Clear Sky Science · it
Progettazione guidata dal machine learning di ciglia ingegnerizzate per operazioni ibride in microrobot acustici
Piccoli aiutanti per grandi sfide mediche
Gli ospedali fanno sempre più affidamento su strumenti in grado di operare in profondità nel corpo, dove bisturi e cateteri non possono facilmente arrivare. Questo articolo presenta un nuovo tipo di robot microscopico, più piccolo di un granello di sabbia, che può deformarsi delicatamente se stimolato da onde sonore. Combinando progettazione intelligente, materiali morbidi e machine learning, i ricercatori mostrano come questi “ECHObot” potrebbero un giorno piegarsi, torcersi e assumere forme su comando per navigare in spazi stretti, mescolare fluidi o manipolare oggetti minuscoli in contesti medici e di laboratorio.
Dal semplice movimento al cambiamento di forma intelligente
La maggior parte dei microrobot esistenti può solo muoversi in linea retta o ruotare come minuscole eliche, il che limita le loro capacità in ambienti affollati e complessi come vasi sanguigni o tessuti. Il team alla base di questo lavoro si è proposto di costruire robot che non solo si muovono, ma cambiano forma in modi controllati—come un braccio morbido che può aprirsi, chiudersi e puntare in direzioni diverse. La loro soluzione consiste nell’applicare piccole strutture simili a peli, chiamate ciglia ingegnerizzate, su bracci flessibili realizzati con una plastica morbida. Quando l’ultrasuono fa vibrare queste ciglia, esse mescolano il fluido circostante e generano forze che piegano e torcono i bracci. Questa strategia permette a un singolo microrobot di eseguire più azioni “ibride”—dalla flessione alla rotazione fino a morfologie più elaborate—semplicemente regolando il suono.
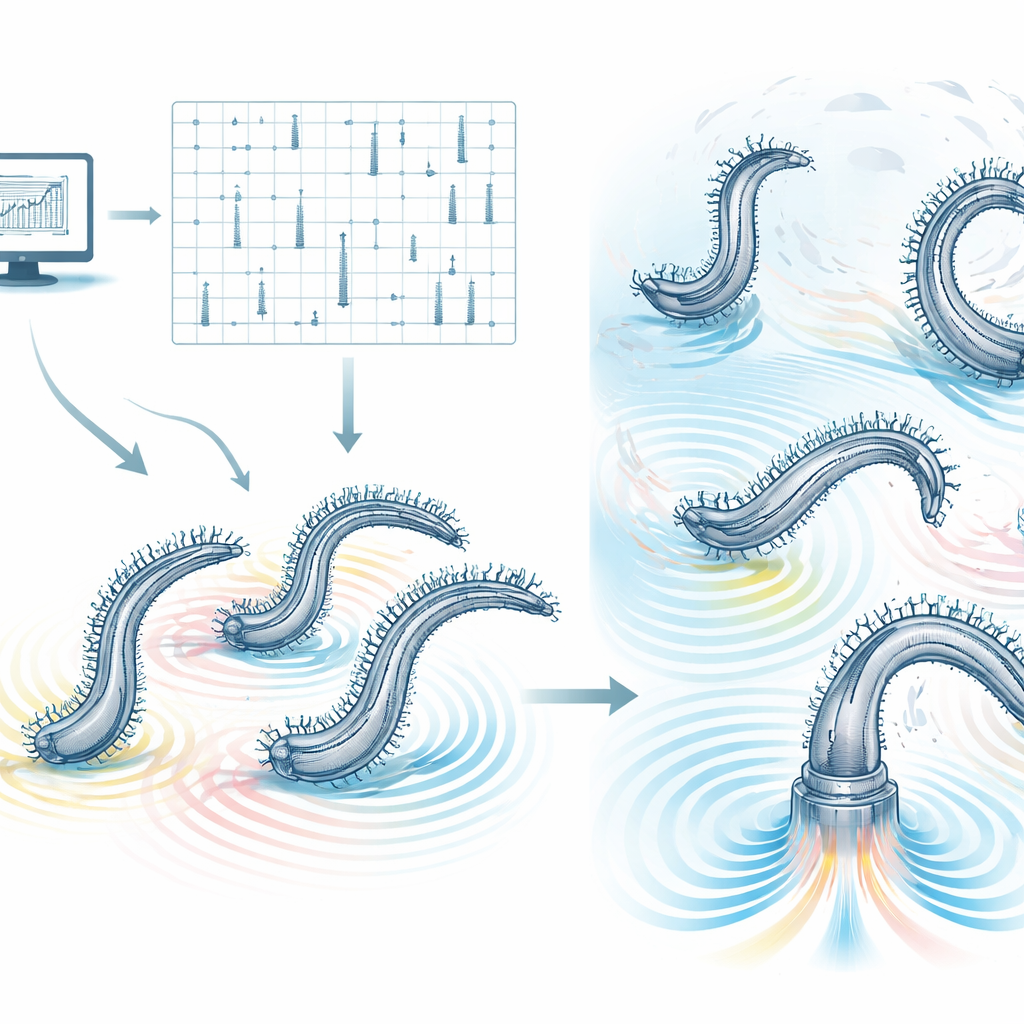
Insegnare ai robot a sintonizzarsi sulle note giuste
