Clear Sky Science · ar
تصميم محركات الأهداب المهندسة بواسطة تعلّم الآلة يتيح عمليات هجينة في الميكروبوتات الصوتية
مساعدون صغار لتحديات طبية كبيرة
تعتمد المستشفيات بشكل متزايد على أدوات تعمل داخل الجسم حيث لا تستطيع المشارط والقساطر الوصول بسهولة. تقدم هذه الورقة نوعًا جديدًا من الروبوتات الميكروسكوبية، أصغر من حبة رمل، قادرة على تغيير شكلها بلطف عندما تُفعّل بموجات صوتية. من خلال الجمع بين تصميم ذكي ومواد ناعمة وتعلّم آلي، يبيّن الباحثون كيف يمكن لهذه «روبوتات ECHO» أن تنحني وتلتف وتتغير أشكالها حسب الأوامر للتنقل في فراغات ضيقة، تحريك السوائل، أو التلاعب بأجسام صغيرة في البيئات الطبية والمخبرية.
من حركة بسيطة إلى تغيّر شكل ذكي
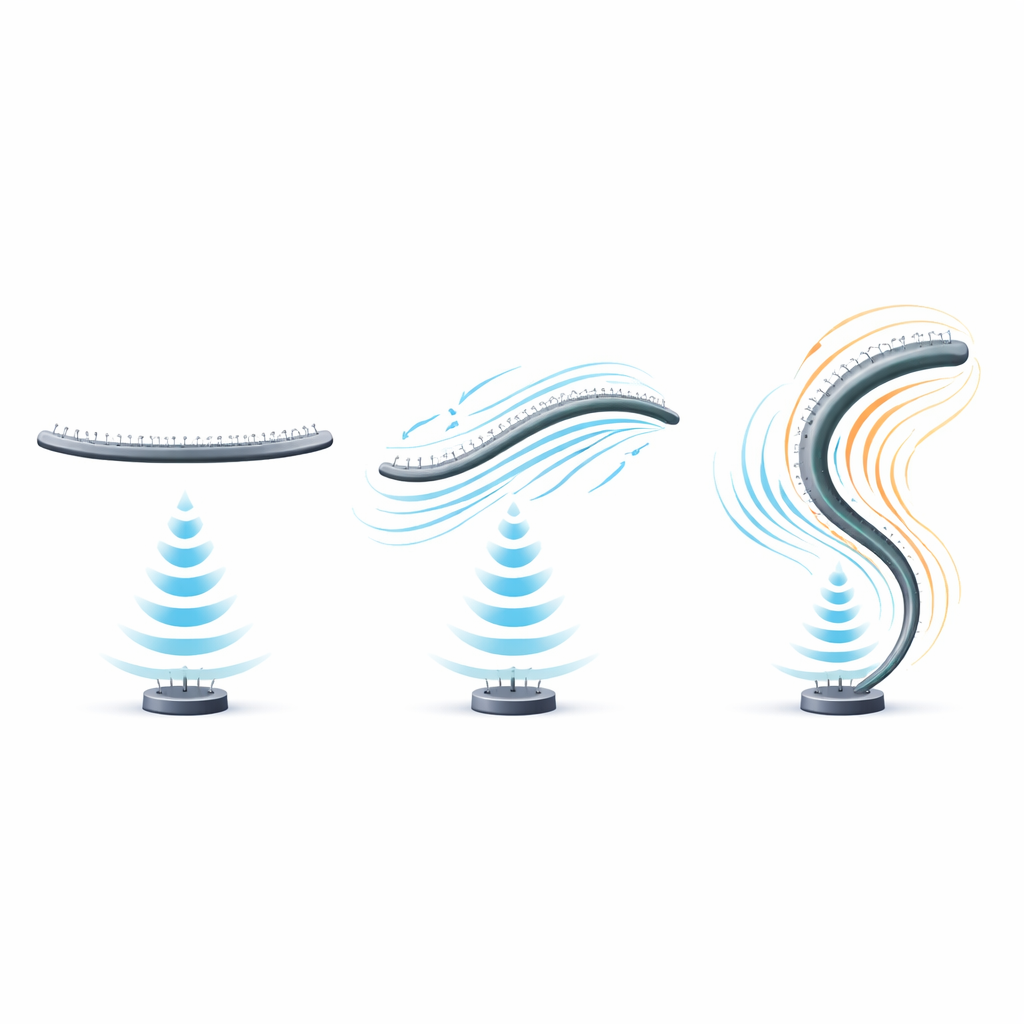
معظم الميكروبوتات الحالية تَقتصر على التحرك في خطوط مستقيمة أو الدوران مثل المراوح الصغيرة، وهذا يقيّد قدرتها في بيئات مكتظة ومعقدة مثل الأوعية الدموية أو الأنسجة. سعى الفريق وراء هذا العمل إلى بناء روبوتات لا تتحرك فحسب، بل وتغير شكلها بطرق مضبوطة—مثل ذراع ناعم يمكنه الفتح والإغلاق والإشارة في اتجاهات مختلفة. حلّهم يكمن في إرفاق هياكل صغيرة شبيهة بالشعر، تُسمّى أهداب مهندسة، بأذرع مرنة مصنوعة من بلاستيك طري. عندما تهتز هذه الأهداب بواسطة الموجات فوق الصوتية، فإنها تحرك السوائل المحيطة وتولد قوى تُثنِي وتلوّي الأذرع. هذه الاستراتيجية تسمح لميكروبوت واحد بأداء عدة أفعال «هجينة»—من الانحناء إلى الدوران إلى تغيّرات أكثر تعقيدًا—مجرد تعديل الصوت.
