Clear Sky Science · he
מיקום מרובה-מטרות ומעקב תנועה המופעלים על ידי מערכת עין-מתה מורכבת
לראות תנועה בשלוש ממדים
דמיינו מצלמה זעירה שמאפשרת לרחפן לא רק לזהות היכן נמצאים מספר גופים מעופפים אחרים, אלא גם לעקוב אחר מסלולם במרחב ברזולוציית מילימטרים. המחקר מציג בדיוק מכשיר כזה, בהשראת עיני חרקים ובנוי באמצעות אופטיקה שטוחה מתקדמת. המערכת מיועדת לסייע לרובוטים, רחפנים ומכונות אחרות לנווט בסביבות צפופות ומסוכסכות בבטחה ובחלקות.
מדוע מציאת מיקום קשה
מציאת המיקום המדויק של עצמים נעים בתלת־ממד עשויה להישמע פשוטה, אך בפועל היא מפתיעה כמאתגרת. מערכות רדיו כמו GPS עובדות טוב בחוץ אך מאבדות דיוק בערים ובמבנים פנימיים, שם אותות מתרסקות על קירות או נחסמות לגמרי. מצלמות אופטיות יכולות ללכוד פרטים עדינים, אך מצלמות רגילות עם עדשה אחת מפשטות את העולם לשתי ממדים, מה שמקשה לקבוע את מרחקם המדויק של עצמים. ראייה סטריאופונית קלאסית משתמשת בשתי מצלמות הממוקמות במרחק זו מזו כדי לשחזר עומק באמצעות פרלקסה, כמו בעינינו, אך כדי להשיג דיוק גבוה נדרש מרחק פיזי גדול בין המצלמות — דבר שהופך את המערכת למגושמת ולא נוחה לרחפנים קטנים.
ללמוד מעיני חרקים
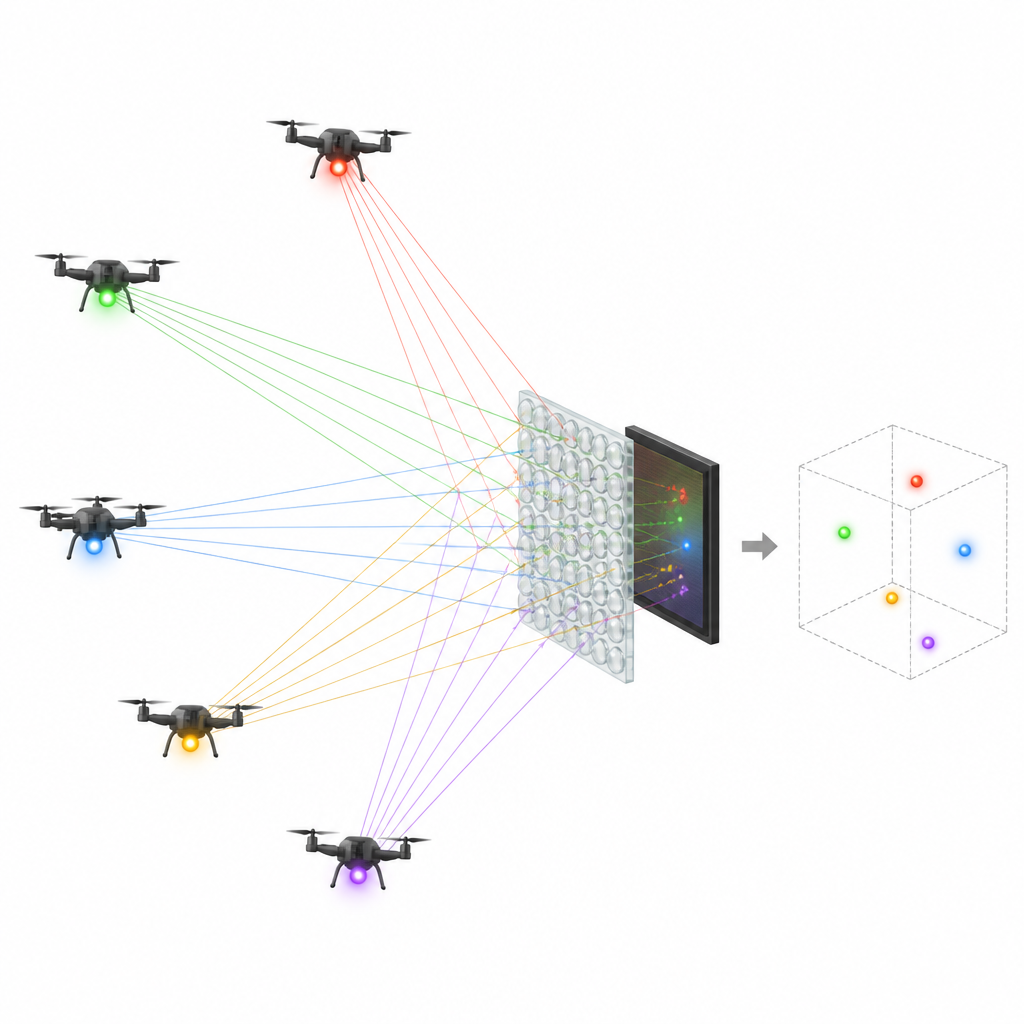
