Clear Sky Science · pt
Posicionamento multi-alvo e rastreamento de movimento habilitados por um sistema composto de meta-olho
Enxergando o Movimento em Três Dimensões
Imagine uma câmera minúscula que permite a um drone não apenas ver onde vários outros objetos voadores estão, mas também traçar seus trajetos no espaço com detalhes na escala de milímetros. Este estudo apresenta justamente esse dispositivo, inspirado nos olhos de insetos e construído com ótica plana de ponta. Ele foi projetado para ajudar robôs, drones e outras máquinas a navegar em ambientes ocupados e cheios de obstáculos de forma segura e suave.
Por Que Encontrar a Posição é Difícil
Encontrar a posição exata de objetos em movimento em três dimensões pode soar simples, mas na prática é surpreendentemente complicado. Sistemas por rádio, como o GPS, funcionam bem ao ar livre, mas perdem precisão em cidades e ambientes internos, onde sinais refletem em paredes ou são bloqueados totalmente. Câmeras ópticas podem capturar detalhes finos, porém câmeras comuns de lente única achatam o mundo em duas dimensões, dificultando saber quão distantes as coisas realmente estão. A visão estéreo clássica usa duas câmeras espaçadas para recuperar profundidade a partir da paralaxe, como fazem os olhos humanos, mas alcançar alta precisão geralmente requer uma separação física grande entre as câmeras. Isso torna esses sistemas volumosos e pouco práticos para robôs voadores compactos.
Aprendendo com os Olhos dos Insetos
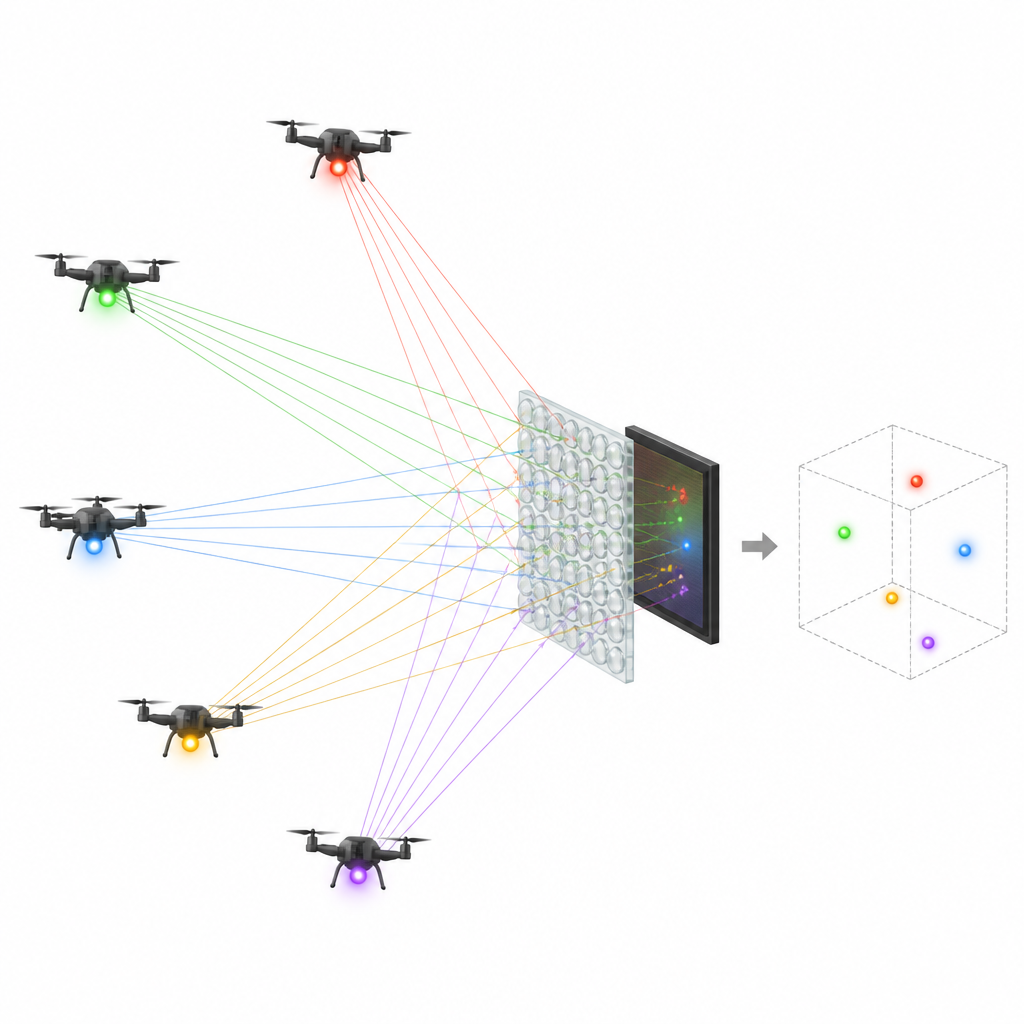
