Clear Sky Science · es
Diseño impulsado por aprendizaje automático de cilios diseñados permite operaciones híbridas en microrobots acústicos
Pequeños ayudantes para grandes retos médicos
Los hospitales dependen cada vez más de herramientas que puedan operar en lo profundo del cuerpo, donde los bisturíes y catéteres no llegan con facilidad. Este artículo presenta un nuevo tipo de robot microscópico, más pequeño que un grano de arena, que puede cambiar suavemente de forma cuando se activa con ondas sonoras. Combinando diseño ingenioso, materiales blandos y aprendizaje automático, los investigadores muestran cómo estos “ECHObots” podrían un día doblarse, torcerse y transformarse a voluntad para navegar por espacios estrechos, agitar fluidos o manipular objetos diminutos en entornos médicos y de laboratorio.
De un movimiento simple a una transformación inteligente
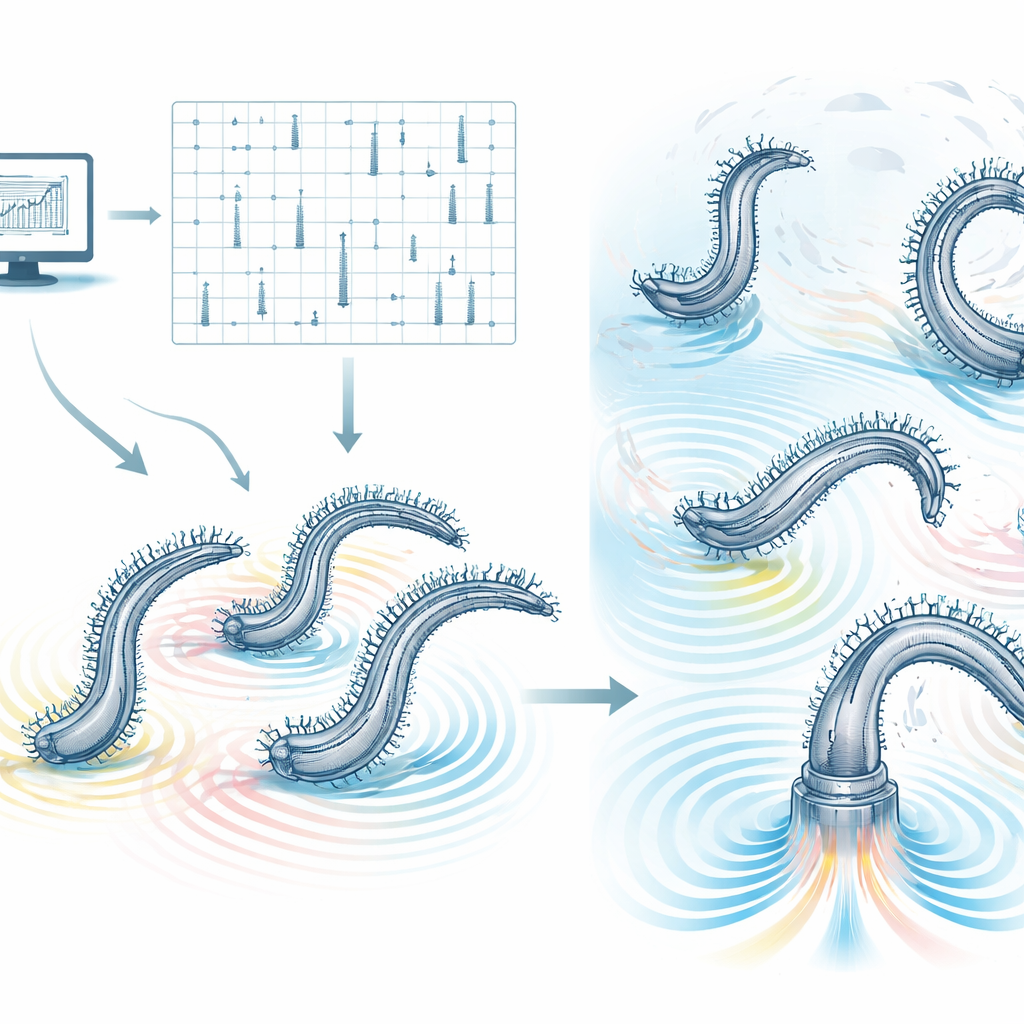
