Clear Sky Science · tr
Bileşik meta-göz sistemiyle çok hedefli konumlandırma ve hareket takibi
Hareketi Üç Boyutta Görmek
Hayal edin: bir drone’un yalnızca birkaç uçan nesnenin nerede olduğunu görmesini sağlamakla kalmayıp, aynı zamanda bunların uzaydaki izlerini milimetre ölçeğinde ayrıntıyla takip etmesine olanak veren minik bir kamera. Bu çalışma, böcek gözlerinden ilham alan ve son teknoloji düz optikle inşa edilmiş tam da böyle bir cihazı tanıtıyor. Robotların, dronların ve diğer makinelerin yoğun, dağınık ortamlarda güvenli ve akıcı bir şekilde gezinmesine yardımcı olmak üzere tasarlanmıştır.
Neden Konum Bulmak Zor
Hareket eden nesnelerin üç boyutta kesin konumunu bulmak kulağa basit gelebilir; oysa pratikte şaşırtıcı derecede zordur. GPS gibi radyo sistemleri açık havada iyi çalışsa da, sinyallerin duvarlardan yansıdığı veya tamamen engellendiği şehir içi ve kapalı mekanlarda doğruluğunu yitirir. Optik kameralar ince ayrıntıları yakalayabilir, ancak standart tek lensli kameralar dünyayı iki boyuta indirger; bu da nesnelerin gerçek uzaklıklarını ayırt etmeyi zorlaştırır. Klasik stereo görüş, insan gözlerinin yaptığı gibi paralaksla derinlik bilgisi elde etmek için aralarında boşluk bulunan iki kamerayı kullanır, fakat yüksek doğruluk genellikle kameralar arasında büyük fiziksel ayrım gerektirir. Bu da böyle sistemleri kompakt uçan robotlar için hantal ve elverişsiz kılar.
Böcek Gözlerinden Öğrenmek
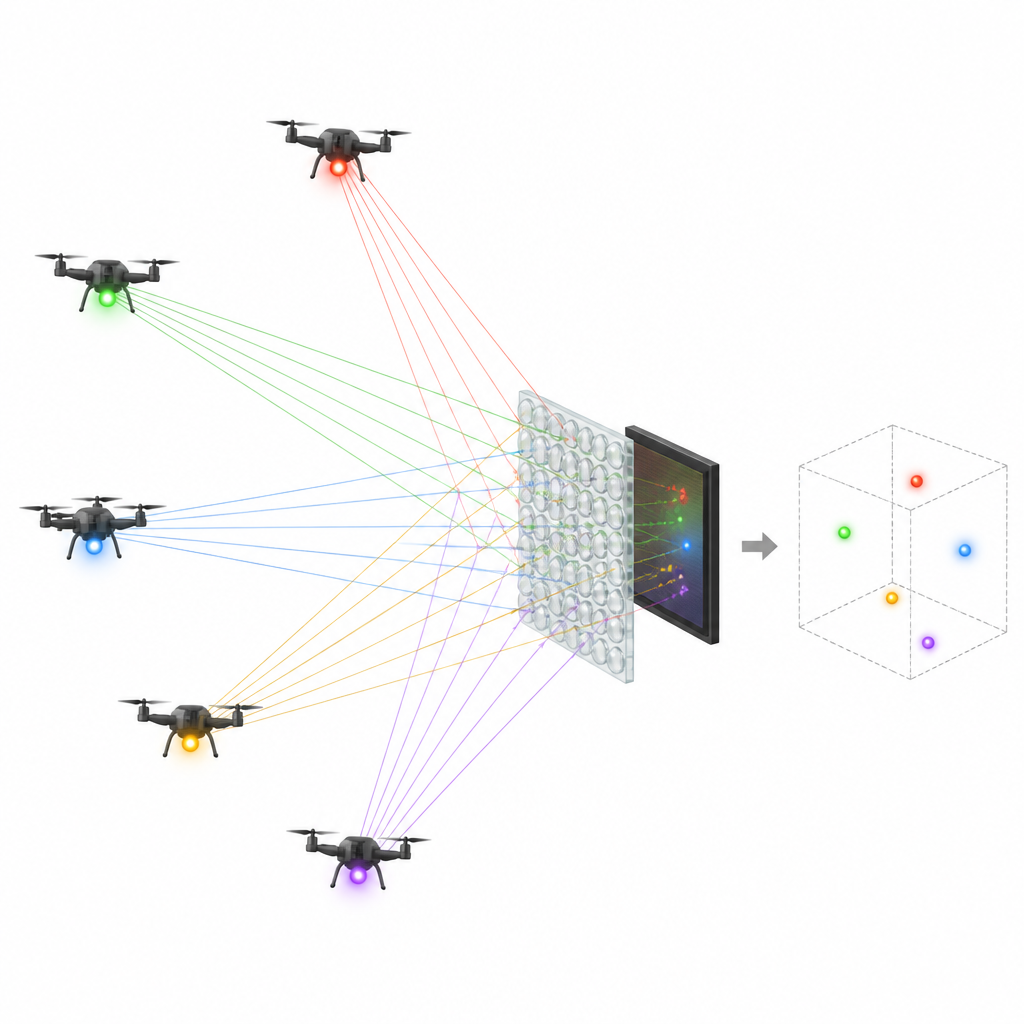