Os insetos resolvem um problema relacionado com seus olhos compostos, que consistem em muitas unidades pequenas, cada uma olhando em uma direção ligeiramente diferente. Os pesquisadores imitaram essa ideia com o que chamam de sistema composto de meta-olho. Em vez de unidades biológicas curvas, eles arranjaram uma grade de pequenas lentes planas, conhecidas como metalentes, acima de um sensor plano de luz. Cada mini lente atua como um sub-olho: a luz de um alvo emissor, como um farol infravermelho em um drone, é focalizada em um ponto nítido no sensor. Como os sub-olhos estão separados no espaço e veem o alvo de ângulos ligeiramente distintos, o padrão de pontos contém informação sobre onde o alvo está localizado em três dimensões.
Transformando Pequenos Deslocamentos em Mapas 3D
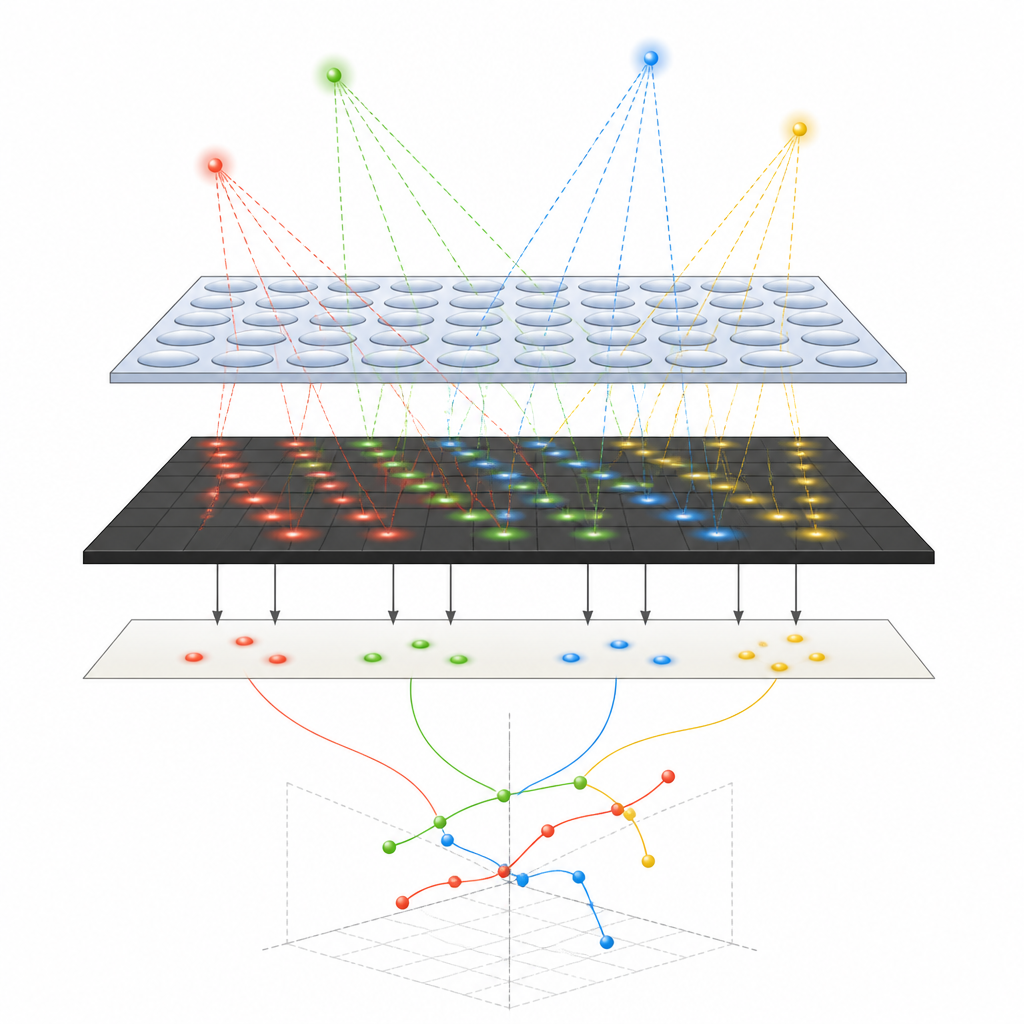
O núcleo do sistema é um método matemático que converte os espaçamentos entre todos esses pontos em uma estimativa de posição precisa. Em vez de depender de apenas alguns pares de sub-olhos, a equipe usa um algoritmo de razão global que combina informação de paralaxe de cada par de sub-olhos na matriz. Essa abordagem de média reduz o ruído aleatório e melhora a precisão da profundidade. Em testes, os pesquisadores construíram um protótipo com uma grade de três por três metalentes, cada uma com apenas 1,6 milímetro de diâmetro, colocadas acima de um sensor infravermelho de alta resolução. Eles mostraram que um único alvo emissor de luz podia ser localizado a até um metro do dispositivo com erro de profundidade inferior a dois por cento, mesmo quando o alvo foi movido entre várias distâncias conhecidas.
Seguindo Muitos Alvos em Movimento ao Mesmo Tempo