تعليم الروبوتات الاستجابة للنغمات الصحيحة
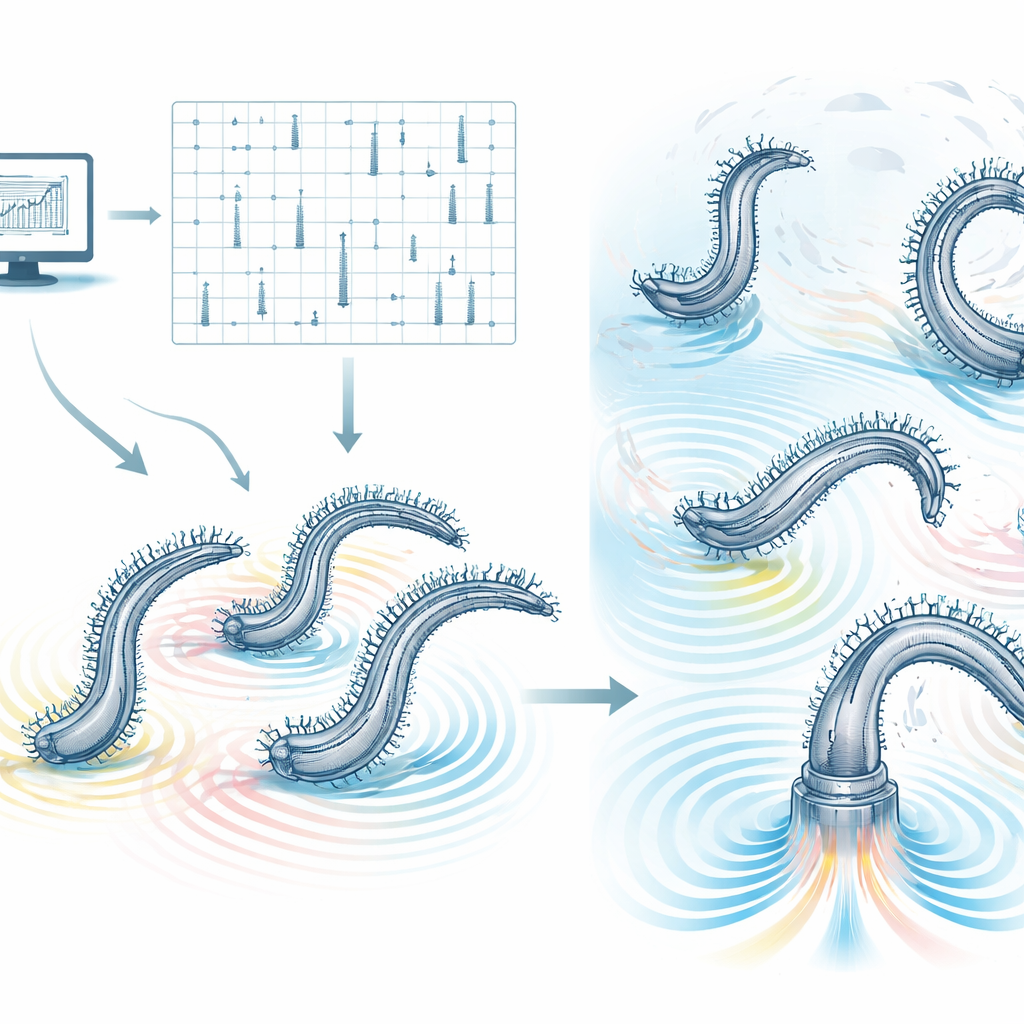
تكمن مشكلة أساسية في أن استجابة كل بنية صغيرة للصوت تعتمد بدقة على شكلها وحجمها بالذات. إيجاد الهندسة المناسبة عن طريق التجربة والخطأ يتطلب عددًا هائلاً من المحاكيات الحاسوبية والتجارب. للتغلب على ذلك، أنشأ الباحثون إطارًا للتعلّم الآلي يتحسّن ذاتيًا ويتعلم الارتباط بين هندسة الروبوت واستجابته الرنانة للصوت. أجروا أولًا مجموعة محدودة من المحاكاة الفيزيائية التفصيلية لقياس كيف تهتز أشكال الأهداب المختلفة ومدى تأثيرها في تحريك السائل المحيط. درّبت هذه النتائج نموذج غابة عشوائية—وهو نوع من الخوارزميات القادر على التقاط الاتجاهات السلسة والتغيرات الحادة—لتوقّع تردد الرنين وقوة الاهتزاز لتصاميم جديدة عبر فضاء التصميم.
