Clear Sky Science · en
Multi-target positioning and motion tracking enabled by a compound meta-eye system
Seeing Motion in Three Dimensions
Imagine a tiny camera that lets a drone not only see where several other flying objects are, but also trace their paths in space with millimeter-scale detail. This study introduces just such a device, inspired by insect eyes and built with cutting-edge flat optics. It is designed to help robots, drones, and other machines navigate busy, cluttered environments safely and smoothly.
Why Finding Position Is Hard
Finding the exact position of moving objects in three dimensions may sound simple, but it is surprisingly difficult in practice. Radio systems such as GPS work well outdoors but lose accuracy in cities and indoors, where signals bounce off walls or are blocked entirely. Optical cameras can capture fine detail, yet standard single-lens cameras flatten the world into two dimensions, making it hard to tell how far away things really are. Classic stereo vision uses two cameras spaced apart to recover depth from parallax, like human eyes do, but gaining high accuracy usually requires a large physical separation between the cameras. That makes such systems bulky and awkward for compact flying robots.
Learning from Insect Eyes
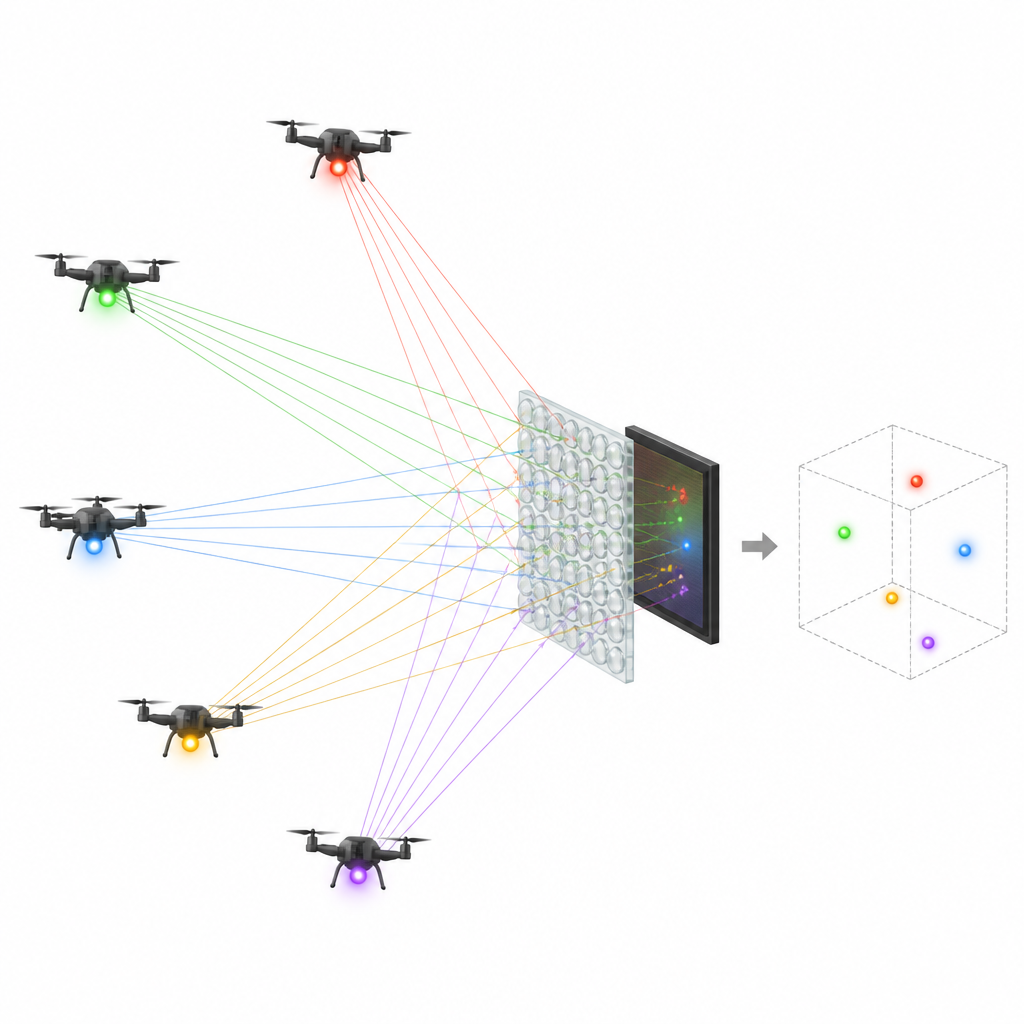
Insects solve a related problem with their compound eyes, which consist of many small units, each looking in a slightly different direction. The researchers mimicked this idea with what they call a compound meta-eye system. Instead of curved biological units, they arranged a grid of tiny flat lenses, known as metalenses, above a flat light sensor. Each mini lens acts as a sub-eye: light from a glowing target, such as an infrared beacon on a drone, is focused into a sharp spot on the sensor. Because the sub-eyes are separated in space and see the target from slightly different angles, the pattern of spots contains information about where the target is located in three dimensions.
