Clear Sky Science · ja
化合メタアイシステムによる複数目標の位置特定と動体追跡
三次元で動きを見る
小さなカメラがドローンに、複数の飛行物体の位置を把握するだけでなく、ミリメートル単位の詳細でその軌跡を空間上に追跡させると想像してみてください。本研究はちょうどそんな装置を紹介します。昆虫の眼に着想を得て、最新の平面光学で作られたもので、ロボットやドローン、その他の機械が混雑した環境で安全かつ滑らかに移動できるよう設計されています。
位置特定が難しい理由
動く物体の三次元の正確な位置を見つけることは一見簡単に思えますが、実際には驚くほど難しい問題です。GPSのような無線システムは屋外ではよく機能しますが、信号が壁で反射したり遮られたりする都市部や屋内では精度が落ちます。光学カメラは詳細を捉えられますが、標準的な単一レンズのカメラは世界を二次元に平坦化してしまうため、物体までの距離を判別しにくくなります。古典的なステレオビジョンは、人間の目のように離れた2台のカメラで視差から深度を復元しますが、高い精度を得るにはカメラ間の物理的な間隔が大きくなる必要があり、これがコンパクトな飛行ロボットには嵩張る欠点となります。
昆虫の眼から学ぶ
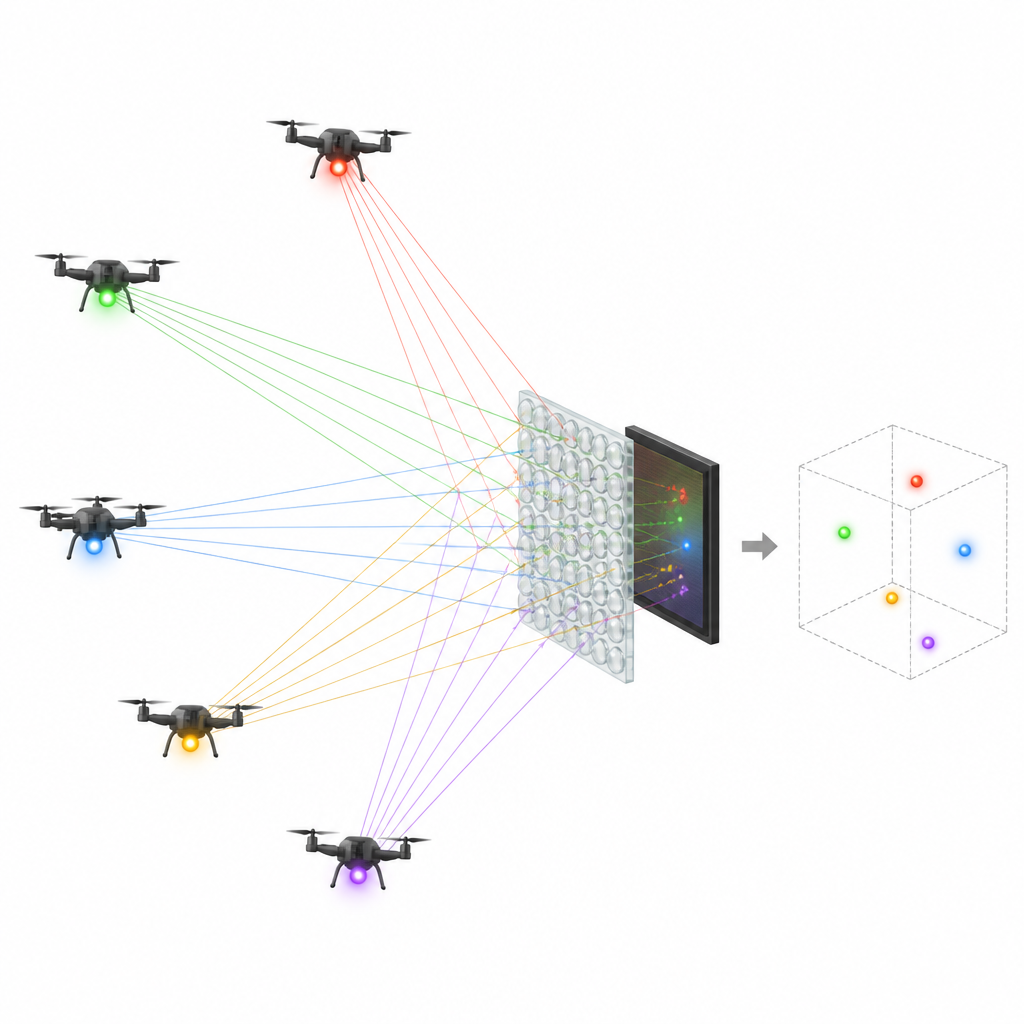
昆虫は、多数の小さな単位がわずかに異なる方向を向く複眼で、関連する問題を解決します。研究者たちはこの考えを模倣し、複合メタアイシステムと呼ぶものを作りました。曲面の生物学的単位の代わりに、平坦な小型レンズ(メタレンズ)を格子状に配置し、平面の光センサーの上に載せています。各ミニレンズはサブアイとして機能し、赤外ビーコンのような発光目標からの光をセンサー上に鋭いスポットとして集めます。サブアイが空間的に分離され、わずかに異なる角度から目標を観測するため、スポットのパターンには目標が三次元空間のどこにあるかという情報が含まれています。
小さなずれを3Dマップに変換する
システムの中核は、これらすべてのスポット間の配列を正確な位置推定に変換する数学的手法です。ごく少数のサブアイ対に頼るのではなく、チームは配列内のすべてのサブアイ対からの視差情報を組み合わせるグローバル比率アルゴリズムを用いています。この平均化アプローチはランダムノイズを低減し、深度精度を向上させます。試験では、各辺がわずか1.6ミリの三×三のメタレンズ格子を高解像度赤外センサーの上に配置したプロトタイプを構築しました。単一の発光目標が既知のいくつかの距離間を移動しても、装置から1メートル以内で深さ誤差が2パーセント未満にとどまることを示しました。