تصميم أسرع عبر أخذ عينات ذكي
بدلًا من محاكاة كل تصميم ممكن، استخدم الفريق حلقة تكيفية: يتنبأ نموذج التعلّم الآلي بالأداء، ثم يرسم خريطة لأماكن أكبر أخطاءه، وتُضاف محاكيات جديدة فقط في تلك المناطق الصعبة. بعد عدة جولات، كانت تنبؤات النموذج لتردد الرنين عادة ضمن حوالي 2%، وقوة الاهتزاز ضمن حوالي 10%، مقارنة بمحاكاة كاملة. قلّص هذا النهج زمن الحساب بأكثر من مئة ألف مرة وقلّل الحاجة للذاكرة بأكثر من عشرين مرة، مع الاستمرار في توجيه تصميم ميكروبوتات فعالة. نتيجة لذلك، استطاع الباحثون إيجاد هندسات أهداب تنحني في اتجاه عند تردد صوتي واحد وفي الاتجاه المعاكس عند تردد آخر، أو تدور أسرع مع ازدياد شدة الصوت.
مفاصل ناعمة لحركات متنوعة
لإضفاء حركة أكثر ثراءً على روبوتات ECHO، استعان الفريق بأفكار من الروبوتات المرنة والآليات المطاوعة—هياكل تنثني بدلًا من أن تعتمد على مفاصل صلبة. في إحدى الاستراتيجيات، عدّلوا قليلاً صلابة المادة على طول الأذرع، فخلّقوا مقاطع أكثر ليونة تنثني بسهولة أكبر لكنها لا تزال تستعيد شكلها بموثوقية. وفي أخرى، ضيّقوا مناطق معينة لتعمل كمحاور رقيقة ومرنة تسمح بانحناءات كبيرة بقدرة منخفضة، مع تحمل إجهاد محلي أعلى. باستخدام هذه اللبنات، ركبوا أشكالًا أكثر تعقيدًا مثل دوارات شبيهة بالأزهار تدور أسرع وتلتف إلى الداخل تحت صوت أقوى، ومصفوفات قبهية تنكمش إلى غلاف منحني، وأذرع متعددة المقاطع يمكنها الفتح والإغلاق والتشكّل مرارًا مع العودة قريبًا إلى أشكالها الأصلية.
نحو أدوات مجهرية قابلة للتكيّف
يعرض هذا العمل مجتمعًا أن الروبوتات المدفوعة بالصوت يمكن تصميمها لتغيّر شكلها بطريقة قابلة للبرمجة، قابلة للعكس، ودقيقة، بدلًا من الاقتصار على الانتقال من مكان إلى آخر. يعمل إطار التعلّم الآلي كبوصلة تصميم سريعة، توجّه المهندسين نحو هندسات ستستجيب كما هو مطلوب لترددات وشدّات صوتية محددة. توفر الهياكل الناعمة والمفاصل المطاوعة الوسائل الفيزيائية لحركة شبيهة بالحياة على المقاييس المجهرية. في المستقبل، يمكن تفصيل روبوتات ECHO لمهمات مثل فتح وإغلاق صمامات صغيرة، خلط سوائل في أجهزة مخبرية مصغّرة، أو التلاعب بلطف بجسيمات وخلايا داخل الجسم، فاتحةً الطريق أمام ميكروآلات ذكية وقابلة للتكيّف في الطب والهندسة الميكروية.
الاستشهاد: Ling, Y., Lu, Y., Rich, J. et al. Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots. Nat Commun 17, 3870 (2026). https://doi.org/10.1038/s41467-026-70048-4
الكلمات المفتاحية: الميكروبوتات الصوتية, الروبوتات المرنة, الأهداب المهندسة, تصميم بتعلّم الآلة, التشغيل على مقياس مجهري