Clear Sky Science · fr
Positionnement multi-cibles et suivi de mouvement permis par un système composé de méta-yeux
Voir le mouvement en trois dimensions
Imaginez une minuscule caméra qui permettrait à un drone non seulement de localiser plusieurs autres objets volants, mais aussi de retracer leurs trajectoires dans l’espace avec un détail à l’échelle du millimètre. Cette étude présente justement un tel dispositif, inspiré des yeux d’insectes et réalisé avec des optiques plates de pointe. Il est conçu pour aider robots, drones et autres machines à naviguer en sécurité et en douceur dans des environnements encombrés et animés.
Pourquoi déterminer une position est difficile
Trouver la position exacte d’objets en mouvement dans les trois dimensions peut sembler simple, mais c’est étonnamment complexe en pratique. Les systèmes radio comme le GPS fonctionnent bien en extérieur mais perdent en précision en milieu urbain ou en intérieur, où les signaux rebondissent sur les murs ou sont complètement bloqués. Les caméras optiques capturent des détails fins, mais une caméra classique à objectif unique aplatit le monde en deux dimensions, rendant difficile l’estimation de la distance réelle. La vision stéréoscopique classique utilise deux caméras espacées pour retrouver la profondeur par parallaxe, comme le font les yeux humains, mais obtenir une grande précision exige généralement un grand écart physique entre les caméras. Cela rend ces systèmes encombrants et peu adaptés aux petits robots volants.
S’inspirer des yeux d’insectes
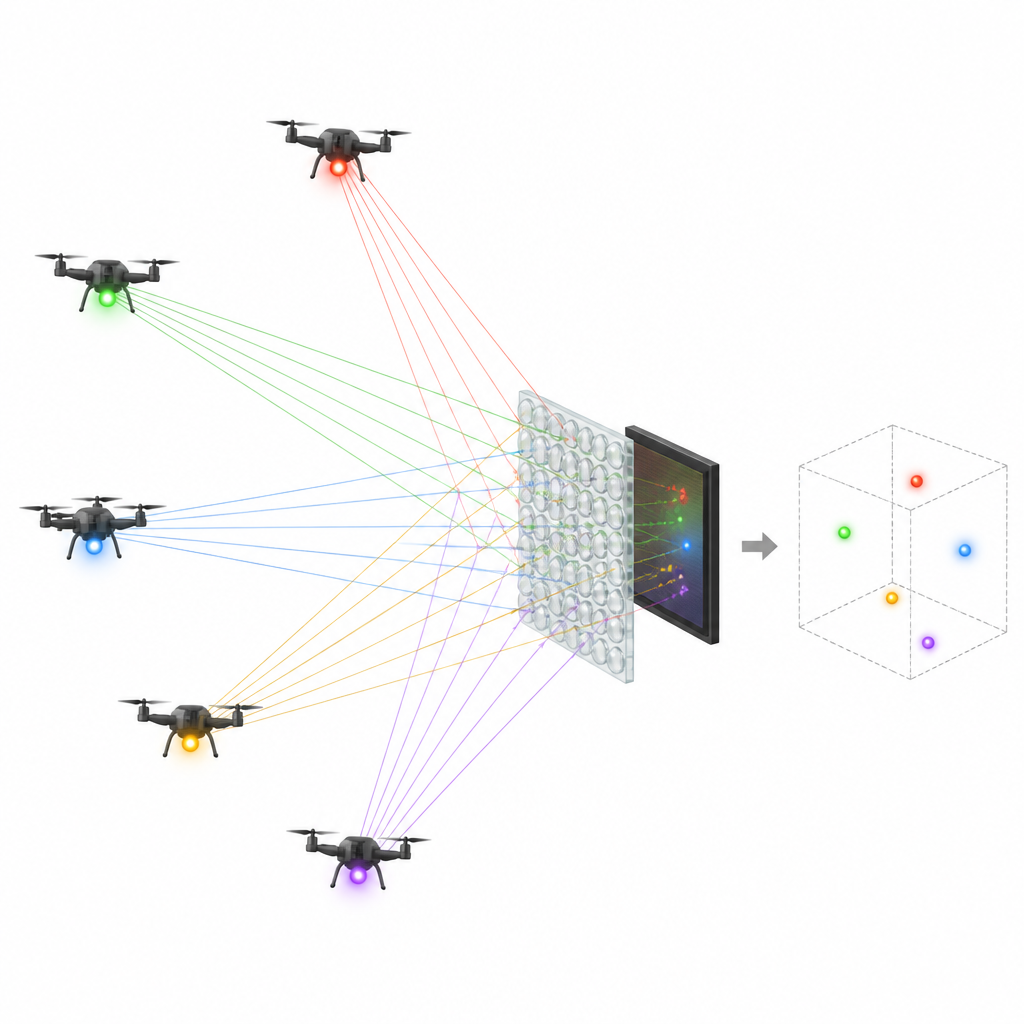
