Clear Sky Science · de
Multi-Target-Positionierung und Bewegungserfassung ermöglicht durch ein zusammengesetztes Meta-Auge-System
Bewegung in drei Dimensionen sehen
Stellen Sie sich eine winzige Kamera vor, mit der eine Drohne nicht nur erkennt, wo mehrere andere Flugobjekte sind, sondern auch ihre Bahnen im Raum mit millimetergenauer Präzision nachverfolgt. Diese Studie stellt genau ein solches Gerät vor, das von Insektenaugen inspiriert ist und mit moderner Flachoptik gebaut wurde. Es soll Robotern, Drohnen und anderen Maschinen helfen, sich in dichten, unübersichtlichen Umgebungen sicher und zuverlässig zu bewegen.
Warum Positionsbestimmung schwierig ist
Die exakte Bestimmung der Position bewegter Objekte in drei Dimensionen klingt unkompliziert, ist in der Praxis aber überraschend knifflig. Funksysteme wie GPS funktionieren im Freien gut, verlieren jedoch in Städten und Innenräumen an Genauigkeit, wo Signale von Wänden reflektiert oder ganz blockiert werden. Optische Kameras erfassen feine Details, doch Standard-Einzellinsen-Kameras reduzieren die Welt auf zwei Dimensionen, sodass Entfernungen schwer abzuschätzen sind. Klassische Stereovision verwendet zwei voneinander getrennte Kameras, um Tiefe aus Parallaxe zu gewinnen, ähnlich dem menschlichen Sehen, doch für hohe Genauigkeit ist oft ein großer Abstand zwischen den Kameras nötig. Das macht solche Systeme für kleine Flugroboter unhandlich und sperrig.
Vom Insektenauge lernen
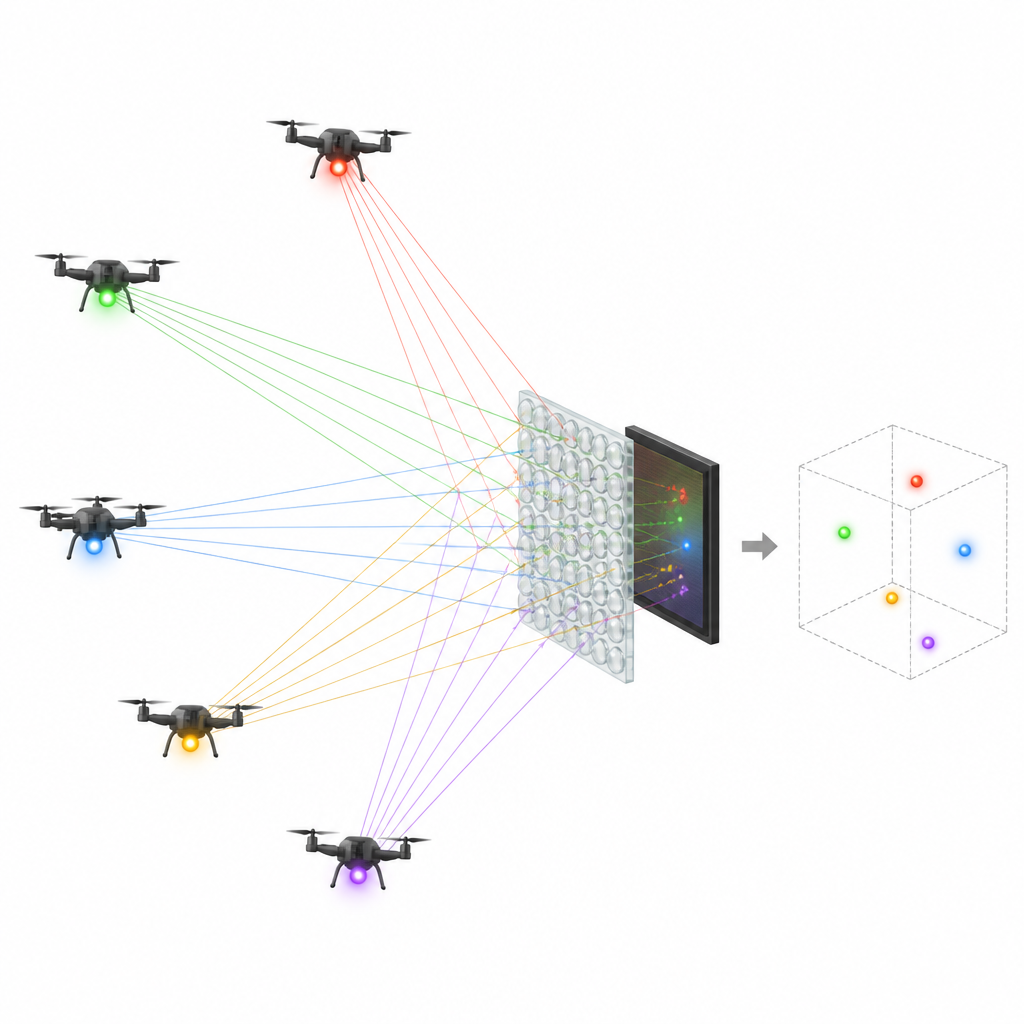
