Clear Sky Science · de
Maschinelles Lernen gesteuerte Gestaltung von konstruierten Zilien ermöglicht hybride Operationen in akustischen Mikrorobotern
Kleine Helfer für große medizinische Herausforderungen
Krankenhäuser setzen zunehmend auf Werkzeuge, die tief im Körper arbeiten können, an Stellen, die mit Skalpellen und Kathetern nur schwer erreichbar sind. Dieser Artikel stellt eine neue Art von mikroskopischem Roboter vor, kleiner als ein Sandkorn, der sich durch Schallwellen sanft verformen lässt. Durch die Kombination aus cleverem Design, weichen Materialien und maschinellem Lernen zeigen die Forschenden, wie diese „ECHObots" eines Tages auf Kommando biegen, verdrehen und ihre Form ändern könnten, um sich durch enge Räume zu bewegen, Flüssigkeiten umzurühren oder winzige Objekte in medizinischen und Laboranwendungen zu manipulieren.
Von einfacher Bewegung zu intelligentem Formwandeln
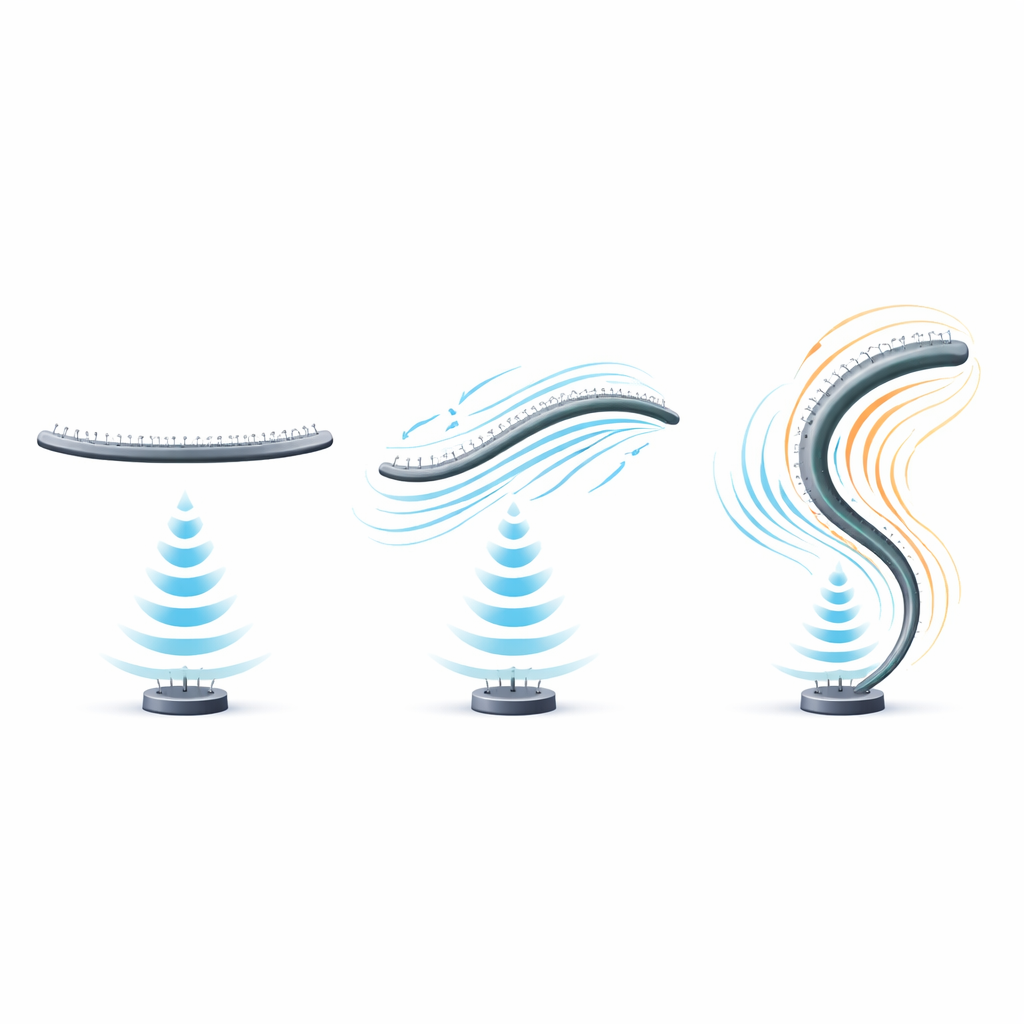
Die meisten existierenden Mikroroboter können sich nur in geraden Linien bewegen oder wie winzige Propeller rotieren, was ihren Einsatz in beengten, komplexen Umgebungen wie Blutgefäßen oder Gewebe einschränkt. Das Team hinter dieser Arbeit wollte Roboter bauen, die sich nicht nur fortbewegen, sondern ihre Form auch gezielt verändern können – wie ein weicher Arm, der sich öffnen, schließen und in verschiedene Richtungen richten lässt. Ihre Lösung besteht darin, kleine haarähnliche Strukturen, sogenannte konstruierte Zilien, an flexiblen Armen aus einem weichen Kunststoff anzubringen. Wenn Ultraschall diese Zilien in Schwingung versetzt, rühren sie die umgebende Flüssigkeit und erzeugen Kräfte, die die Arme biegen und verdrehen. Mit dieser Strategie kann ein einzelner Mikroroboter mehrere „hybride" Aktionen ausführen – vom Biegen über Rotation bis hin zu komplexeren Formänderungen – allein durch Anpassung des Schalls.
