Clear Sky Science · zh
由复合超透镜系统实现的多目标定位与运动跟踪
在三维中观察运动
想象一个微型相机,使无人机不仅能看到若干其他飞行物体的位置,还能以毫米级细节追踪它们在空间中的路径。本研究介绍了这样一款设备,受昆虫复眼启发,并采用最前沿的平面光学技术制造。该设备旨在帮助机器人、无人机和其他机器在繁忙且杂乱的环境中安全、顺畅地导航。
为什么定位很难
在三维中精确找到移动物体的位置信息听起来很简单,但在实践中却出乎意料地困难。诸如 GPS 的无线系统在户外效果很好,但在城市和室内环境中会因信号在墙面反射或被完全阻挡而失去准确性。光学相机可以捕捉精细细节,但标准的单镜头相机会把世界压平为二维,从而难以判断物体的真实远近。经典立体视觉使用两个分开放置的相机通过视差恢复深度,就像人眼那样,但要获得高精度通常需要相机之间较大的物理间隔。这使得这类系统对小型飞行机器人而言笨重且不便。
向昆虫复眼学习
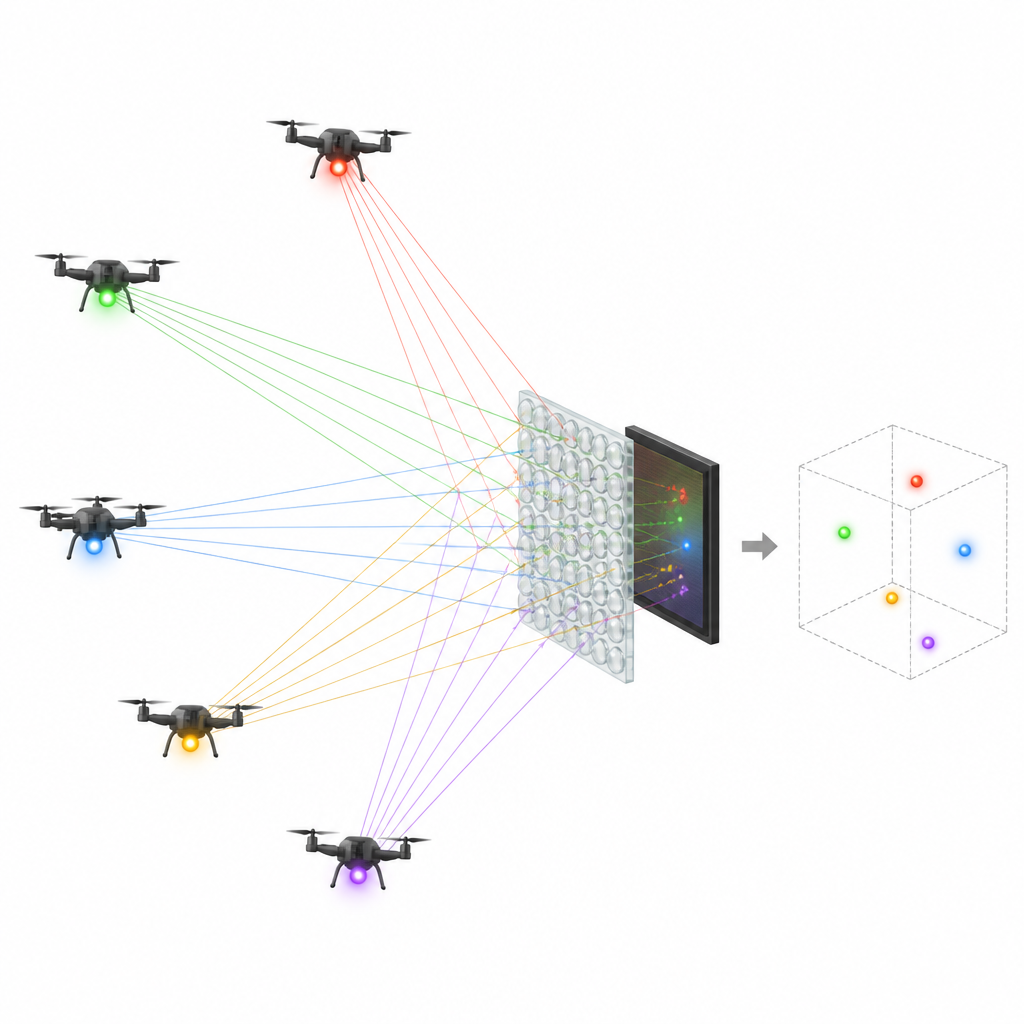
昆虫通过它们的复眼解决了相关问题:复眼由许多小单元组成,每个单元朝向略有不同。研究团队借鉴了这一思想,提出了所谓的复合超透镜系统。与弯曲的生物单元不同,他们在平面光传感器上方排列了一格格微小的平面透镜,称为金属透镜。每个微透镜都充当一个子眼:来自发光目标(例如安装在无人机上的红外信标)的光被聚焦到传感器上的一个清晰光斑。由于这些子眼在空间上彼此分离并从略微不同角度观察目标,光斑的分布模式包含了目标在三维空间中位置信息。
将微小位移转换为三维地图
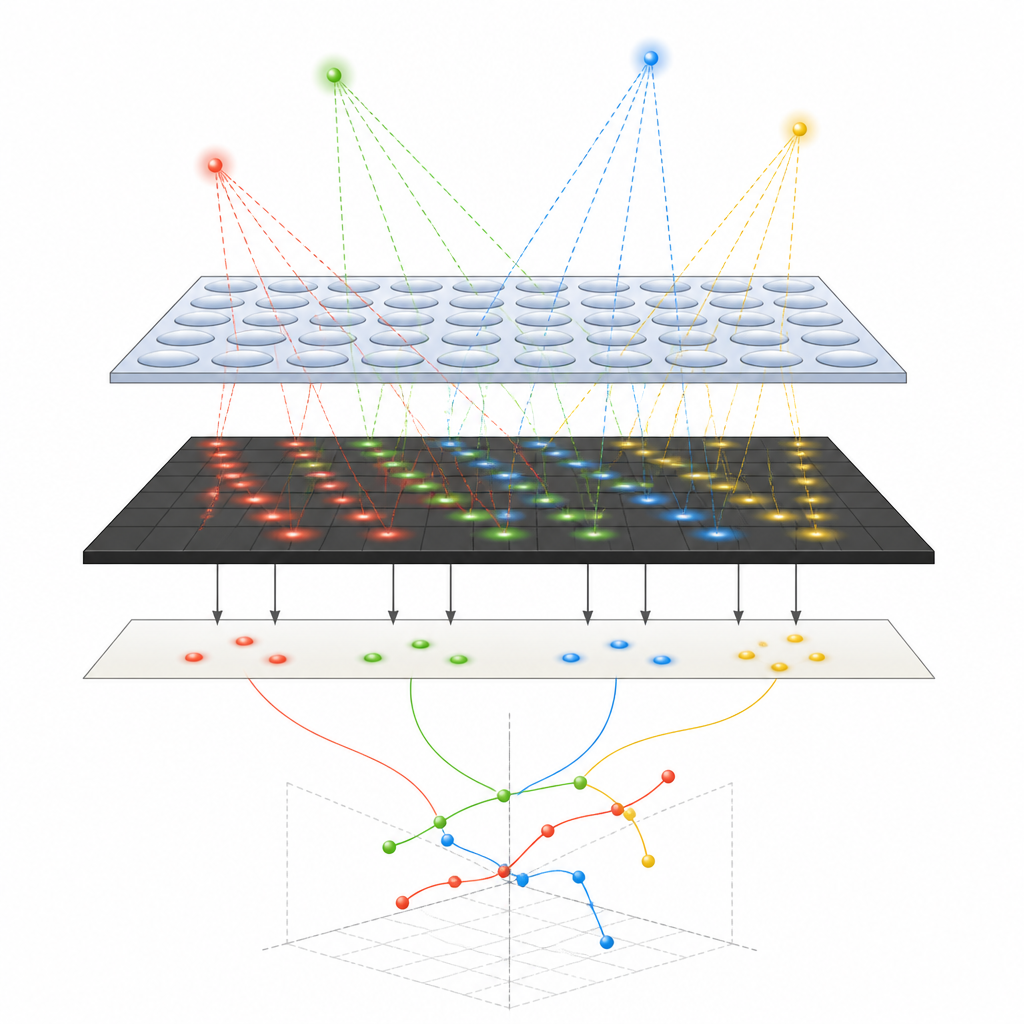
