Clear Sky Science · es
Posicionamiento múltiple y seguimiento de movimiento habilitados por un sistema compuesto de meta-ojo
Ver el movimiento en tres dimensiones
Imagínese una cámara diminuta que permite a un dron no solo ver dónde están varios otros objetos voladores, sino también trazar sus trayectorias en el espacio con un detalle de escala milimétrica. Este estudio presenta precisamente ese dispositivo, inspirado en los ojos de los insectos y construido con óptica plana de última generación. Está diseñado para ayudar a robots, drones y otras máquinas a navegar en entornos concurridos y complejos de manera segura y fluida.
Por qué es difícil encontrar la posición
Encontrar la posición exacta de objetos en movimiento en tres dimensiones puede parecer sencillo, pero en la práctica resulta sorprendentemente difícil. Sistemas de radio como el GPS funcionan bien en exteriores, pero pierden precisión en ciudades y en interiores, donde las señales rebotan en las paredes o se bloquean por completo. Las cámaras ópticas capturan detalles finos, pero las cámaras convencionales de lente única aplastan el mundo a dos dimensiones, lo que dificulta saber a qué distancia están las cosas. La visión estereoscópica clásica utiliza dos cámaras separadas para recuperar la profundidad a partir del paralaje, como hacen los ojos humanos, pero obtener alta precisión suele exigir una separación física grande entre las cámaras. Eso hace que esos sistemas sean voluminosos e incómodos para robots voladores compactos.
Aprendiendo de los ojos de los insectos
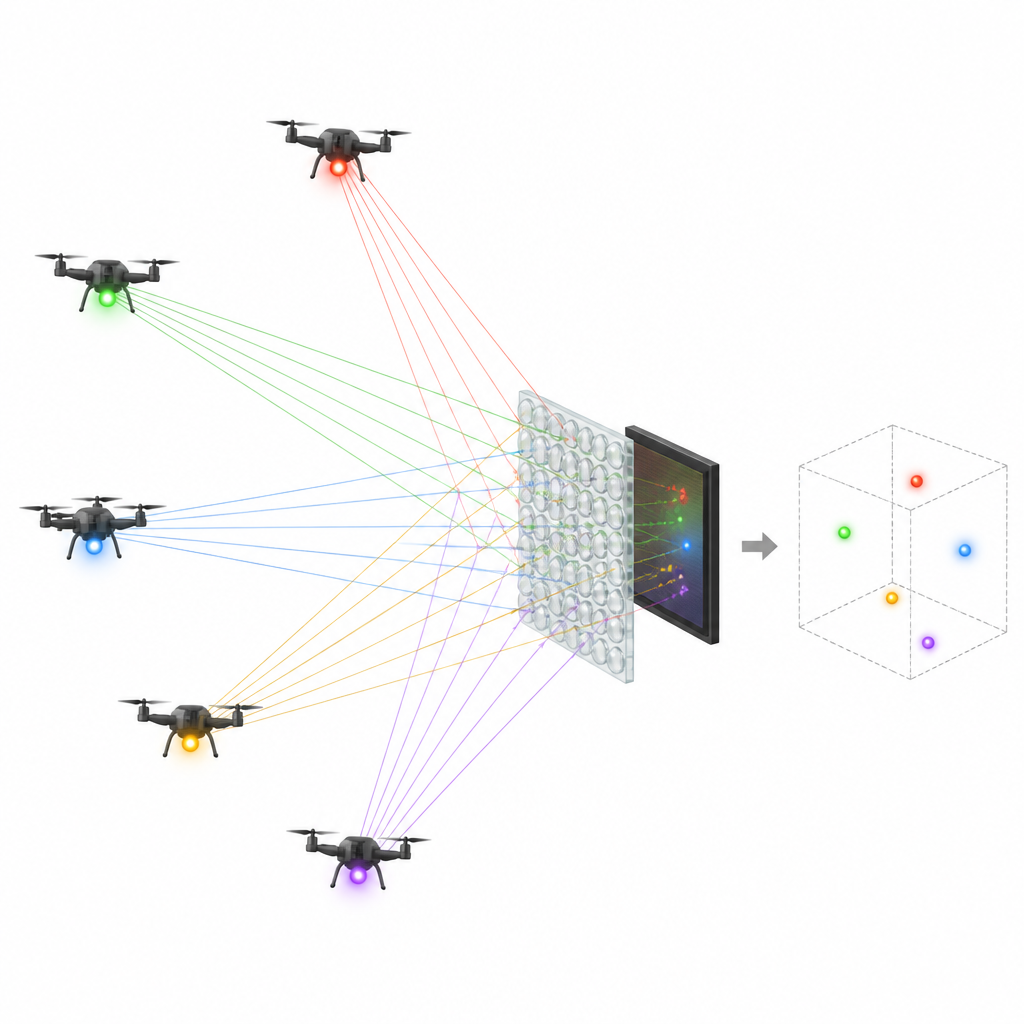