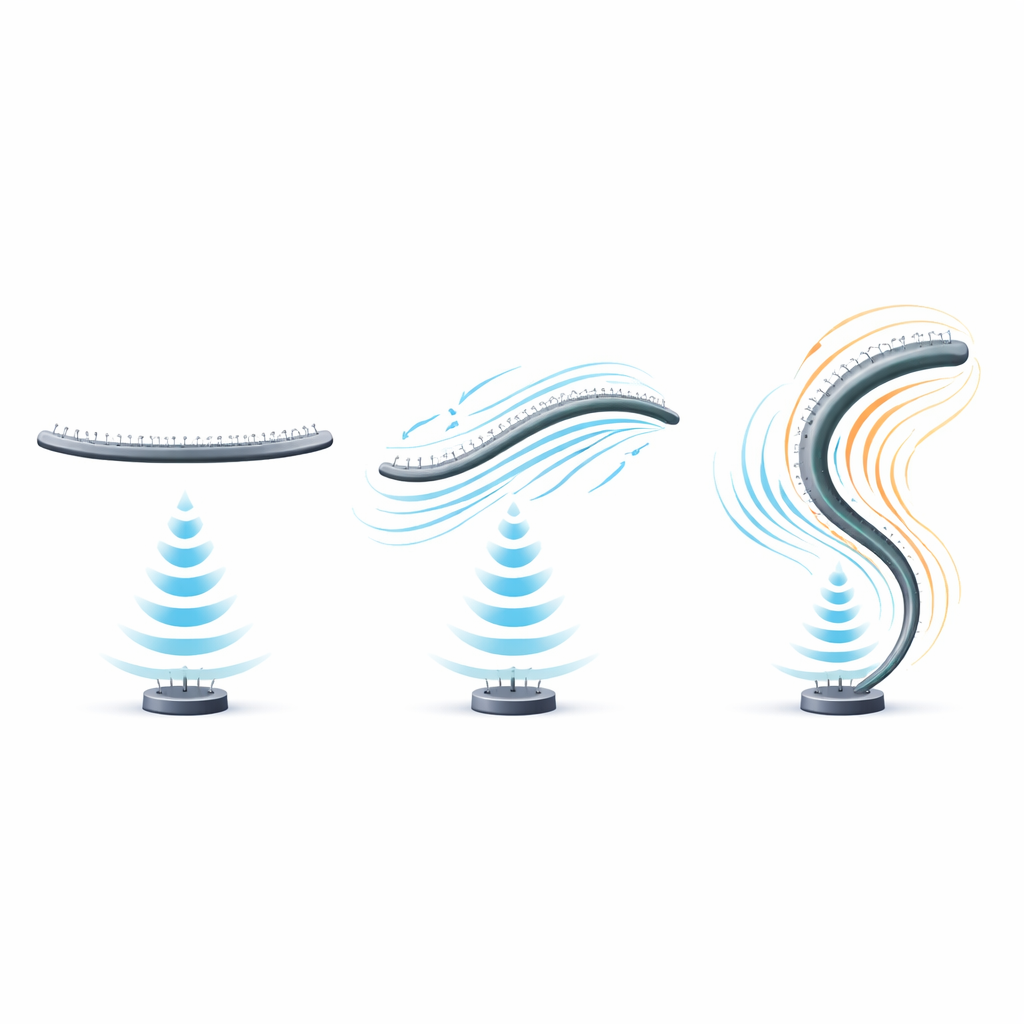
La mayoría de los microrobots existentes solo pueden desplazarse en línea recta o girar como diminutas hélices, lo que limita lo que pueden hacer en entornos concurridos y complejos, como vasos sanguíneos o tejidos. El equipo detrás de este trabajo se propuso construir robots que no solo se muevan, sino que también cambien de forma de manera controlada—como un brazo blando que puede abrirse, cerrarse y apuntar en distintas direcciones. Su solución es fijar pequeñas estructuras similares a pelos, llamadas cilios diseñados, en brazos flexibles hechos de un plástico blando. Cuando el ultrasonido hace vibrar estos cilios, remueven el fluido circundante y generan fuerzas que doblan y retuercen los brazos. Esta estrategia permite que un solo microrobot efectúe múltiples acciones “híbridas”—desde flexiones a rotaciones y morfologías más elaboradas—simplemente ajustando el sonido.
