Clear Sky Science · pl
Wielopunktowe pozycjonowanie i śledzenie ruchu umożliwione przez złożony system meta-oka
Postrzeganie ruchu w trzech wymiarach
Wyobraź sobie maleńką kamerę, która pozwala dronowi nie tylko zobaczyć, gdzie znajdują się inne latające obiekty, lecz także odtworzyć ich ścieżki w przestrzeni z dokładnością rzędu milimetrów. W badaniu przedstawiono właśnie takie urządzenie, zainspirowane oczami owadów i zrealizowane przy użyciu nowoczesnej, płaskiej optyki. Zostało zaprojektowane, by pomagać robotom, dronom i innym maszynom bezpiecznie i płynnie poruszać się w zatłoczonych, skomplikowanych środowiskach.
Dlaczego znalezienie pozycji jest trudne
Ustalenie dokładnej pozycji poruszających się obiektów w trzech wymiarach może wydawać się proste, ale w praktyce jest zaskakująco trudne. Systemy radiowe, takie jak GPS, dobrze działają na otwartej przestrzeni, ale tracą dokładność w miastach i wewnątrz budynków, gdzie sygnały odbijają się od ścian lub są całkowicie blokowane. Kamery optyczne rejestrują wiele szczegółów, jednak standardowe obiektywy jednosoczewkowe spłaszczają świat do dwóch wymiarów, utrudniając określenie rzeczywistej odległości. Klasyczna wizja stereoskopowa używa dwóch kamer rozstawionych na pewnej odległości, by odzyskać głębię z paralaksy, podobnie jak robią to ludzkie oczy, ale uzyskanie wysokiej dokładności zwykle wymaga znacznego rozstawu kamer. To sprawia, że takie systemy są nieporęczne dla kompaktowych latających robotów.
Uczenie się od oczu owadów
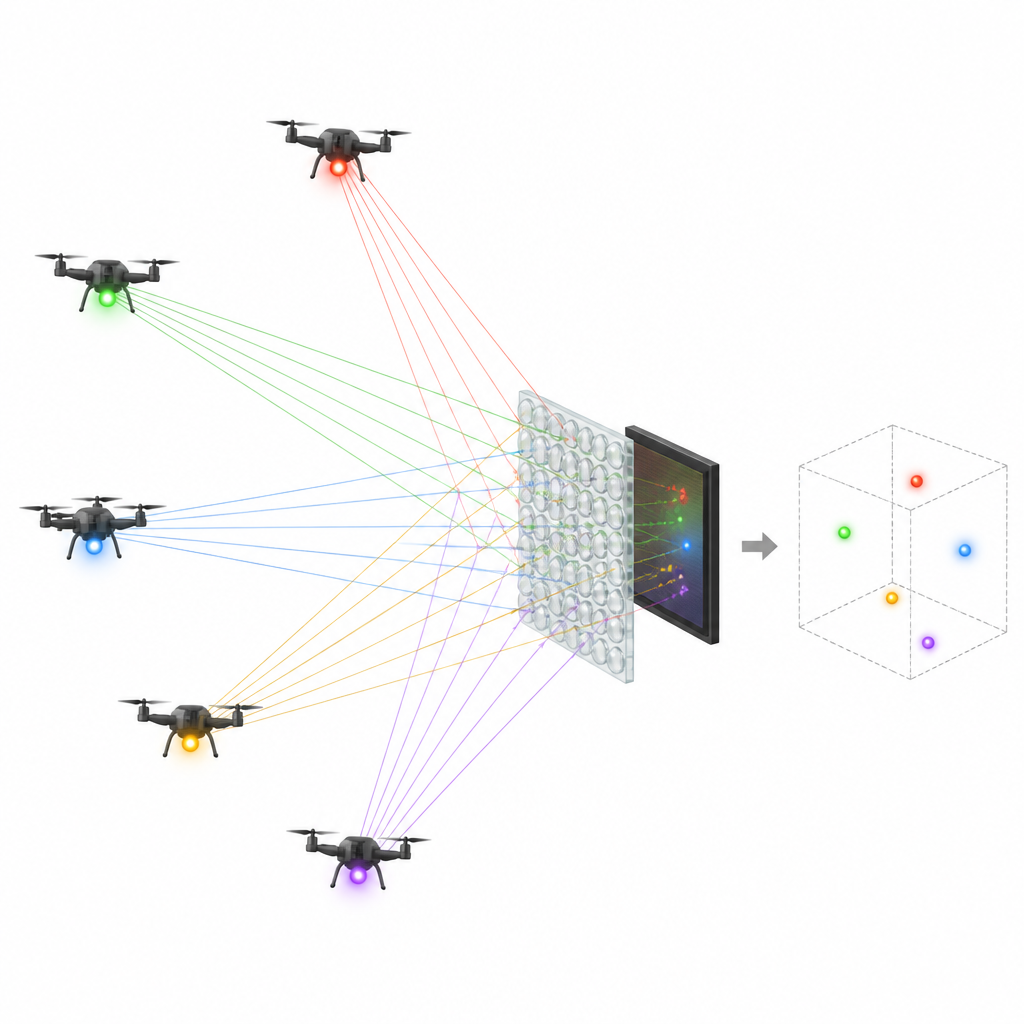