複数の動く目標を同時に追う
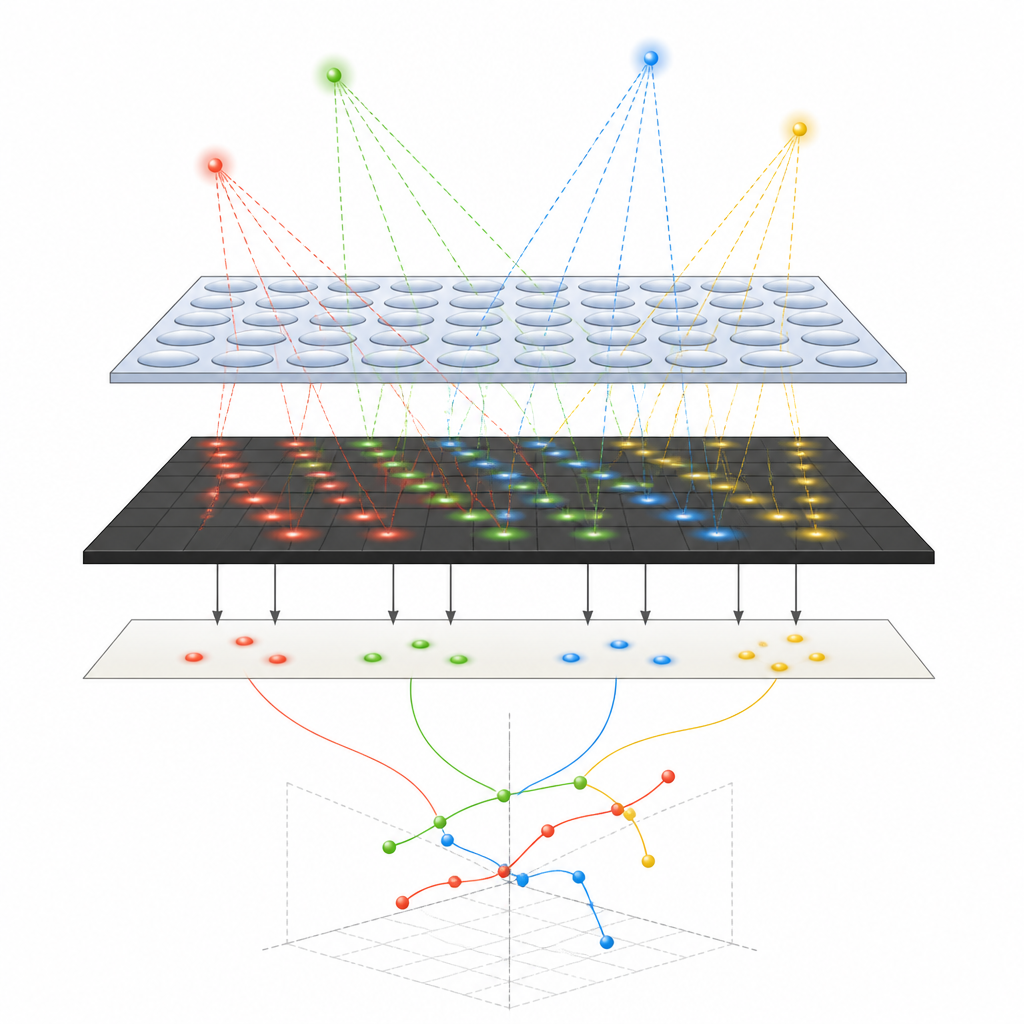
実際の動きに対応できることを示すために、チームはプログラム可能なディスプレイを使ったマルチターゲットシミュレータを作りました。画面上の明るいスポットが、直線、曲線、文字形の経路に沿って動く複数のドローンの代わりを務めました。複合メタアイは各明点についてスポットの配列を記録し、アルゴリズムはこれらの配列を時系列でグループ化して追跡しました。わずかな機械的ずれを補正するための一度きりの校正を行った後、システムは最大4つの目標の三次元軌跡を同時に再構成できました。直線、円、より複雑な形状を含む多数の試験において、再構成された軌跡は真の軌跡と比べて2パーセント未満の差であり、典型的な偏差は0.5ミリ未満でした。
小さなセンサー、大きな可能性
すべてが薄い平面レンズの積層と検出器に詰め込まれているため、複合メタアイはコンパクトさを保ちながら高精度を提供します。研究者たちは、この設計は視野角を広げたり、扱える目標数を増やしたり、位置だけでなく目標形状の認識を追加したりするようにスケールできると主張しています。さらなる開発と自動化された較正が進めば、この種のセンサーはドローン群の編隊飛行を助け、ロボットが混雑した部屋を安全に移動するのを可能にし、具現化された知的エージェントに多数の物体の位置を迅速かつ信頼性高く把握させることができるでしょう。
引用: Zhang, L., Zhang, L., Zhao, X. et al. Multi-target positioning and motion tracking enabled by a compound meta-eye system. Microsyst Nanoeng 12, 203 (2026). https://doi.org/10.1038/s41378-026-01319-9
キーワード: 3D位置特定, 動体追跡, メタレンズ, 複眼, ドローン航法