Enseñando a los robots a escuchar las notas adecuadas
Un desafío clave es que la respuesta de cada diminuta estructura al sonido depende de manera muy sensible de su forma y tamaño exactos. Encontrar la geometría correcta por prueba y error requeriría una enorme cantidad de simulaciones por ordenador y experimentos. Para superar esto, los investigadores crearon un marco de aprendizaje automático que se mejora a sí mismo y aprende la relación entre la geometría de un robot y su respuesta resonante al sonido. Primero ejecutaron un conjunto limitado de simulaciones físicas detalladas para medir cómo vibran diferentes formas de cilios y con qué intensidad mueven el fluido circundante. Estos resultados entrenaron un modelo Random Forest—un tipo de algoritmo capaz de capturar tanto tendencias suaves como cambios bruscos—para predecir la frecuencia de resonancia y la intensidad de vibración para muchos diseños nuevos dentro del espacio de diseño.
Diseño más rápido con muestreo inteligente
En lugar de simular cada diseño posible, el equipo usó un lazo adaptativo: el modelo de aprendizaje automático predice el rendimiento, luego localiza dónde sus propios errores son mayores, y se añaden nuevas simulaciones solo en esas regiones difíciles. Tras varias rondas, las predicciones del modelo para la frecuencia de resonancia estaban típicamente dentro de aproximadamente un 2%, y la intensidad de vibración dentro de alrededor del 10%, en comparación con simulaciones completas. Este enfoque redujo el tiempo computacional en más de cien mil veces y recortó las necesidades de memoria en más de veinte veces, a la vez que guiaba el diseño de microrobots efectivos. Como resultado, los investigadores pudieron encontrar rápidamente geometrías de cilios que se doblan en una dirección a una frecuencia sonora y en la dirección opuesta a otra, o que giran más rápido a medida que aumenta la intensidad del sonido.
Articulaciones blandas para múltiples movimientos
Para dotar a los ECHObots de movimientos aún más ricos, el equipo tomó ideas de la robótica blanda y de mecanismos conformes—estructuras que se flexan en lugar de articularse en juntas rígidas. En una estrategia, modificaron ligeramente la rigidez del material a lo largo de los brazos, creando segmentos más blandos que se doblan con mayor facilidad pero que aún recuperan su forma con fiabilidad. En otra, estrecharon ciertas regiones para que actuasen como bisagras delgadas y flexibles que permiten grandes curvaturas con baja potencia, a costa de mayores tensiones locales. Usando estos bloques básicos, montaron formas más complejas como rotores en forma de flor que giran más rápido y se enrollan hacia dentro con sonido más fuerte, arreglos tipo cúpula que se contraen en una carcasa curva, y brazos de múltiples segmentos que pueden abrirse, cerrarse y transformarse repetidamente volviendo casi a sus formas originales.
Hacia herramientas microscópicas adaptativas
En conjunto, este trabajo demuestra que los microrobots impulsados por sonido pueden diseñarse para cambiar de forma de manera programable, reversible y precisa, en lugar de limitarse a desplazarse de un lugar a otro. El marco de aprendizaje automático actúa como una “brújula de diseño” rápida, señalando a los ingenieros las geometrías que responderán como se desea a frecuencias e intensidades sonoras específicas. Las estructuras blandas y las juntas conformes proporcionan los medios físicos para un movimiento casi biológico a escala microscópica. En el futuro, tales ECHObots podrían adaptarse para tareas como abrir y cerrar válvulas diminutas, mezclar fluidos en dispositivos de laboratorio en un chip o manipular con delicadeza partículas y células dentro del cuerpo, abriendo un camino hacia micromáquinas inteligentes y adaptables para la medicina y la microingeniería.
Cita: Ling, Y., Lu, Y., Rich, J. et al. Machine learning–driven design of engineered cilia enables hybrid operations in acoustic microrobots. Nat Commun 17, 3870 (2026). https://doi.org/10.1038/s41467-026-70048-4
Palabras clave: microrobots acústicos, robótica blanda, cilios diseñados, diseño con aprendizaje automático, actuación a microescala