Owady rozwiązują podobny problem dzięki swoim oczom złożonym, które składają się z wielu małych jednostek, każda patrząca w nieco innym kierunku. Badacze naśladowali tę ideę, tworząc system nazywany złożonym meta-okiem. Zamiast zakrzywionych, biologicznych jednostek, ułożyli siatkę maleńkich płaskich soczewek, znanych jako metalensy, nad płaskim detektorem światła. Każda minisoczewka działa jak sub-oko: światło z świecącego celu, na przykład podczerwonej latarni na dronie, jest ogniskowane w ostrą plamę na detektorze. Ponieważ sub-oka są rozdzielone w przestrzeni i obserwują cel pod nieco różnymi kątami, wzór plam zawiera informację o tym, gdzie cel znajduje się w trzech wymiarach.
Przekształcanie drobnych przesunięć w mapy 3D
Rdzeniem systemu jest metoda matematyczna, która zamienia odległości między tymi plamami w precyzyjne oszacowanie pozycji. Zamiast polegać tylko na kilku parach sub-oczu, zespół zastosował algorytm global-ratio, który łączy informacje o paralaksie ze wszystkich par sub-oczu w polu. Takie uśrednianie redukuje losowy szum i poprawia dokładność określania głębokości. W testach naukowcy zbudowali prototyp z siatką metalensów 3 na 3, z których każdy ma tylko 1,6 milimetra średnicy, umieszczony nad wysokorozdzielczym sensorem podczerwieni. Wykazali, że pojedynczy świecący punkt można zlokalizować w zasięgu metra od urządzenia z błędem głębokości mniejszym niż dwa procent, nawet gdy cel był przesuwany między kilkoma znanymi odległościami.
Śledzenie wielu poruszających się celów jednocześnie
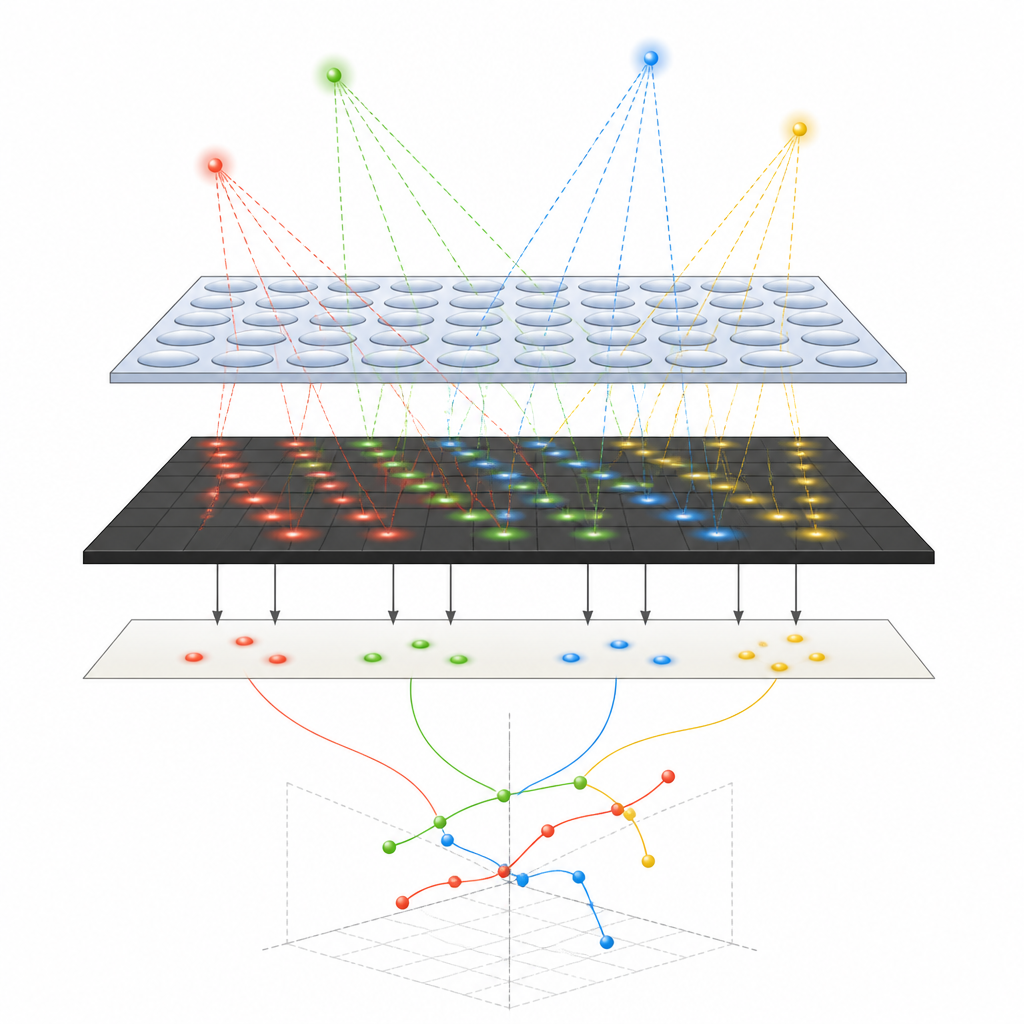