חרקים פותרים בעיה דומה באמצעות עיניהם המורכבות, המורכבות מרבים יחידות קטנות שכל אחת מהן מסתכלת בכיוון מעט שונה. החוקרים חיקו רעיון זה במה שהם מכנים מערכת עין-מתה מורכבת. במקום היחידות המעוקלות הביולוגיות, סידרו גריד של עדשות שטוחות זעירות, הנקראות מטאלנס, מעל חיישן אור שטוח. כל עדשה-מיקרו פועלת כתת-עין: אור ממטרה זוהרת, כמו משדר אינפרא־אדום על רחפן, מרוכז לנקודה חדה על החיישן. מאחר שתת-העיניים מופרדות במרחב ורואות את המטרה מזוויות מעט שונות, תבנית הנקודות מכילה מידע על מיקום המטרה בתלת־הממד.
הפיכת הזזות זעירות למפות תלת־ממדיות
הליבה של המערכת היא שיטה מתמטית הממירה את המרווחים בין כל הנקודות הללו לאמדן מיקום מדויק. במקום להסתמך על זוגות בודדים של תת-עיניים, הצוות משתמש באלגוריתם יחס גלובלי המשלב מידע פרלקסה מכל זוג בתצורת המערך. גישת הממוצע הזו מפחיתה רעש אקראי ומשפרת את דיוק העומק. בניסויים בנו החוקרים אב־טיפוס עם גריד של שלוש על שלוש מטאלנס, כל אחת בקוטר של 1.6 מילימטר בלבד, מונחות מעל חיישן אינפרא־אדום ברזולוציה גבוהה. הם הראו שמטרה פולטת אור בודדת יכולה להיות ממוקמת בטווח של עד מטר מהמכשיר עם שגיאת עומק של פחות משני אחוזים, גם כאשר המטרה זזה בין מרחקים ידועים שונים.
לעקוב אחרי מטרות רבות בו‑זמנית
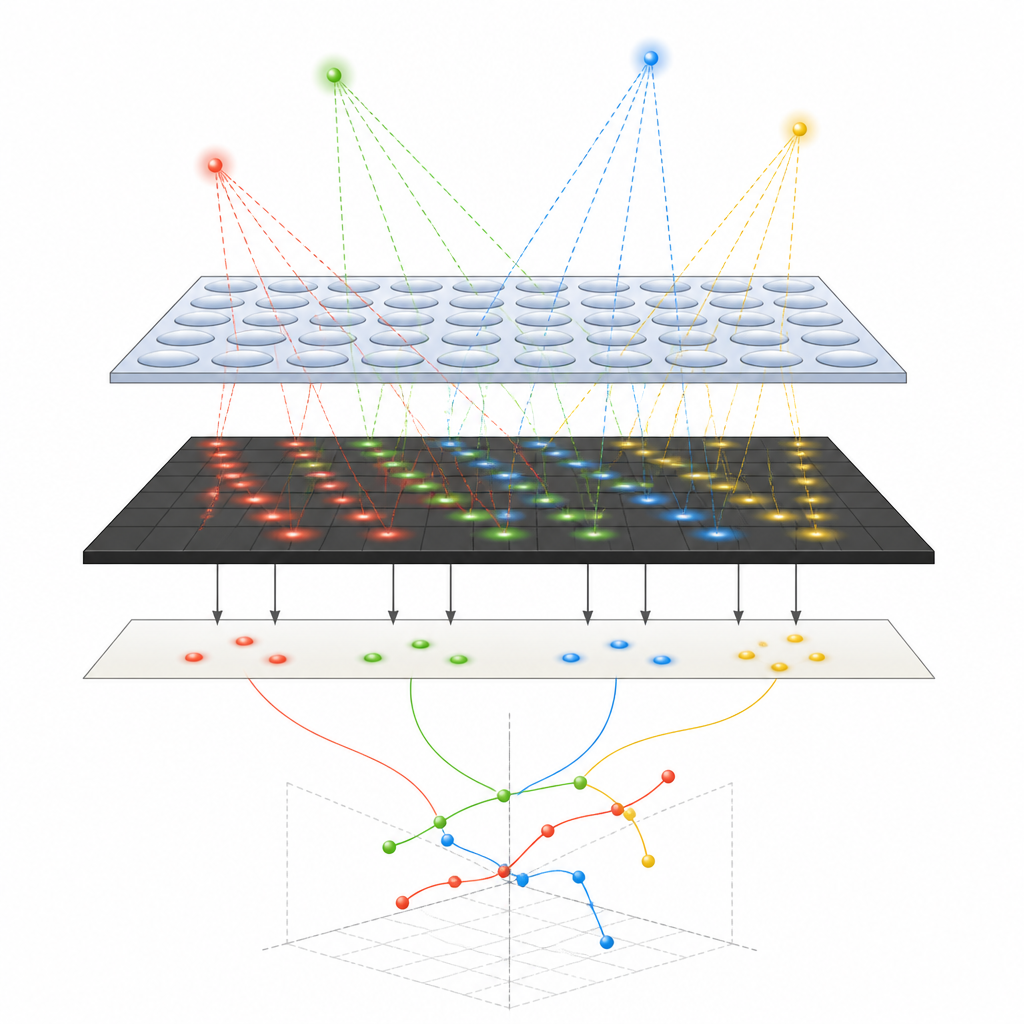
