Clear Sky Science · pl
Projektowanie napędzane uczeniem maszynowym z wykorzystaniem zmodyfikowanych rzęsek umożliwia hybrydowe działania w akustycznych mikrorobotach
Maleńcy pomocnicy w dużych wyzwaniach medycznych
Szpitale coraz częściej polegają na narzędziach, które mogą działać głęboko wewnątrz ciała, tam gdzie skalpele i cewniki mają utrudniony dostęp. W artykule przedstawiono nowy rodzaj mikroskopijnego robota, mniejszego niż ziarenko piasku, który może delikatnie zmieniać kształt pod wpływem fal dźwiękowych. Poprzez połączenie sprytnego projektu, miękkich materiałów i uczenia maszynowego, badacze pokazują, jak te „ECHOboty” mogłyby kiedyś zginać się, skręcać i morfować na zawołanie, by nawigować w ciasnych przestrzeniach, mieszać płyny lub manipulować malutkimi obiektami w zastosowaniach medycznych i laboratoryjnych.
Od prostego ruchu do inteligentnej zmiany kształtu
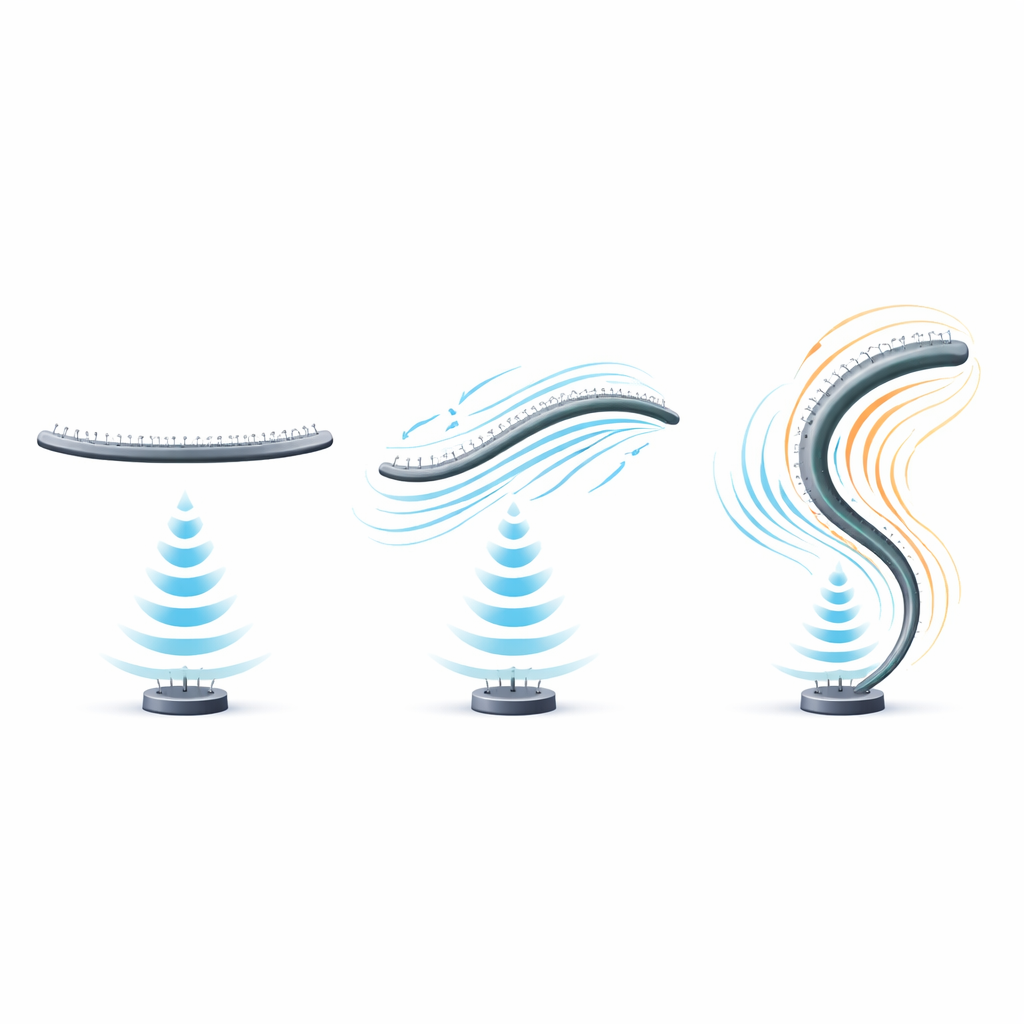
Większość istniejących mikrorobotów potrafi jedynie poruszać się po prostych liniach lub wirować jak maleńkie śmigła, co ogranicza ich możliwości w zatłoczonych, złożonych środowiskach, takich jak naczynia krwionośne czy tkanki. Zespół stojący za tym projektem postanowił zbudować roboty, które nie tylko się przemieszczają, lecz także kontrolowanie zmieniają swoją formę — jak miękka kończyna, która może się otwierać, zamykać i wskazywać w różnych kierunkach. Rozwiązaniem było umieszczenie małych włoskowatych struktur, zwanych zmodyfikowanymi rzęskami, na elastycznych ramionach wykonanych z miękkiego plastiku. Gdy ultradźwięki wprawiają te rzęski w drgania, mieszają otaczający płyn i wytwarzają siły, które zginać i skręcać ramiona. Ta strategia pozwala pojedynczemu mikrorobotowi wykonywać wiele „hybrydowych” działań — od zginania przez obrót po bardziej złożone morfowanie — po prostu przez dostrojenie dźwięku.