Roboter beibringen, die richtigen Töne zu hören
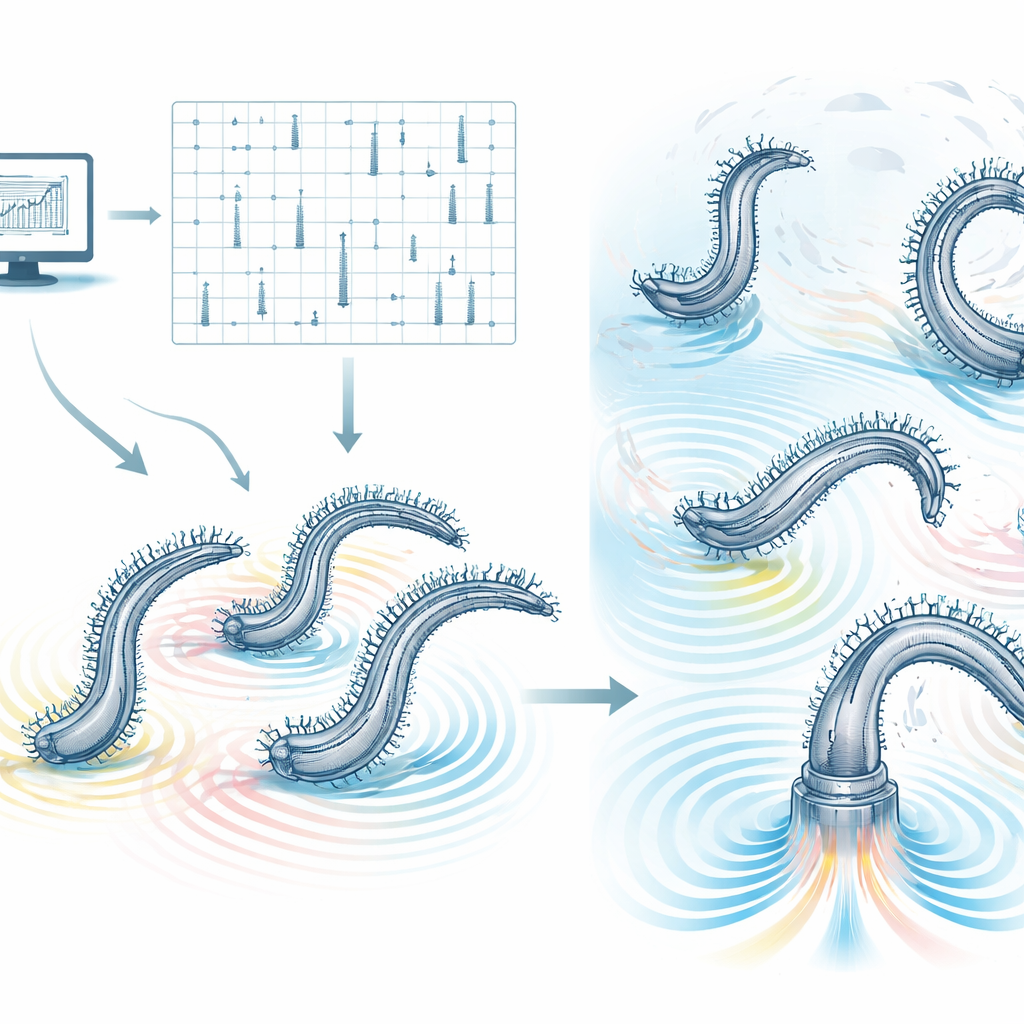
Eine zentrale Herausforderung ist, dass die Reaktion jeder winzigen Struktur auf Schall sehr stark von ihrer genauen Form und Größe abhängt. Die passende Geometrie durch Versuch und Irrtum zu finden, würde eine enorme Anzahl an Computersimulationen und Experimenten erfordern. Um dies zu umgehen, entwickelten die Forschenden einen sich selbst verbessernden Machine-Learning-Rahmen, der die Verbindung zwischen der Geometrie eines Roboters und seiner resonanten Antwort auf Schall erlernt. Zunächst führten sie eine begrenzte Anzahl detaillierter Physiksimulationen durch, um zu messen, wie verschiedene Zilienformen schwingen und wie stark sie die umgebende Flüssigkeit bewegen. Diese Ergebnisse trainierten ein Random-Forest-Modell – einen Algorithmus, der sowohl glatte Trends als auch scharfe Änderungen erfassen kann –, um Resonanzfrequenz und Schwingungsstärke für viele neue Entwürfe im Designraum vorherzusagen.
