Clear Sky Science · nl
Multi-doel positionering en bewegingsvolging mogelijk gemaakt door een samengesteld meta-oogsysteem
Beweging in drie dimensies waarnemen
Stel je een piepkleine camera voor die een drone niet alleen laat zien waar meerdere andere vliegende objecten zich bevinden, maar ook hun banen in de ruimte volgt met millimeternauwkeurigheid. Deze studie introduceert precies zo’n apparaat, geïnspireerd op insectenoogjes en gebouwd met moderne platte optica. Het is ontworpen om robots, drones en andere machines te helpen veilig en soepel door drukke, rommelige omgevingen te navigeren.
Waarom positie bepalen moeilijk is
De exacte positie van bewegende objecten in drie dimensies vinden klinkt misschien eenvoudig, maar in de praktijk is het verrassend lastig. Radiosystemen zoals gps werken goed buitenshuis, maar verliezen nauwkeurigheid in steden en binnenshuis, waar signalen van muren reflecteren of geheel geblokkeerd worden. Optische camera’s kunnen fijne details vastleggen, maar conventionele enkelvoudige lenzen drukken de wereld plat tot twee dimensies, wat het moeilijk maakt om te bepalen hoe ver iets echt weg is. Klassieke stereozicht gebruikt twee camera’s die uit elkaar staan om diepte uit parallaxe te herleiden, zoals menselijke ogen doen, maar hoge nauwkeurigheid vereist vaak een grote fysieke afstand tussen de camera’s. Dat maakt zulke systemen log en onhandig voor compacte vliegende robots.
Leren van insectenogen
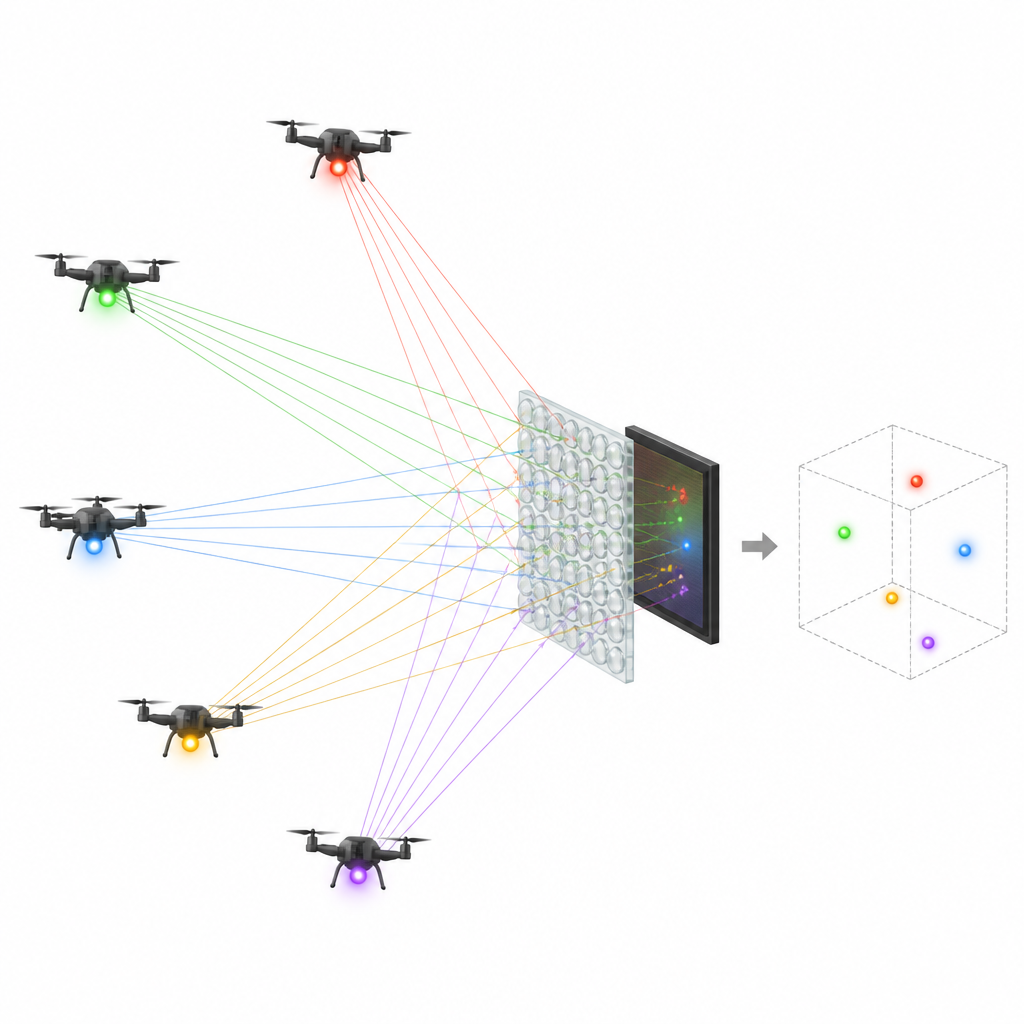
