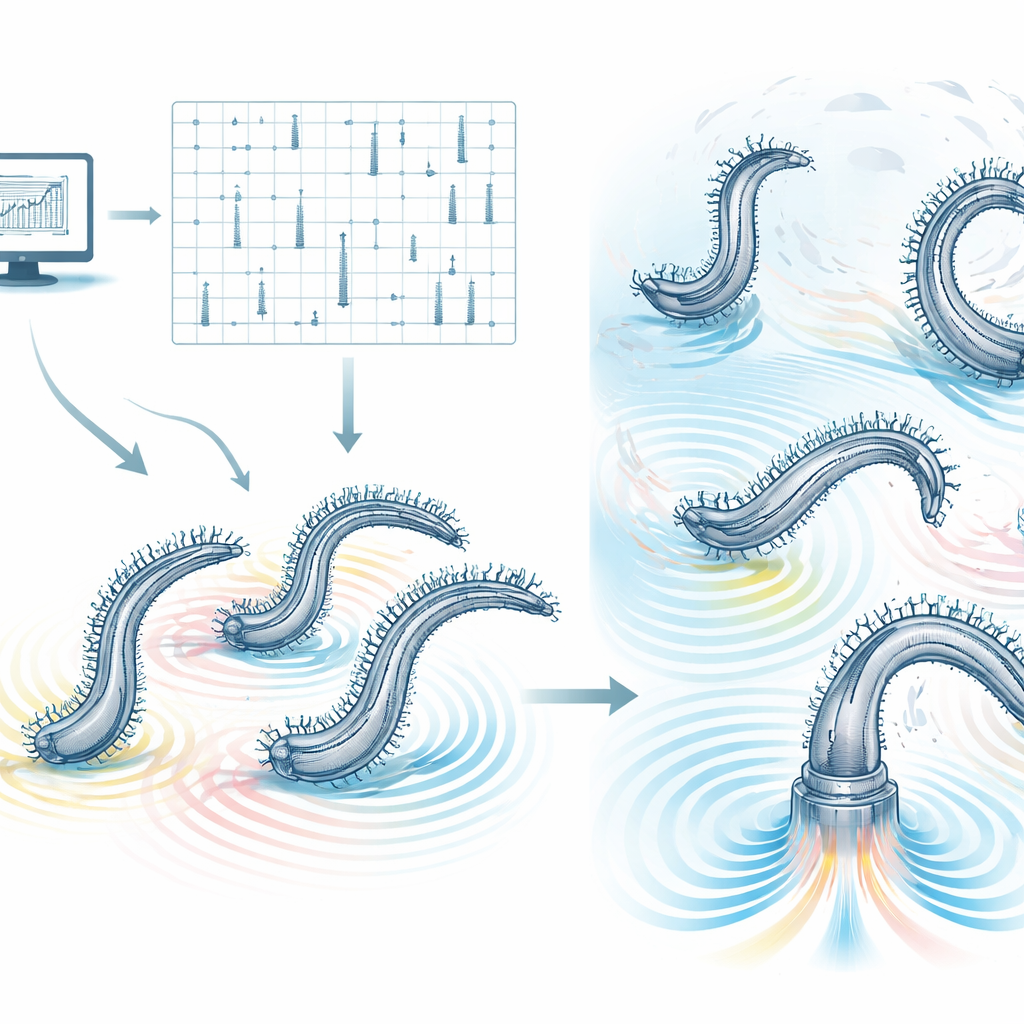
Een belangrijke uitdaging is dat de manier waarop elk tiny structuur op geluid reageert sterk afhangt van de exacte vorm en afmetingen. Het vinden van de juiste geometrie door vallen en opstaan zou een enorme hoeveelheid computersimulaties en experimenten vereisen. Om dit te overwinnen, creëerden de onderzoekers een zelfverbeterend machine learning‑kader dat de relatie leert tussen de geometrie van een robot en zijn resonantiegedrag bij geluid. Ze voerden eerst een beperkte set gedetailleerde fysicasimulaties uit om te meten hoe verschillende trilharen vibreren en hoe sterk ze de omringende vloeistof verplaatsen. Deze resultaten trainden een Random Forest‑model—een type algoritme dat zowel vloeiende trends als scherpe overgangen kan vastleggen—om de resonantiefrequentie en vibratiesterkte voor veel nieuwe ontwerpen in het ontwerpruimte te voorspellen.
Sneller ontwerpen met slimme bemonstering
In plaats van elke mogelijke ontwerp te simuleren, gebruikte het team een adaptieve lus: het machine learning‑model voorspelt prestaties, brengt vervolgens in kaart waar zijn eigen fouten het grootst zijn, en nieuwe simulaties worden alleen in die moeilijke regio’s toegevoegd. Na verschillende rondes lagen de modelvoorspellingen voor resonantiefrequentie doorgaans binnen ongeveer 2% en voor vibratiesterkte binnen ongeveer 10% vergeleken met volledige simulaties. Deze aanpak verkortte de rekentijd met meer dan honderdduizendvoud en verlaagde het geheugenverbruik meer dan twintigvoudig, terwijl ze toch het ontwerpen van effectieve microrobots begeleidde. Daardoor konden de onderzoekers snel trilharengeometrieën vinden die in de ene richting buigen bij een bepaalde geluidsfrequentie en in de tegengestelde richting bij een andere, of die sneller roteren naarmate de geluidsintensiteit toeneemt.