Los insectos resuelven un problema relacionado con sus ojos compuestos, que consisten en muchas unidades pequeñas, cada una mirando en una dirección ligeramente distinta. Los investigadores imitaron esta idea con lo que denominan un sistema compuesto de meta-ojo. En lugar de unidades biológicas curvadas, dispusieron una cuadrícula de diminutas lentes planas, conocidas como metalentes, sobre un sensor de luz plano. Cada mini lente actúa como un subojo: la luz de un objetivo luminoso, como una baliza infrarroja en un dron, se concentra en un punto nítido sobre el sensor. Debido a que los subojos están separados en el espacio y ven el objetivo desde ángulos ligeramente distintos, el patrón de puntos contiene información sobre la ubicación del objetivo en tres dimensiones.
Convertir desplazamientos diminutos en mapas 3D
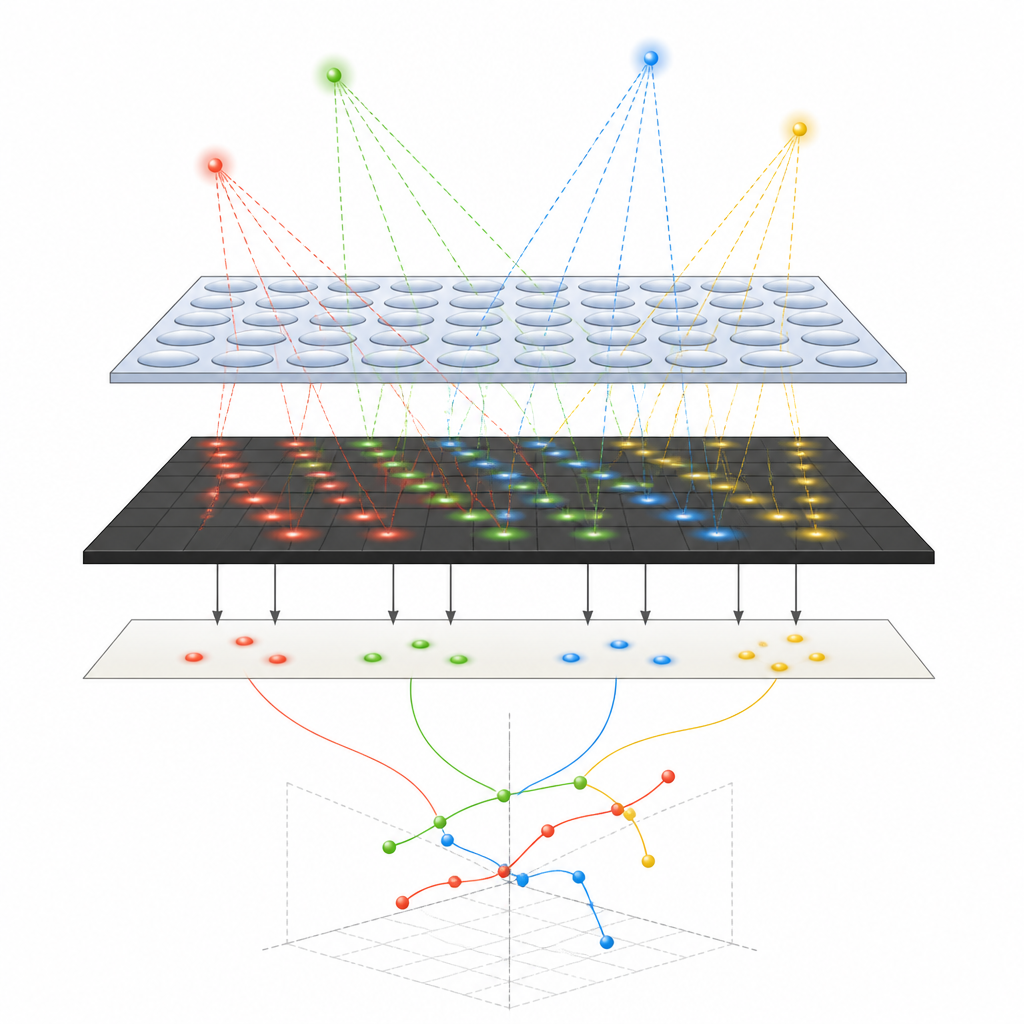
El núcleo del sistema es un método matemático que convierte el espaciado entre todos esos puntos en una estimación de posición precisa. En lugar de depender de solo unos pocos pares de subojos, el equipo usa un algoritmo de razón global que combina la información de paralaje de cada par de subojos en la matriz. Este enfoque de promediado reduce el ruido aleatorio y mejora la precisión en profundidad. En las pruebas, los investigadores construyeron un prototipo con una cuadrícula de metalentes de tres por tres, cada una de solo 1,6 milímetros de diámetro, colocadas sobre un sensor infrarrojo de alta resolución. Mostraron que un único objetivo emisor de luz podía localizarse dentro de un metro del dispositivo con un error en profundidad inferior al dos por ciento, incluso cuando el objetivo se movía entre varias distancias conocidas.
Seguir muchos objetivos en movimiento a la vez