Insekten lösen ein verwandtes Problem mit ihren Facettenaugen, die aus vielen kleinen Einheiten bestehen, von denen jede in eine etwas andere Richtung blickt. Die Forscher übertrugen diese Idee auf ihr sogenanntes zusammengesetztes Meta-Auge-System. Anstelle gekrümmter biologischer Elemente platzierten sie ein Gitter winziger, flacher Linsen — sogenannter Metallinsen — über einem flachen Lichtsensor. Jede Mini-Linse fungiert als Unterauge: Licht von einer leuchtenden Quelle, etwa einer Infrarotmarkierung an einer Drohne, wird zu einem scharfen Fleck auf dem Sensor fokussiert. Da die Unteraugen räumlich getrennt sind und das Ziel aus leicht unterschiedlichen Winkeln sehen, enthält das Muster der Flecken Informationen darüber, wo sich das Ziel dreidimensional befindet.
Kleine Verschiebungen in 3D-Karten verwandeln
Der Kern des Systems ist ein mathematisches Verfahren, das die Abstände zwischen all diesen Flecken in eine präzise Positionsschätzung umwandelt. Anstatt sich nur auf wenige Paare von Unteraugen zu stützen, verwendet das Team einen Global-Ratio-Algorithmus, der Parallaxinformationen aus jedem Paar von Unteraugen im Array kombiniert. Dieser Mittelungsansatz reduziert Zufallsrauschen und verbessert die Tiefengenauigkeit. In Tests bauten die Forscher einen Prototyp mit einem 3x3-Gitter aus Metallinsen, jede nur 1,6 Millimeter breit, platziert über einem hochauflösenden Infrarotsensor. Sie zeigten, dass eine einzelne lichtemittierende Quelle innerhalb eines Meters Entfernung vom Gerät mit einem Tiefenfehler von weniger als zwei Prozent lokalisiert werden konnte, selbst wenn das Ziel zwischen mehreren bekannten Distanzen bewegt wurde.
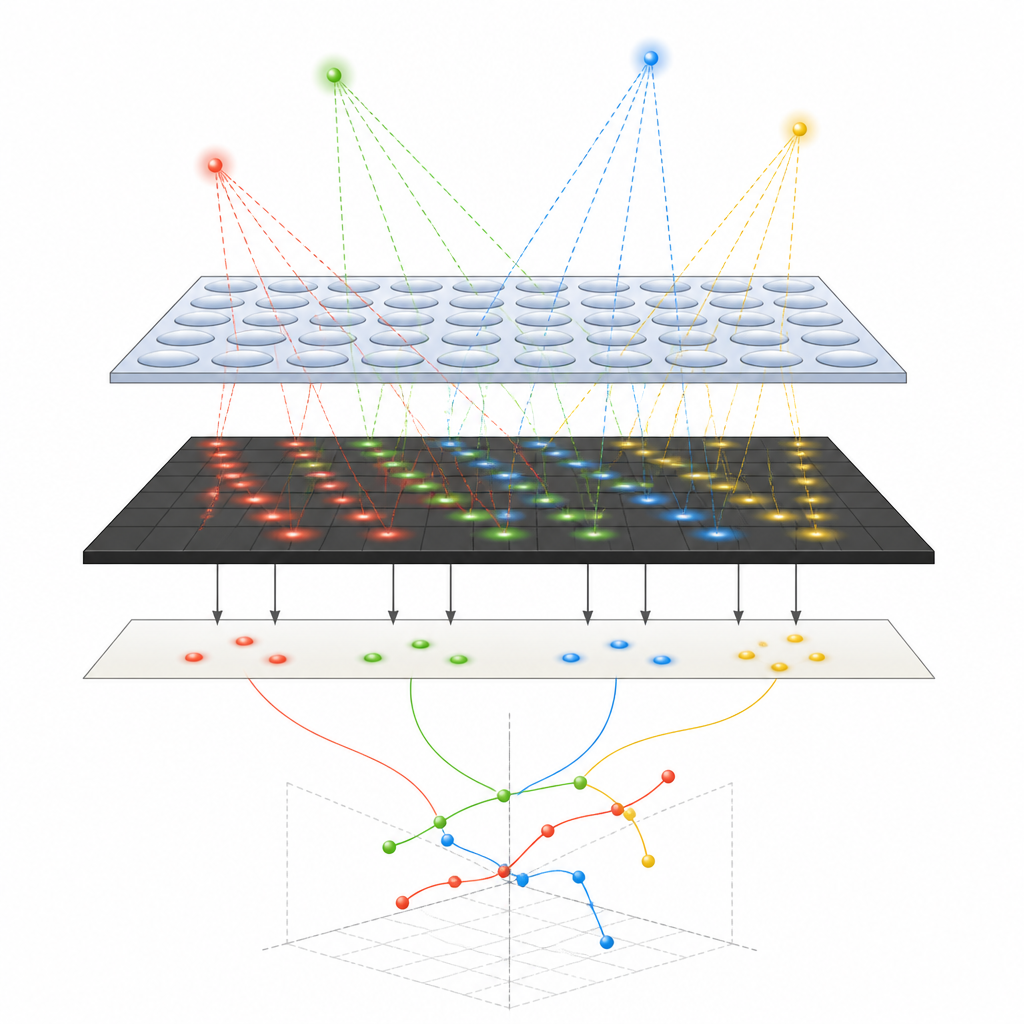
Viele bewegte Ziele gleichzeitig verfolgen
