Clear Sky Science · sv
Flermålspositionering och rörelsespårning möjliggjord av ett sammansatt meta-öga
Att se rörelse i tre dimensioner
Föreställ dig en liten kamera som låter en drönare inte bara se var flera andra flygande föremål befinner sig, utan också följa deras banor i rummet med millimeternoggrannhet. Denna studie presenterar just en sådan enhet, inspirerad av insekters ögon och byggd med modern plattoptik. Den är utformad för att hjälpa robotar, drönare och andra maskiner att navigera i trånga, röriga miljöer på ett säkert och smidigt sätt.
Varför positionsbestämning är svårt
Att hitta den exakta positionen för rörliga objekt i tre dimensioner kan låta enkelt, men är förvånansvärt svårt i praktiken. Radiosystem som GPS fungerar bra utomhus men tappar noggrannhet i städer och inomhus där signaler studsar mot väggar eller blockeras helt. Optiska kameror kan fånga fin detalj, men standardkameror med en lins plattar till världen i två dimensioner, vilket gör det svårt att avgöra hur långt bort saker verkligen är. Klassisk stereovision använder två kameror med ett mellanrum för att återfå djup genom parallax, ungefär som människans ögon, men för att nå hög noggrannhet krävs ofta ett stort avstånd mellan kamerorna. Det gör sådana system klumpiga och opraktiska för kompakta flygande robotar.
Lära av insekters ögon
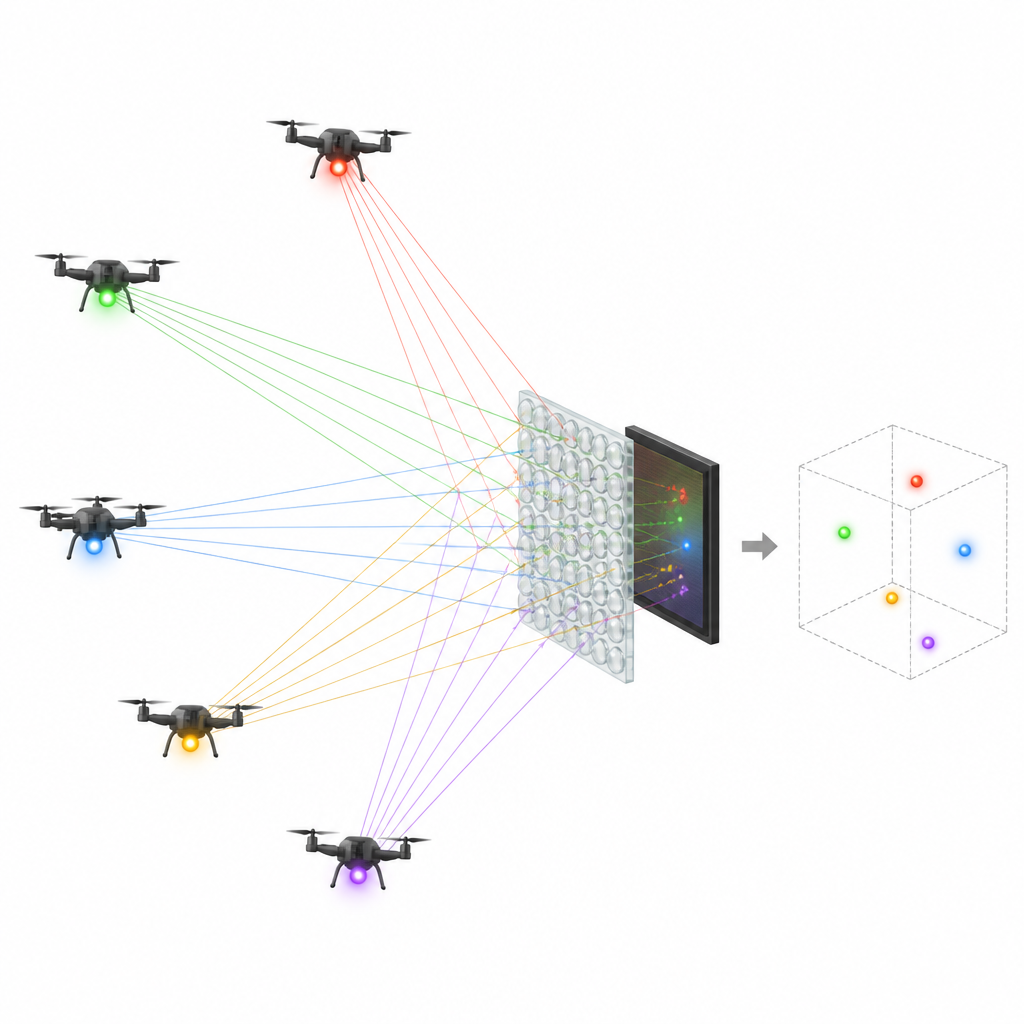