Para demostrar que su sistema puede manejar movimiento real, el equipo creó un simulador de múltiples objetivos usando una pantalla programable. Puntos brillantes en la pantalla representaban varios drones que se movían a lo largo de trayectorias rectas, curvas y en forma de letras. El meta-ojo compuesto registró una matriz de puntos para cada punto brillante, y el algoritmo agrupó y siguió estas matrices a lo largo del tiempo. Tras un paso de calibración único para corregir ligeras desalineaciones mecánicas, el sistema pudo reconstruir las trayectorias tridimensionales de hasta cuatro objetivos a la vez. En numerosas pruebas, incluyendo líneas rectas, círculos y formas más complejas, las trayectorias reconstruidas difirieron de las reales en menos del dos por ciento, con desviaciones típicas inferiores a medio milímetro.
Sensor pequeño, grandes posibilidades
Debido a que todo está empaquetado en una delgada pila de lentes planas y un detector, el meta-ojo compuesto se mantiene compacto y, aun así, ofrece alta precisión. Los investigadores sostienen que el diseño puede escalarse para cubrir ángulos de visión más amplios, manejar más objetivos e incluso añadir reconocimiento de la forma del objetivo, no solo su posición. Con más desarrollo y calibración automatizada, tales sensores podrían ayudar a enjambres de drones a volar en formación, permitir que robots se desplacen con seguridad por habitaciones concurridas y proporcionar a agentes inteligentes incorporados un sentido rápido y fiable de dónde están muchos objetos en su entorno.
Cita: Zhang, L., Zhang, L., Zhao, X. et al. Multi-target positioning and motion tracking enabled by a compound meta-eye system. Microsyst Nanoeng 12, 203 (2026). https://doi.org/10.1038/s41378-026-01319-9
Palabras clave: posicionamiento 3D, seguimiento de movimiento, metalente, ojo compuesto, navegación de drones