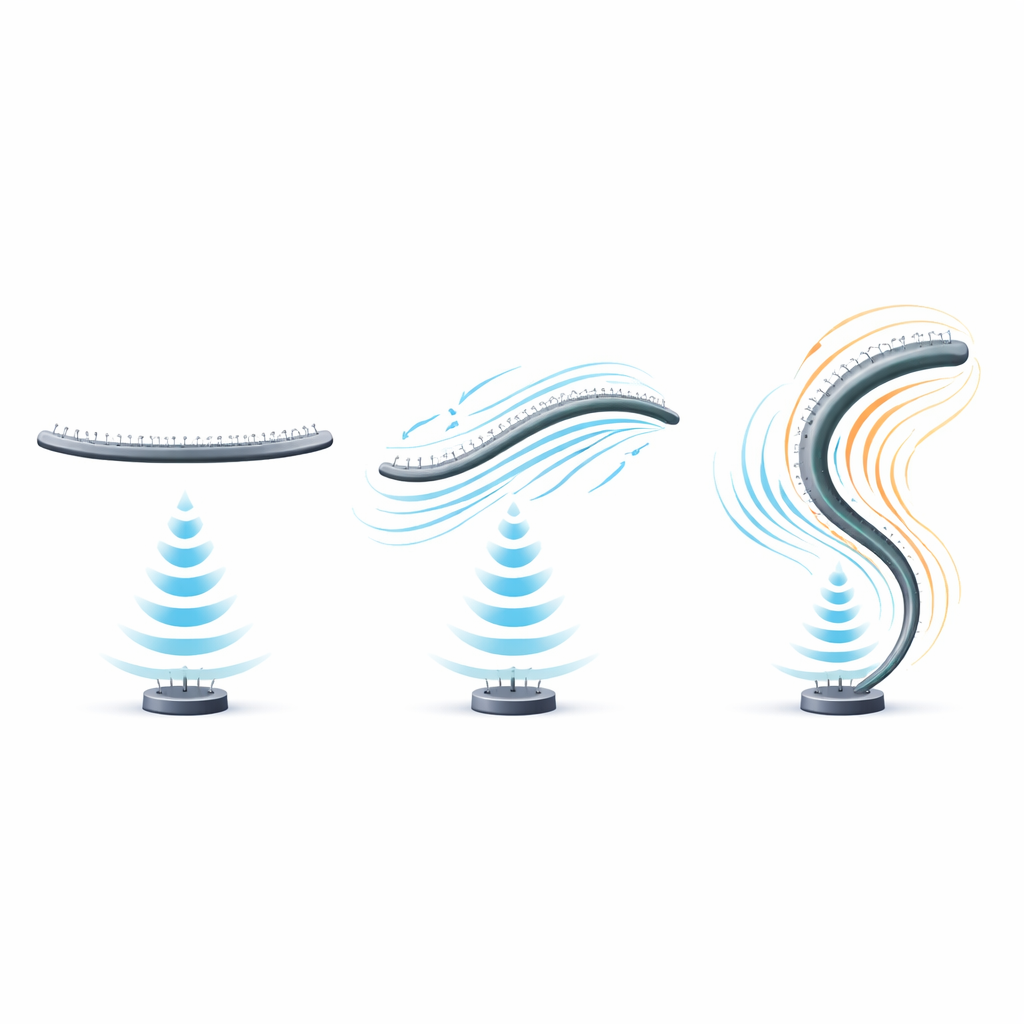
Zachte gewrichten voor veel verschillende bewegingen
Om ECHObots nog rijkere bewegingen te geven, leende het team ideeën uit soft robotics en compliant mechanisms—structuren die buigen in plaats van scharnieren op stijve verbindingen. In één strategie pasten ze de materiaalflexibiliteit langs de armen lichtjes aan, waardoor zachtere segmenten ontstonden die gemakkelijker buigen maar toch betrouwbaar terugveren. In een andere vernauwden ze bepaalde regio’s zodat die fungeren als dunne, flexibele scharnieren die grote buigingen bij laag vermogen toelaten, tegen de prijs van hogere lokale spanningen. Met deze bouwstenen assembleerden ze complexere vormen zoals bloemachtige rotoren die sneller draaien en bij sterker geluid naar binnen krullen, koepelachtige arrays die samentrekken tot een gebogen schaal, en meersegmentige armen die herhaaldelijk kunnen openen, sluiten en van vorm veranderen terwijl ze dicht bij hun oorspronkelijke vorm terugkeren.
Op weg naar adaptieve microscopische instrumenten
Gezamenlijk toont dit werk aan dat door geluid aangedreven microrobots zo kunnen worden ontworpen dat ze programmeerbaar, omkeerbaar en precies van vorm veranderen, in plaats van alleen van plaats te verplaatsen. Het machine learning‑kader fungeert als een snel “ontwerprichtsnoer” dat ingenieurs naar geometrieën wijst die op gewenste wijze op specifieke geluidsfrequenties en -sterktes reageren. De zachte structuren en complyante gewrichten bieden de fysieke middelen voor levensechte beweging op microscopische schaal. In de toekomst kunnen zulke ECHObots worden afgestemd op taken zoals het openen en sluiten van piepkleine kleppen, het mengen van vloeistoffen in lab‑on‑a‑chip‑apparaten, of het voorzichtig manipuleren van deeltjes en cellen in het lichaam, en daarmee de weg vrijmaken voor slimme, aanpasbare micromachines voor geneeskunde en microengineering.
Bronvermelding: Ling, Y., Lu, Y., Rich, J. et al. Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots. Nat Commun 17, 3870 (2026). https://doi.org/10.1038/s41467-026-70048-4
Trefwoorden: akoestische microrobots, soft robotics, geconstrueerde trilharen, machine learning ontwerp, microschaal aandrijving