Schnelleres Design durch intelligentes Sampling
Statt jede mögliche Auslegung zu simulieren, verwendete das Team eine adaptive Schleife: Das Machine-Learning-Modell sagt die Leistung voraus, kartiert dann, wo seine eigenen Fehler am größten sind, und neue Simulationen werden nur in diesen schwierigen Regionen hinzugefügt. Nach mehreren Runden lagen die Vorhersagen des Modells für die Resonanzfrequenz typischerweise innerhalb von etwa 2 %, und die Schwingungsstärke innerhalb von etwa 10 % gegenüber vollständigen Simulationen. Dieser Ansatz verkürzte die Rechenzeit um mehr als das Hunderttausendfache und reduzierte den Speicherbedarf um über das Zwanzigfache, während er dennoch das Design effektiver Mikroroboter leitete. Dadurch konnten die Forschenden schnell Ziliengeometrien finden, die sich bei einer Schallfrequenz in eine Richtung biegen und bei einer anderen in die entgegengesetzte Richtung, oder die bei steigender Schallintensität schneller rotieren.
Weiche Gelenke für vielfältige Bewegungen
Um den ECHObots noch reichhaltigere Bewegungen zu verleihen, übernahmen die Forschenden Ideen aus der weichen Robotik und aus flexiblen Mechanismen – Strukturen, die sich biegen statt an starren Gelenken zu scharnieren. In einer Strategie veränderten sie leicht die Materialsteifigkeit entlang der Arme, sodass weichere Segmente leichter biegen, sich aber dennoch zuverlässig zurückbilden. In einer anderen verengten sie bestimmte Bereiche, die als dünne, flexible Scharniere wirken und große Biegungen bei geringer Leistung erlauben, allerdings auf Kosten höherer lokaler Spannungen. Mit diesen Bausteinen setzten sie komplexere Formen zusammen, wie blütenartige Rotoren, die bei stärkerem Schall schneller drehen und sich einrollen, kuppelförmige Anordnungen, die sich zu einer gewölbten Schale zusammenziehen, und mehrsegmentige Arme, die sich wiederholt öffnen, schließen und formen lassen und zugleich nahe an ihre Ausgangsform zurückkehren.
Auf dem Weg zu adaptiven mikroskopischen Werkzeugen
Insgesamt zeigt diese Arbeit, dass schallgetriebene Mikroroboter so entworfen werden können, dass sie ihre Form programmierbar, reversibel und präzise verändern, statt sich nur von Ort zu Ort zu bewegen. Der Machine-Learning-Rahmen fungiert als schneller „Design-Kompass“, der Ingenieure zu Geometrien führt, die auf bestimmte Schallfrequenzen und -stärken wie gewünscht reagieren. Die weichen Strukturen und nachgiebigen Gelenke liefern die physikalischen Mittel für lebensechte Bewegungen im mikroskopischen Maßstab. In Zukunft könnten solche ECHObots auf Aufgaben zugeschnitten werden wie das Öffnen und Schließen winziger Ventile, das Mischen von Flüssigkeiten in Lab-on-a-Chip-Geräten oder das schonende Manipulieren von Partikeln und Zellen im Körper und damit den Weg zu intelligenten, anpassungsfähigen Mikromaschinen für Medizin und Mikroengineering ebnen.
Zitation: Ling, Y., Lu, Y., Rich, J. et al. Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots. Nat Commun 17, 3870 (2026). https://doi.org/10.1038/s41467-026-70048-4
Schlüsselwörter: akustische Mikroroboter, weiche Robotik, konstruktive Zilien, Design mittels maschinellem Lernen, Mikroskalige Aktuation