Insecten lossen een verwant probleem op met hun samengestelde ogen, die uit veel kleine eenheden bestaan, elk gericht in een iets andere richting. De onderzoekers imiteerden dit idee met wat zij een samengesteld meta-oogsysteem noemen. In plaats van gekromde biologische eenheden rangschikten ze een raster van piepkleine platte lenzen, zogenaamde metalenzen, boven een vlakke lichtsensor. Iedere mini-lens werkt als een sub-oog: licht van een gloeiend doel, zoals een infraroodbaken op een drone, wordt tot een scherpe vlek op de sensor gefocusseerd. Omdat de sub-ogen ruimtelijk gescheiden zijn en het doel vanuit iets andere hoeken bekijken, bevat het patroon van vlekken informatie over waar het doel zich in drie dimensies bevindt.
Kleine verschuivingen omzetten in 3D-kaarten
De kern van het systeem is een wiskundige methode die de afstand tussen al die vlekken omzet in een nauwkeurige positiebepaling. In plaats van te steunen op slechts een paar paren sub-ogen gebruikt het team een global-ratio-algoritme dat parallaxe-informatie van elk paar sub-ogen in de array combineert. Deze gemiddelde aanpak verkleint willekeurige ruis en verbetert de dieptenauwkeurigheid. In tests bouwden de onderzoekers een prototype met een drie-by-drie raster van metalenzen, elk slechts 1,6 millimeter in doorsnee, geplaatst boven een hoge-resolutie infraroodsensor. Ze toonden aan dat een enkel lichtgevend doel binnen een meter van het apparaat gelokaliseerd kon worden met een dieptefout van minder dan twee procent, zelfs wanneer het doel tussen meerdere bekende afstanden werd verplaatst.
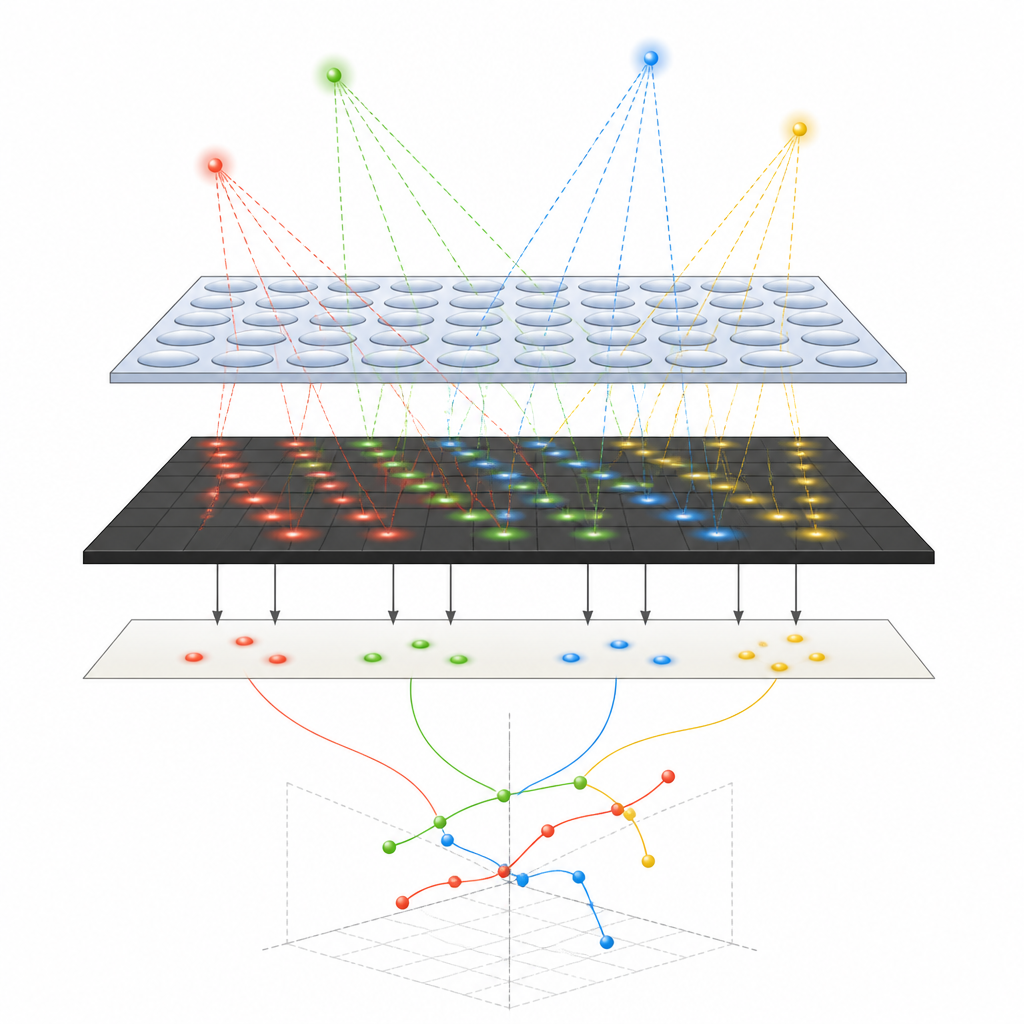
Meerdere bewegende doelen tegelijk volgen