Böcekler, her biri biraz farklı yöne bakan çok sayıda küçük üniteden oluşan bileşik gözleriyle benzer bir sorunu çözer. Araştırmacılar bu fikri, bileşik meta-göz sistemi olarak adlandırdıkları düzenle taklit ettiler. Kavisli biyolojik üniteler yerine, düz bir ışık dedektörünün üzerine dizilmiş minik düz lenslerden, yani metalenslerden oluşan bir ızgara düzenlediler. Her mini lens bir alt-göz gibi davranır: bir ışık kaynağından, örneğin bir drondaki kızılötesi işaretten gelen ışık, sensör üzerinde keskin bir leke halinde odaklanır. Alt-gözler mekânda ayrılmış ve hedefi biraz farklı açılardan gördükleri için, lekelerin deseni hedefin üç boyuttaki konumuna ilişkin bilgi taşır.
Küçük Kaymaların 3B Haritalara Dönüşmesi
Sistemin özü, bu lekeler arasındaki boşlukları hassas konum tahminine dönüştüren matematiksel bir yöntemdir. Sadece birkaç alt-göz çiftine güvenmek yerine ekip, dizideki her alt-göz çifti arasından gelen paralaks bilgisini birleştiren küresel-oran algoritmasını kullanır. Bu ortalama alma yaklaşımı rastgele gürültüyü azaltır ve derinlik doğruluğunu artırır. Denemelerde araştırmacılar, her biri yalnızca 1,6 milimetre çapında olan üçe üç metalens ızgarası içeren bir prototip inşa ettiler ve bunu yüksek çözünürlüklü bir kızılötesi sensörün üzerine yerleştirdiler. Tek bir ışık yayan hedefin, cihazdan bir metre içinde iki yüzde birden az derinlik hatasıyla tespit edilebileceğini gösterdiler; bu, hedef birkaç bilinen mesafe arasında hareket ettirilirken bile sağlandı.
Aynı Anda Birden Fazla Hareketli Hedefi Takip Etmek
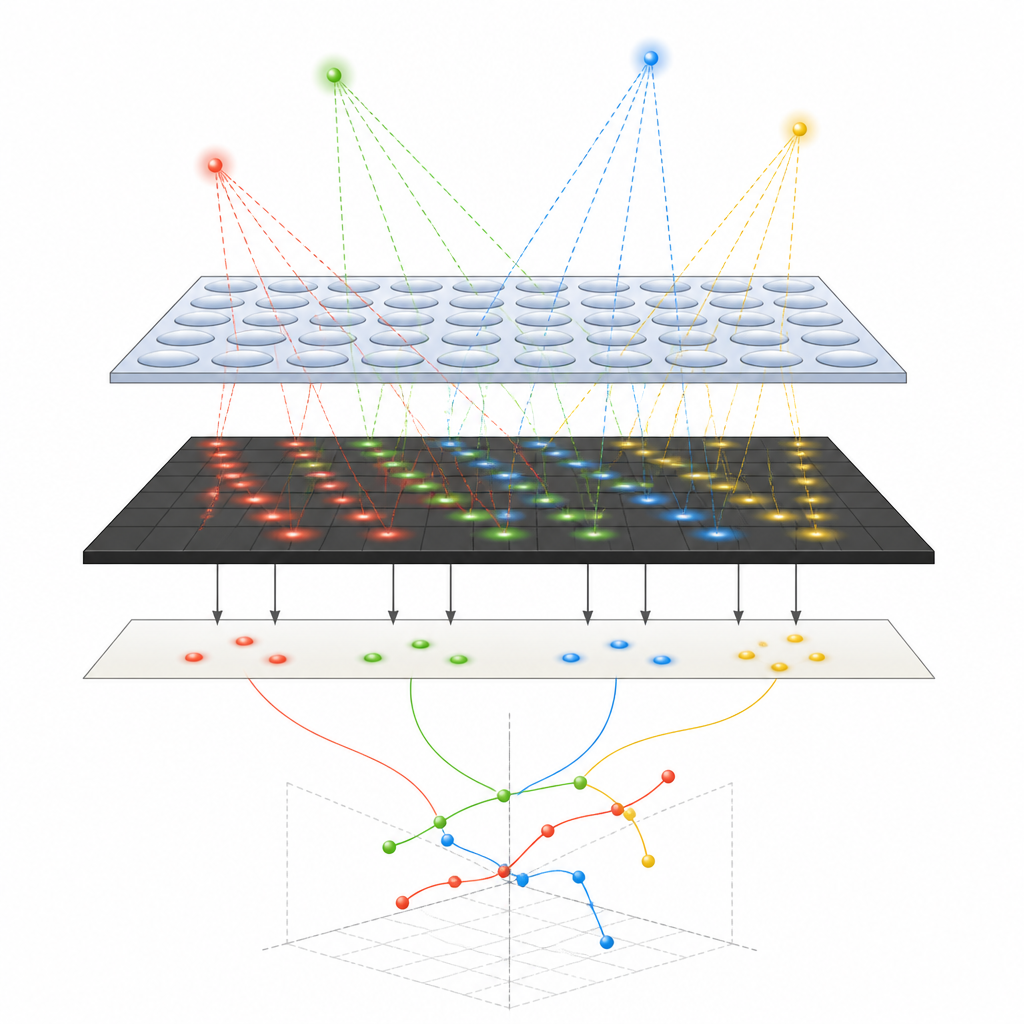