Um zu zeigen, dass ihr System mit realer Bewegung umgehen kann, erstellte das Team einen Multi-Target-Simulator mit einem programmierbaren Display. Helle Punkte auf dem Bildschirm standen für mehrere Drohnen, die sich entlang gerader, gekrümmter und buchstabenförmiger Bahnen bewegten. Das zusammengesetzte Meta-Auge zeichnete für jeden hellen Punkt ein Array von Flecken auf, und der Algorithmus gruppierte und verfolgte diese Arrays über die Zeit. Nach einem einmaligen Kalibriervorgang zur Korrektur kleiner mechanischer Fehlausrichtungen konnte das System die dreidimensionalen Bahnen von bis zu vier Zielen gleichzeitig rekonstruieren. In zahlreichen Tests — einschließlich Geraden, Kreisen und komplexeren Formen — weichten die rekonstruierten Trajektorien weniger als zwei Prozent von den tatsächlichen ab, mit typischen Abweichungen von unter einem halben Millimeter.
Kleiner Sensor, große Möglichkeiten
Weil alles in einen dünnen Stapel flacher Linsen und einen Detektor gepackt ist, bleibt das zusammengesetzte Meta-Auge kompakt, bietet dabei aber hohe Präzision. Die Forscher argumentieren, dass das Design skalierbar ist, um größere Sichtfelder abzudecken, mehr Ziele zu handhaben und sogar die Erkennung der Zielgestalt zusätzlich zur Position zu ermöglichen. Mit weiterer Entwicklung und automatisierter Kalibrierung könnten solche Sensoren Schwärmen von Drohnen beim Formationsflug helfen, Robotern ein sicheres Navigieren durch überfüllte Räume ermöglichen und verkörperten intelligenten Agenten ein schnelles, zuverlässiges Gespür dafür geben, wo sich viele Objekte in ihrer Umgebung befinden.
Zitation: Zhang, L., Zhang, L., Zhao, X. et al. Multi-target positioning and motion tracking enabled by a compound meta-eye system. Microsyst Nanoeng 12, 203 (2026). https://doi.org/10.1038/s41378-026-01319-9
Schlüsselwörter: 3D-Positionierung, Bewegungsverfolgung, Metallinse, zusammengesetztes Auge, Drohnen-Navigation