Aby pokazać, że system radzi sobie z rzeczywistym ruchem, zespół stworzył symulator wielu celów używając programowalnego wyświetlacza. Jasne plamy na ekranie zastępowały kilka dronów poruszających się po prostych, zakrzywionych oraz kształtem liter trasach. Złożone meta-oko rejestrowało dla każdego punktu jasności macierz plam, a algorytm grupował i śledził te macierze w czasie. Po jednorazowej kalibracji korygującej drobne mechaniczne niedokładności system potrafił odtworzyć trójwymiarowe trajektorie do czterech celów jednocześnie. W licznych testach, obejmujących linie proste, okręgi i bardziej złożone kształty, odtworzone trajektorie różniły się od rzeczywistych o mniej niż dwa procent, przy typowych odchyleniach mniejszych niż pół milimetra.
Mały sensor, wielkie możliwości
Dzięki temu, że wszystko umieszczono w cienkim stosie płaskich soczewek i detektora, złożone meta-oko pozostaje kompaktowe, a jednocześnie oferuje wysoką precyzję. Badacze twierdzą, że konstrukcję można skalować, by objąć szersze kąty widzenia, obsłużyć więcej celów, a nawet dodać rozpoznawanie kształtu celu, nie tylko jego położenia. Przy dalszym rozwoju i zautomatyzowanej kalibracji takie sensory mogłyby pomóc rojom dronów latać w formacjach, umożliwić robotom bezpieczne przemykanie przez zatłoczone pomieszczenia i dać fizycznym agentom szybkie, niezawodne poczucie położenia wielu obiektów w otoczeniu.
Cytowanie: Zhang, L., Zhang, L., Zhao, X. et al. Multi-target positioning and motion tracking enabled by a compound meta-eye system. Microsyst Nanoeng 12, 203 (2026). https://doi.org/10.1038/s41378-026-01319-9
Słowa kluczowe: pozycjonowanie 3D, śledzenie ruchu, metalens, złożone oko, nawigacja dronów