Una sfida chiave è che la risposta di ogni piccola struttura al suono dipende in modo molto sensibile dalla sua forma e dimensione esatte. Trovare la geometria giusta per tentativi richiederebbe un numero enorme di simulazioni fisiche e di esperimenti. Per superare questo limite, i ricercatori hanno creato un quadro di machine learning auto-migliorante che apprende il legame tra la geometria del robot e la sua risposta risonante al suono. Hanno prima eseguito un set limitato di simulazioni fisiche dettagliate per misurare come diverse forme di ciglia vibrano e quanto intensamente muovono il fluido circostante. Questi risultati hanno addestrato un modello Random Forest—un tipo di algoritmo capace di catturare sia tendenze lisce sia cambiamenti bruschi—per prevedere la frequenza di risonanza e l’intensità della vibrazione per molti nuovi progetti nello spazio delle possibili geometrie.
Progettazione più rapida con campionamento intelligente
Invece di simulare ogni possibile progetto, il team ha usato un ciclo adattivo: il modello di machine learning prevede le prestazioni, individua dove i suoi stessi errori sono maggiori, e nuove simulazioni vengono aggiunte solo in quelle regioni difficili. Dopo diverse iterazioni, le previsioni del modello per la frequenza di risonanza erano tipicamente entro circa il 2%, e per l’intensità di vibrazione entro circa il 10%, rispetto alle simulazioni complete. Questo approccio ha ridotto i tempi computazionali di oltre centomila volte e i requisiti di memoria di oltre venti volte, pur guidando la progettazione di microrobot efficaci. Di conseguenza, i ricercatori hanno potuto rapidamente trovare geometrie di ciglia che si piegano in una direzione a una certa frequenza sonora e nella direzione opposta a un’altra, o che ruotano più velocemente all’aumentare dell’intensità sonora.
Giunti morbidi per molti diversi movimenti
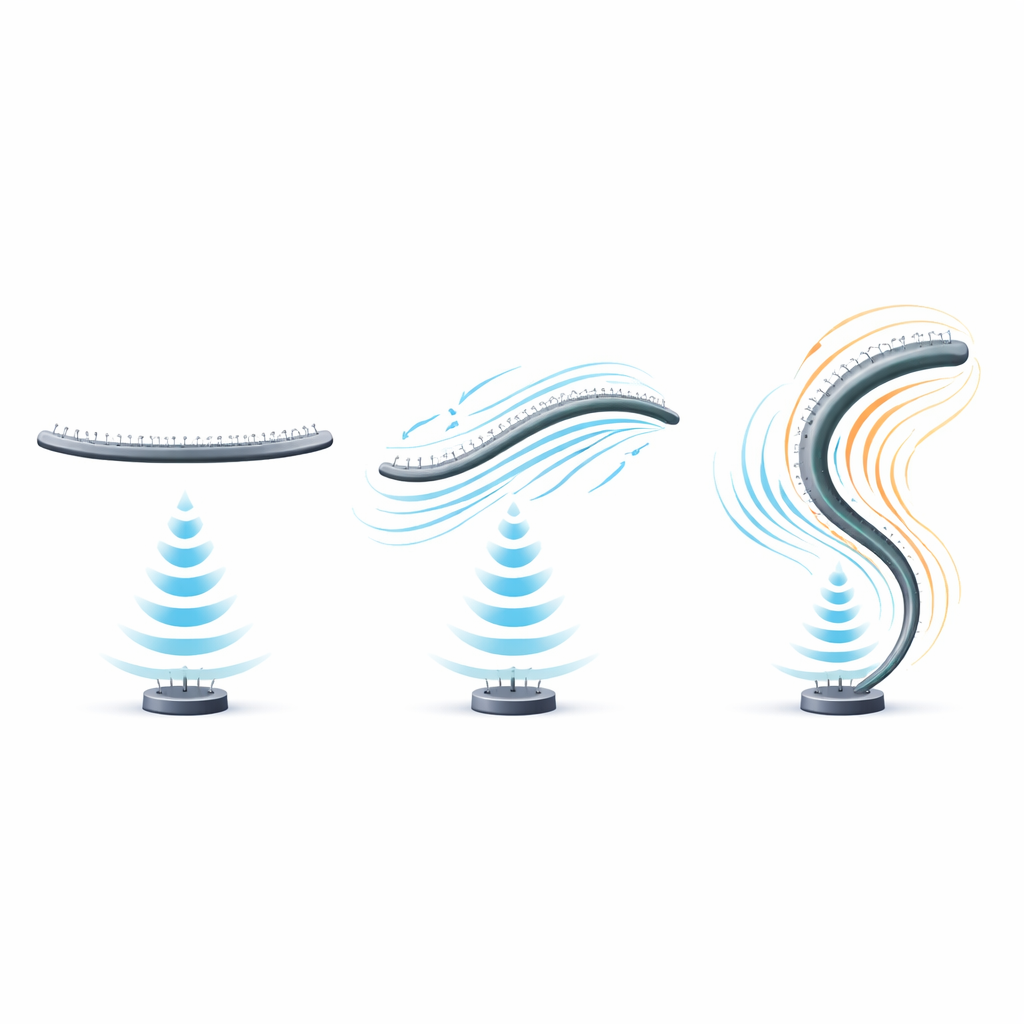