Les insectes résolvent un problème apparenté avec leur œil composé, qui se compose de nombreuses unités petites, chacune regardant dans une direction légèrement différente. Les chercheurs ont reproduit cette idée avec ce qu’ils appellent un système de méta-œil composé. Au lieu d’unités biologiques courbes, ils ont disposé une grille de petites lentilles plates, appelées métallentilles, au-dessus d’un capteur plat. Chaque mini-lentille joue le rôle d’un sous-œil : la lumière provenant d’une cible lumineuse, comme une balise infrarouge sur un drone, est focalisée en une tache nette sur le capteur. Parce que les sous-œils sont séparés dans l’espace et voient la cible sous des angles légèrement différents, le motif de taches contient des informations sur la position de la cible en trois dimensions.
Transformer de petits décalages en cartes 3D
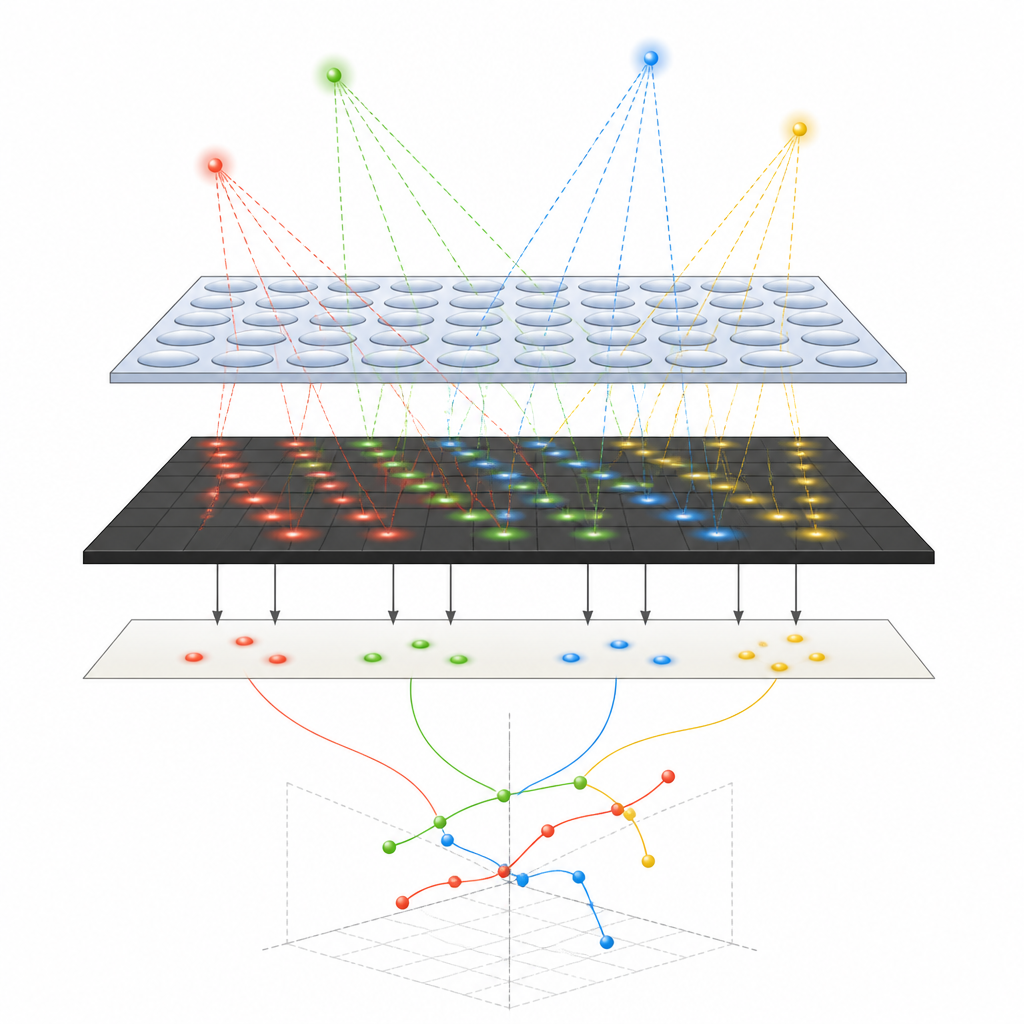
Le cœur du système est une méthode mathématique qui convertit les espacements entre toutes ces taches en une estimation de position précise. Plutôt que de s’appuyer sur quelques paires de sous-yeux, l’équipe utilise un algorithme de rapport global qui combine l’information de parallaxe de chaque paire de sous-yeux du réseau. Cette approche par moyennage réduit le bruit aléatoire et améliore la précision en profondeur. Lors des tests, les chercheurs ont construit un prototype avec une grille trois par trois de métallentilles, chacune d’à peine 1,6 millimètre de diamètre, placée au-dessus d’un capteur infrarouge à haute résolution. Ils ont montré qu’une source lumineuse unique pouvait être localisée à l’intérieur d’un mètre autour de l’appareil avec une erreur de profondeur inférieure à deux pour cent, même lorsque la cible était déplacée entre plusieurs distances connues.
Suivre plusieurs cibles en mouvement simultanément