Nauka robotów, aby słuchały właściwych tonów
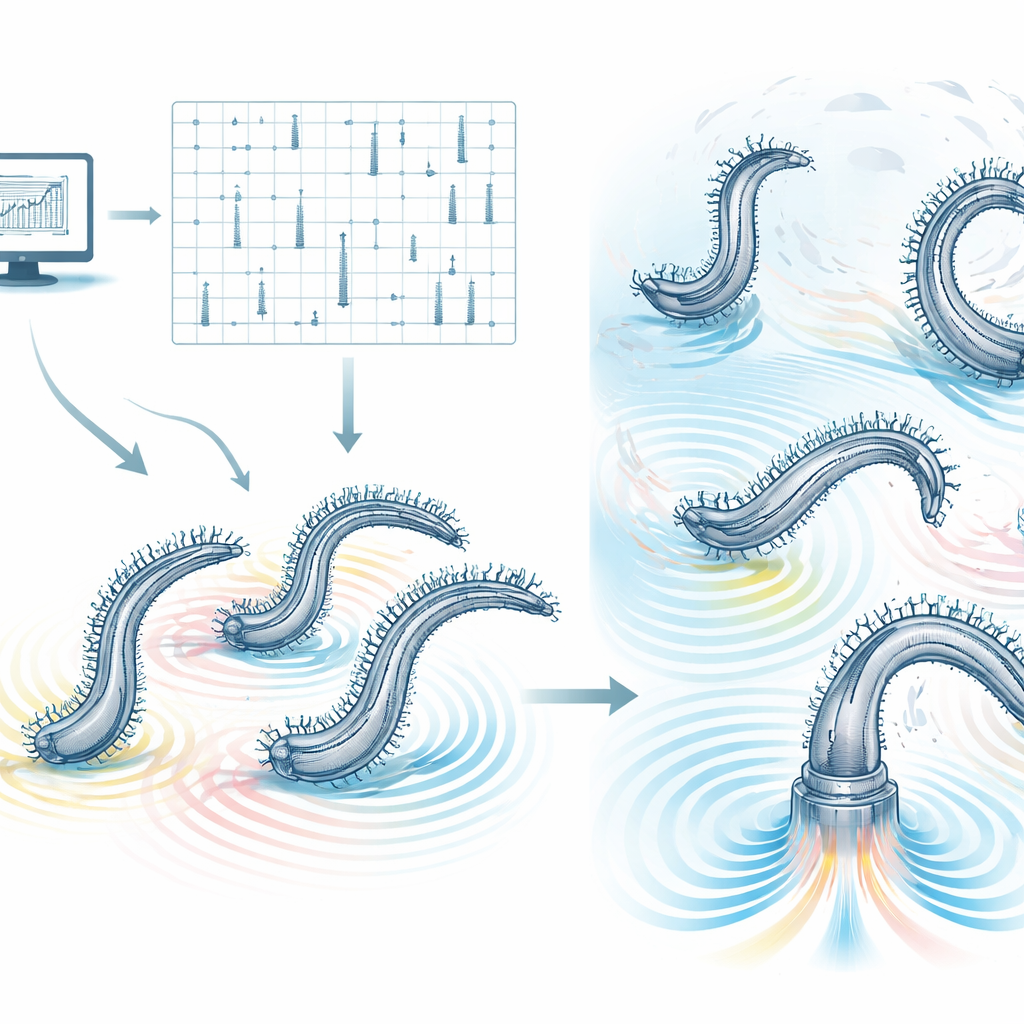
Kluczowym wyzwaniem jest to, że reakcja każdej maleńkiej struktury na dźwięk zależy wrażliwie od jej dokładnego kształtu i rozmiaru. Znalezienie odpowiedniej geometrii metodą prób i błędów wymagałoby ogromnej liczby symulacji komputerowych i eksperymentów. Aby to przezwyciężyć, badacze stworzyli samodoskonalące się ramy uczenia maszynowego, które uczą związku między geometrią robota a jego rezonansową odpowiedzią na dźwięk. Najpierw przeprowadzili ograniczony zestaw szczegółowych symulacji fizycznych, aby zmierzyć, jak różne kształty rzęsek drgają i jak silnie poruszają otaczający płyn. Wyniki te posłużyły do wytrenowania modelu Random Forest — typu algorytmu, który potrafi uchwycić zarówno gładkie trendy, jak i ostre zmiany — do przewidywania częstotliwości rezonansowej i siły drgań dla wielu nowych projektów w przestrzeni projektowej.