Per dotare gli ECHObot di movimenti ancora più ricchi, il team ha ripreso idee dalla robotica morbida e dai meccanismi compliant—strutture che si flettono invece di articolarsi su giunti rigidi. In una strategia, hanno modificato leggermente la rigidità del materiale lungo i bracci, creando segmenti più morbidi che si piegano più facilmente ma si ripristinano in modo affidabile. In un’altra, hanno stretto certe regioni per farle agire come cerniere sottili e flessibili che permettono grandi piegamenti a bassa potenza, al costo di stress locale più elevato. Usando questi mattoni costruttivi, hanno assemblato forme più complesse come rotori a fiore che girano più velocemente e si avvolgono verso l’interno sotto un suono più intenso, array a cupola che si contraggono in una conchiglia curva, e braccia a più segmenti che possono aprirsi, chiudersi e trasformarsi ripetutamente ritornando vicino alle loro forme originali.
Verso strumenti microscopici adattativi
Complessivamente, questo lavoro dimostra che i microrobot mossi dal suono possono essere progettati per cambiare forma in modi programmabili, reversibili e precisi, anziché limitarsi a spostarsi da un luogo all’altro. Il quadro di machine learning funge da veloce “bussola di progettazione”, indicando agli ingegneri le geometrie che risponderanno come desiderato a frequenze e intensità sonore specifiche. Le strutture morbide e i giunti compliant forniscono i mezzi fisici per un moto quasi vitale su scala microscopica. In futuro, tali ECHObot potrebbero essere adattati a compiti come aprire e chiudere minuscole valvole, miscelare fluidi in dispositivi lab-on-a-chip o manipolare delicatamente particelle e cellule all’interno del corpo, aprendo la strada a micromacchine intelligenti e adattabili per la medicina e la microingegneria.
Citazione: Ling, Y., Lu, Y., Rich, J. et al. Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots. Nat Commun 17, 3870 (2026). https://doi.org/10.1038/s41467-026-70048-4
Parole chiave: microrobot acustici, robotica morbida, ciglia ingegnerizzate, progettazione con machine learning, attivazione su microscala