Pour démontrer que leur système peut gérer des mouvements réels, l’équipe a créé un simulateur multi-cibles à l’aide d’un écran programmable. Des taches lumineuses à l’écran représentaient plusieurs drones se déplaçant le long de trajectoires droites, courbes et en forme de lettres. Le méta-œil composé a enregistré un réseau de taches pour chaque point lumineux, et l’algorithme a groupé et suivi ces réseaux au fil du temps. Après une étape de calibration unique pour corriger de légers désalignements mécaniques, le système a pu reconstruire les trajectoires tridimensionnelles jusqu’à quatre cibles simultanément. Sur de nombreux tests, incluant lignes droites, cercles et formes plus complexes, les trajectoires reconstruites différaient des trajectoires réelles de moins de deux pour cent, avec des écarts typiques inférieurs à un demi-millimètre.
Petit capteur, grandes possibilités
Parce que tout est compacté dans une pile mince de lentilles plates et d’un détecteur, le méta-œil composé reste compact tout en offrant une grande précision. Les chercheurs soutiennent que le design peut être étendu pour couvrir des angles de vue plus larges, gérer davantage de cibles et même reconnaître la forme des cibles, pas seulement leur position. Avec un développement supplémentaire et une calibration automatisée, de tels capteurs pourraient aider des essaims de drones à voler en formation, permettre à des robots de se faufiler en toute sécurité dans des pièces encombrées, et fournir aux agents intelligents incarnés un sens rapide et fiable de l’emplacement de nombreux objets dans leur environnement.
Citation: Zhang, L., Zhang, L., Zhao, X. et al. Multi-target positioning and motion tracking enabled by a compound meta-eye system. Microsyst Nanoeng 12, 203 (2026). https://doi.org/10.1038/s41378-026-01319-9
Mots-clés: positionnement 3D, suivi de mouvement, métalentille, œil composé, navigation de drone