Insekter löser ett liknande problem med sina sammansatta ögon, som består av många små enheter där varje enhet tittar i en något annan riktning. Forskarna efterliknade denna idé med vad de kallar ett sammansatt meta-öga. Istället för de kurvade biologiska enheterna arrangerade de ett rutnät av små, platta linser, kända som metalens, ovanpå en platt ljussensor. Varje mini-lins fungerar som ett sub-öga: ljus från ett ljust mål, till exempel en infraröd beacon på en drönare, fokuseras till en skarp fläck på sensorn. Eftersom sub-ögonen är separerade i rummet och ser målet ur något olika vinklar, innehåller mönstret av fläckar information om var målet befinner sig i tre dimensioner.
Att omvandla små förskjutningar till 3D-kartor
Kärnan i systemet är en matematisk metod som omvandlar avstånden mellan alla dessa fläckar till en precis positionsuppskattning. Istället för att förlita sig på bara några par sub-ögon använder teamet en global-förhållandealgoritm som kombinerar parallaxinformation från varje par sub-ögon i arrayen. Detta genomsnittsförfarande minskar slumpmässigt brus och förbättrar djupnoggrannheten. I tester byggde forskarna en prototyp med ett tre gånger tre-rutnät av metalens, vardera endast 1,6 millimeter över, placerade ovanpå en högupplöst infraröd sensor. De visade att ett enda ljusutstrålande mål kunde lokaliseras inom en meter från enheten med ett djupfel på mindre än två procent, även när målet förflyttades mellan flera kända avstånd.
Att följa många rörliga mål samtidigt
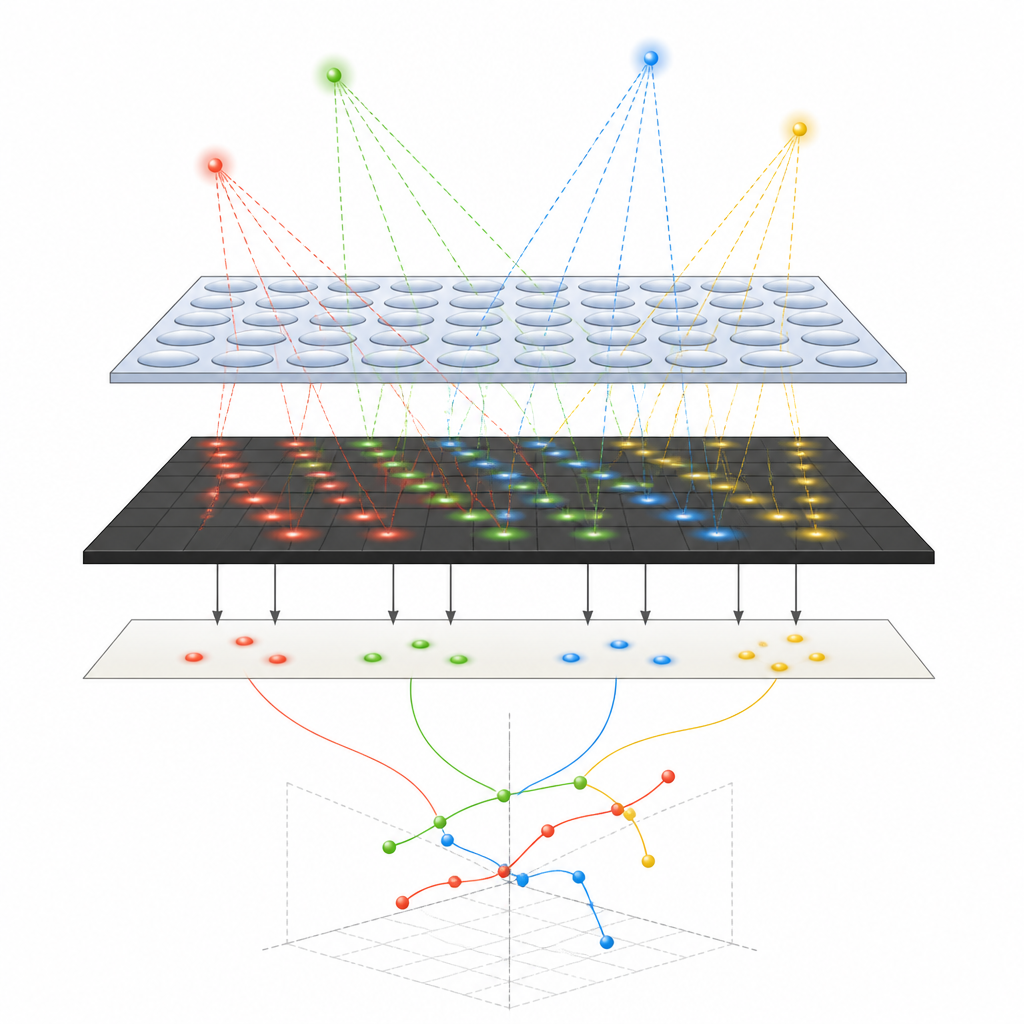