Para demonstrar que o sistema lida com movimento real, a equipe criou um simulador multi-alvo usando um display programável. Pontos brilhantes na tela representaram vários drones movendo-se ao longo de trajetórias retas, curvas e em forma de letras. O meta-olho composto registrou uma matriz de pontos para cada ponto brilhante, e o algoritmo agrupou e rastreou essas matrizes ao longo do tempo. Após uma etapa de calibração única para corrigir pequenos desalinhamentos mecânicos, o sistema pôde reconstruir as trajetórias tridimensionais de até quatro alvos simultaneamente. Em muitos testes, incluindo linhas retas, círculos e formas mais complexas, as trajetórias reconstruídas diferiram das reais em menos de dois por cento, com desvios típicos menores que meio milímetro.
Sensor Pequeno, Grandes Possibilidades
Como tudo é empacotado em uma pilha fina de lentes planas e um detector, o meta-olho composto permanece compacto ao mesmo tempo que oferece alta precisão. Os pesquisadores argumentam que o projeto pode ser escalado para cobrir ângulos de visão maiores, lidar com mais alvos e até adicionar reconhecimento da forma do alvo, não apenas da posição. Com desenvolvimento adicional e calibração automatizada, tais sensores poderiam ajudar enxames de drones a voarem em formação, permitir que robôs se desloquem com segurança por salas lotadas e dar a agentes inteligentes incorporados uma percepção rápida e confiável de onde muitos objetos estão em seu entorno.
Citação: Zhang, L., Zhang, L., Zhao, X. et al. Multi-target positioning and motion tracking enabled by a compound meta-eye system. Microsyst Nanoeng 12, 203 (2026). https://doi.org/10.1038/s41378-026-01319-9
Palavras-chave: posicionamento 3D, rastreamento de movimento, metalente, olho composto, navegação de drones