Sistemin gerçek hareketle başa çıkabildiğini göstermek için ekip, programlanabilir bir ekran kullanan çok hedefli bir simülatör oluşturdu. Ekrandaki parlak lekeler, doğrusal, eğrisel ve harf şeklindeki yollar boyunca hareket eden birkaç dronu temsil etti. Bileşik meta-göz her parlak nokta için bir dizi leke kaydetti ve algoritma bu dizileri zaman içinde gruplayıp takip etti. Hafif mekanik hizalanma hatalarını düzeltmek için bir kerelik kalibrasyon adımından sonra sistem aynı anda dört hedefe kadar üç boyutlu yolları yeniden oluşturabildi. Düz çizgiler, daireler ve daha karmaşık şekiller dahil çok sayıda testte, yeniden oluşturulan yörüngeler gerçek yörüngelerden yüzde ikiden daha az farklılık gösterdi; tipik sapmalar yarım milimetreden küçüktü.
Küçük Sensör, Büyük Olanaklar
Her şey düz lensler ve bir dedektörden oluşan ince bir yığına sıkıştırıldığı için bileşik meta-göz kompakt kalırken yüksek hassasiyet sunar. Araştırmacılar tasarımın daha geniş görüş açılarını kapsayacak, daha fazla hedefi ele alacak ve yalnızca konum değil hedef biçiminin tanınmasını da ekleyecek şekilde ölçeklendirilebileceğini öne sürüyor. Daha fazla geliştirme ve otomatik kalibrasyonla, bu tür sensörler sürüler hâlinde uçan dronların formation (düzen) halinde uçmasına yardımcı olabilir, robotların kalabalık odalarda güvenle gezinmesini sağlayabilir ve somut zekâya sahip ajanlara çevrelerindeki birçok nesnenin nerede olduğuna dair hızlı, güvenilir bir his verebilir.
Atıf: Zhang, L., Zhang, L., Zhao, X. et al. Multi-target positioning and motion tracking enabled by a compound meta-eye system. Microsyst Nanoeng 12, 203 (2026). https://doi.org/10.1038/s41378-026-01319-9
Anahtar kelimeler: 3B konumlandırma, hareket takibi, metalens, bileşik göz, dron navigasyonu