该系统的核心是一种将这些光斑之间间距转换为精确位置估计的数学方法。团队并非仅依赖少数子眼对,而是采用一种全局比率算法,将阵列中每一对子眼的视差信息结合起来。这种平均化方法减少了随机噪声并提高了深度精度。在实验中,研究人员构建了一个原型:一个由 3×3 金属透镜组成的网格,每个透镜仅 1.6 毫米宽,置于高分辨率红外传感器之上。他们证明了单个发光目标可以在距设备一米范围内被定位,深度误差低于 2%,即便目标在若干已知距离之间移动时亦如此。
同时跟踪多个运动目标
为展示系统处理真实运动的能力,团队使用可编程显示器创建了一个多目标模拟器。屏幕上的亮点代表数架无人机,沿着直线、曲线和字母形状移动。复合超透镜为每个亮点记录了一组光斑,算法随时间对这些光斑组进行聚类与跟踪。经过一次性校准以修正轻微的机械错位后,系统能够同时重建多达四个目标的三维轨迹。在包括直线、圆形及更复杂形状的多次测试中,重建轨迹与真实轨迹的误差均小于 2%,典型偏差小于 0.5 毫米。
小传感器,大可能
由于所有组件都被封装在一层薄薄的平面透镜和探测器堆栈中,复合超透镜既紧凑又能提供高精度。研究人员认为,该设计可以扩展以覆盖更宽的视角、处理更多目标,甚至识别目标形状而不只是位置。随着进一步发展和自动化校准,这类传感器可助力无人机群保持队形飞行,使机器人能在拥挤房间中安全穿行,并为具身智能体提供一种快速、可靠的方式来感知周围多个物体的位置。
引用: Zhang, L., Zhang, L., Zhao, X. et al. Multi-target positioning and motion tracking enabled by a compound meta-eye system. Microsyst Nanoeng 12, 203 (2026). https://doi.org/10.1038/s41378-026-01319-9
关键词: 3D定位, 运动跟踪, 金属透镜, 复合眼, 无人机导航