Om te laten zien dat hun systeem echte beweging aankan, creëerde het team een multi-doel simulator met een programmeerbaar scherm. Heldere vlekken op het scherm stonden voor meerdere drones die langs rechte, kromme en lettervormige banen bewogen. Het samengestelde meta-oog registreerde een array van vlekken voor elk helder punt, en het algoritme groepeerde en volgde deze arrays in de tijd. Na een eenmalige kalibratiestap om lichte mechanische uitlijningen te corrigeren, kon het systeem de driedimensionale banen van maximaal vier doelen tegelijk reconstrueren. Over veel tests, waaronder rechte lijnen, cirkels en complexere vormen, week de gereconstrueerde trajecten minder dan twee procent af van de werkelijke banen, met typische afwijkingen kleiner dan een halve millimeter.
Kleine sensor, grote mogelijkheden
Aangezien alles is samengebracht in een dunne stapel platte lenzen en een detector, blijft het samengestelde meta-oog compact terwijl het toch hoge precisie biedt. De onderzoekers stellen dat het ontwerp opgeschaald kan worden om bredere kijkhoeken te dekken, meer doelen te verwerken en zelfs herkenning van doelvormen toe te voegen, niet alleen positie. Met verdere ontwikkeling en geautomatiseerde kalibratie zouden dergelijke sensoren zwermen van drones kunnen helpen in formatie te vliegen, robots in staat stellen veilig door drukke ruimtes te manoeuvreren, en belichaamde intelligente agenten een snelle, betrouwbare waarneming geven van waar veel objecten zich in hun omgeving bevinden.
Bronvermelding: Zhang, L., Zhang, L., Zhao, X. et al. Multi-target positioning and motion tracking enabled by a compound meta-eye system. Microsyst Nanoeng 12, 203 (2026). https://doi.org/10.1038/s41378-026-01319-9
Trefwoorden: 3D-positionering, bewegingsvolging, metalens, samengesteld oog, drone-navigatie