För att visa att deras system kan hantera verklig rörelse skapade teamet en multimåls-simulator med en programmerbar skärm. Ljusa punkter på skärmen stod för flera drönare som rörde sig längs raka, kurviga och bokstavsformade banor. Det sammansatta meta-ögat registrerade en matris av fläckar för varje ljuspunkt, och algoritmen grupperade och spårade dessa matriser över tid. Efter en engångskalibrering för att korrigera små mekaniska feljusteringar kunde systemet rekonstruera tredimensionella banor för upp till fyra mål samtidigt. I många tester, inklusive räta linjer, cirklar och mer komplexa former, skilde sig de rekonstruerade banorna från de verkliga med mindre än två procent, med typiska avvikelser mindre än en halv millimeter.
Liten sensor, stora möjligheter
Eftersom allt är packat i en tunn stapel av platta linser och en detektor förblir det sammansatta meta-ögat kompakt samtidigt som det erbjuder hög precision. Forskarna menar att designen kan skalas upp för att täcka bredare synfält, hantera fler mål och till och med lägga till igenkänning av målens form, inte bara position. Med vidare utveckling och automatiserad kalibrering skulle sådana sensorer kunna hjälpa svärmar av drönare att flyga i formation, göra det möjligt för robotar att slingra sig säkert genom trånga rum och ge förkroppsligade intelligenta agenter en snabb, pålitlig uppfattning om var många objekt befinner sig i deras omgivning.
Citering: Zhang, L., Zhang, L., Zhao, X. et al. Multi-target positioning and motion tracking enabled by a compound meta-eye system. Microsyst Nanoeng 12, 203 (2026). https://doi.org/10.1038/s41378-026-01319-9
Nyckelord: 3D-positionering, rörelsespårning, metalens, sammansatt öga, drönarnavigation