Szybsze projektowanie dzięki inteligentnemu próbkowaniu
Zamiast symulować każdy możliwy projekt, zespół zastosował pętlę adaptacyjną: model uczenia maszynowego przewiduje wydajność, następnie mapuje obszary, w których jego własne błędy są największe, a nowe symulacje dodawane są tylko w tych trudnych regionach. Po kilku rundach przewidywania modelu dla częstotliwości rezonansowej zazwyczaj mieściły się w około 2%, a siły drgań w około 10% w porównaniu z pełnymi symulacjami. Podejście to skróciło czas obliczeń ponad sto tysięcy razy i zmniejszyło zapotrzebowanie na pamięć ponad dwudziestokrotnie, jednocześnie prowadząc projektowanie efektywnych mikrorobotów. W efekcie badacze mogli szybko znaleźć geometrie rzęsek, które zginały się w jednym kierunku przy jednej częstotliwości dźwięku, a w przeciwnym przy innej, lub które obracały się szybciej w miarę wzrostu intensywności dźwięku.
Miękkie przeguby dla wielu różnych ruchów
Aby nadać ECHObotom jeszcze bogatszy repertuar ruchów, zespół zapożyczył pomysły z miękkiej robotyki i mechanizmów zgodnych — struktur, które wyginają się zamiast zawiasów na sztywnych stawach. W jednej strategii nieznacznie zmodyfikowali sztywność materiału wzdłuż ramion, tworząc miększe segmenty, które łatwiej się zginają, ale nadal niezawodnie wracają do kształtu. W innej zawężali niektóre obszary, aby działały jak cienkie, elastyczne zawiasy, pozwalające na duże zgięcia przy niskiej mocy, kosztem większych lokalnych naprężeń. Korzystając z tych elementów, złożyli bardziej złożone kształty, takie jak wirniki przypominające kwiaty, które wirują szybciej i zwijają się do środka przy silniejszym dźwięku, układy przypominające kopułę, które kurczą się w powłokę, oraz wielosegmentowe ramiona, które mogą się otwierać, zamykać i wielokrotnie morfować, wracając blisko swoich pierwotnych kształtów.
W kierunku adaptacyjnych mikroskopijnych narzędzi
W sumie praca ta pokazuje, że mikroroboty napędzane dźwiękiem można projektować tak, by zmieniały kształt w sposób programowalny, odwracalny i precyzyjny, zamiast jedynie przemieszczać się z miejsca na miejsce. Ramy uczenia maszynowego pełnią rolę szybkiego „kompasu projektowego”, wskazując inżynierom geometrie, które zareagują zgodnie z oczekiwaniami na konkretne częstotliwości i natężenia dźwięku. Miękkie struktury i zgodne przeguby dostarczają fizycznych środków do realistycznego ruchu na mikroskalę. W przyszłości takie ECHOboty mogłyby być dostosowane do zadań, takich jak otwieranie i zamykanie maleńkich zaworów, mieszanie płynów w urządzeniach lab-on-a-chip lub delikatna manipulacja cząstkami i komórkami wewnątrz ciała, otwierając drogę do inteligentnych, adaptacyjnych mikromaszyn dla medycyny i mikroinżynierii.
Cytowanie: Ling, Y., Lu, Y., Rich, J. et al. Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots. Nat Commun 17, 3870 (2026). https://doi.org/10.1038/s41467-026-70048-4
Słowa kluczowe: akustyczne mikroroboty, miękka robotyka, zmodyfikowane rzęski, projektowanie z użyciem uczenia maszynowego, mikroskalowe aktywowanie