כדי להראות שהמערכת מסוגלת לטפל בתנועה אמיתית, הקבוצה יצרה סימולטור רב־מטרות באמצעות תצוגה הניתנת לתכנות. נקודות בהירות על המסך ייצגו כמה רחפנים שנעו לאורך מסלולים ישרים, מעוקלים וצורתיים. העין-מתה המרוכבת הקליטה מערך נקודות עבור כל נקודת אור, והאלגוריתם קיבץ ומעקב אחר מערכים אלה לאורך הזמן. לאחר שלב כיול חד‑פעמי לתיקון חוסר־יישור מכאני קל, המערכת יכלה לשחזר את המסלולים התלת־ממדיים של עד ארבע מטרות בו־זמנית. בניסויים רבים, כולל קווים ישרים, מעגלים וצורות מורכבות יותר, המסלולים המשוחזרים סטו מן האמת פחות משני אחוזים, עם סטיות טיפוסיות הקטנות מחצי מילימטר.
חיישן קטן, אפשרויות גדולות
מכיוון שהכל ארוז בערימה דקה של עדשות שטוחות וגלאי, העין-מתה המרוכבת נשארת קומפקטית ועדיין מציעה דיוק גבוה. החוקרים טוענים שהעיצוב ניתן להרחבה לכיסויי זווית רחבים יותר, לטיפול במספר מטרות גדול יותר ואפילו להוספת זיהוי צורת המטרה, לא רק המיקום. עם פיתוח נוסף וכיול אוטומטי, חיישנים כאלה יכולים לסייע לעדרי רחפנים לעוף בהרכבה, לאפשר לרובוטים לשרוך עצמם בבטחה בחדרים צפופים, ולספק לסוכנים מבוטאים ובעלי אינטליגנציה תחושה מהירה ואמינה של מיקום גופים רבים בסביבתם.
ציטוט: Zhang, L., Zhang, L., Zhao, X. et al. Multi-target positioning and motion tracking enabled by a compound meta-eye system. Microsyst Nanoeng 12, 203 (2026). https://doi.org/10.1038/s41378-026-01319-9
מילות מפתח: מיקום תלת־ממדי, מעקב תנועה, מטאלנס, עין מורכבת, ניווט רחפנים