Turning Tiny Shifts into 3D Maps
The core of the system is a mathematical method that converts the spacing between all these spots into a precise position estimate. Rather than relying on just a few pairs of sub-eyes, the team uses a global-ratio algorithm that combines parallax information from every pair of sub-eyes in the array. This averaging approach reduces random noise and improves depth accuracy. In tests, the researchers built a prototype with a three-by-three grid of metalenses, each only 1.6 millimeters across, placed above a high-resolution infrared sensor. They showed that a single light-emitting target could be located within a meter of the device with a depth error of less than two percent, even as the target was moved between several known distances.
Following Many Moving Targets at Once
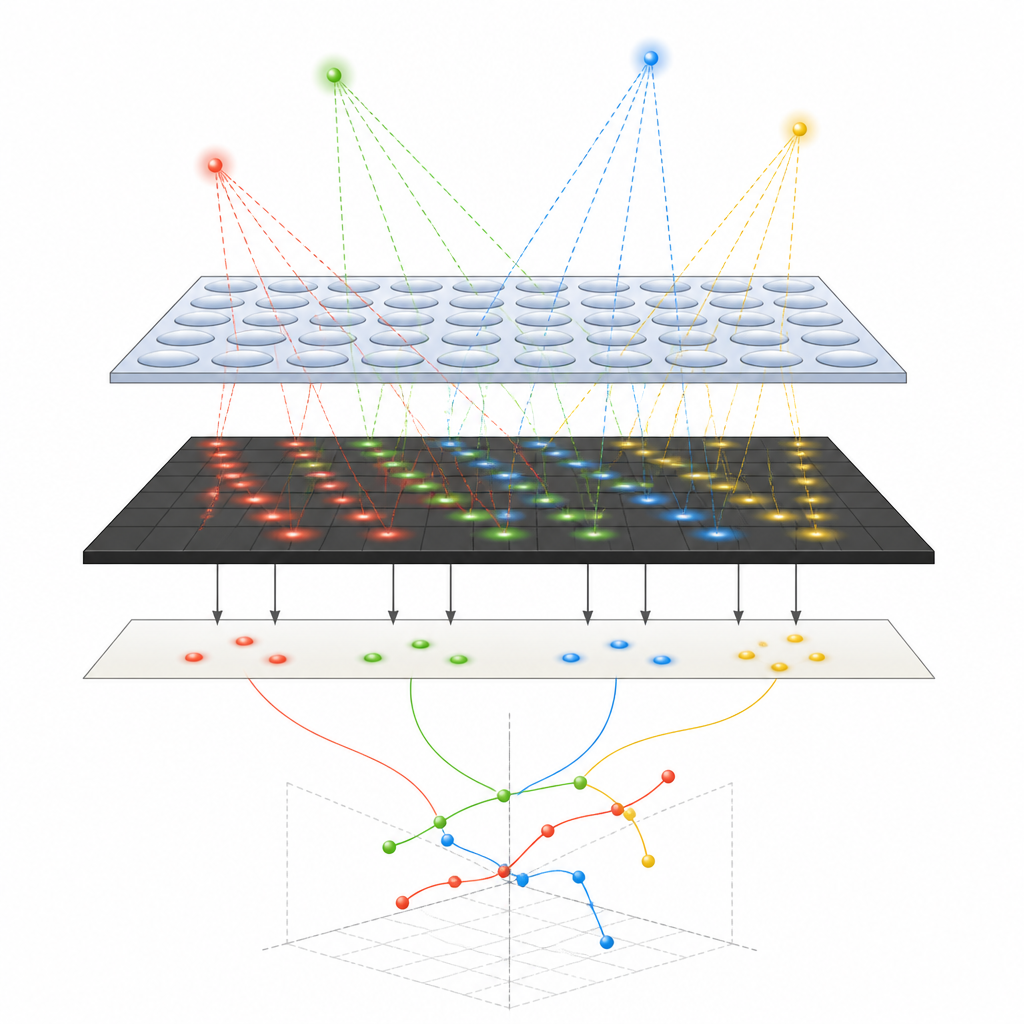
To show that their system can handle real motion, the team created a multi-target simulator using a programmable display. Bright spots on the screen stood in for several drones moving along straight, curved, and letter-shaped paths. The compound meta-eye recorded an array of spots for each bright point, and the algorithm grouped and tracked these arrays over time. After a one-time calibration step to correct for slight mechanical misalignments, the system could reconstruct the three-dimensional paths of up to four targets at once. Across many tests, including straight lines, circles, and more complex shapes, the reconstructed trajectories differed from the true ones by less than two percent, with typical deviations smaller than half a millimeter.
Small Sensor, Big Possibilities
Because everything is packed into a thin stack of flat lenses and a detector, the compound meta-eye remains compact while still offering high precision. The researchers argue that the design can be scaled to cover wider viewing angles, handle more targets, and even add recognition of target shape, not just position. With further development and automated calibration, such sensors could help swarms of drones fly in formation, allow robots to weave safely through crowded rooms, and give embodied intelligent agents a fast, reliable sense of where many objects are in their surroundings.
Citation: Zhang, L., Zhang, L., Zhao, X. et al. Multi-target positioning and motion tracking enabled by a compound meta-eye system. Microsyst Nanoeng 12, 203 (2026). https://doi.org/10.1038/s41378-026-01319-9
Keywords: 3D positioning, motion tracking, metalens, compound eye, drone navigation