Clear Sky Science · ar
تحديد مواقع متعددة وتتبع الحركة ممكنان بواسطة نظام عين ميتا مركب
رؤية الحركة في ثلاثة أبعاد
تخيل كاميرا صغيرة تتيح لطائرة بدون طيار ألا ترى فقط أماكن وجود عدة أشياء طائرة أخرى، بل تتبع أيضاً مساراتها في الفضاء بتفاصيل على مقياس المليمتر. تقدّم هذه الدراسة جهازاً من هذا النوع، مستوحى من عيون الحشرات ومصنوع بتقنيات بصريات مسطحة متقدمة. صُمّم لمساعدة الروبوتات والطائرات بدون طيار والآلات الأخرى على التنقل في بيئات مزدحمة ومعقدة بأمان وسلاسة.
لماذا تحديد الموقع صعب
قد يبدو تحديد الموقع الدقيق للأجسام المتحركة في ثلاثة أبعاد أمراً بسيطاً، لكنه صعب بشكل مفاجئ في التطبيق العملي. تعمل أنظمة الراديو مثل نظام تحديد المواقع العالمي (GPS) جيداً في الهواء الطلق لكنها تفقد الدقة في المدن وفي الأماكن المغلقة، حيث تنعكس الإشارات عن الجدران أو تُحجب تماماً. يمكن للكاميرات الضوئية التقاط تفاصيل دقيقة، لكن الكاميرات التقليدية ذات العدسة الواحدة تسطح العالم إلى بُعدين، مما يصعّب معرفة البعد الحقيقي للأشياء. تستخدم الرؤية الستيريو التقليدية كاميرتين مفصولتين لاسترجاع العمق من فرق المنظور، كما تفعل العيون البشرية، لكن الحصول على دقة عالية غالباً ما يتطلب فصلاً مادياً كبيراً بين الكاميرتين، مما يجعل هذه الأنظمة ضخمة وغير عملية للروبوتات الطائرة المدمجة.
التعلّم من عيون الحشرات
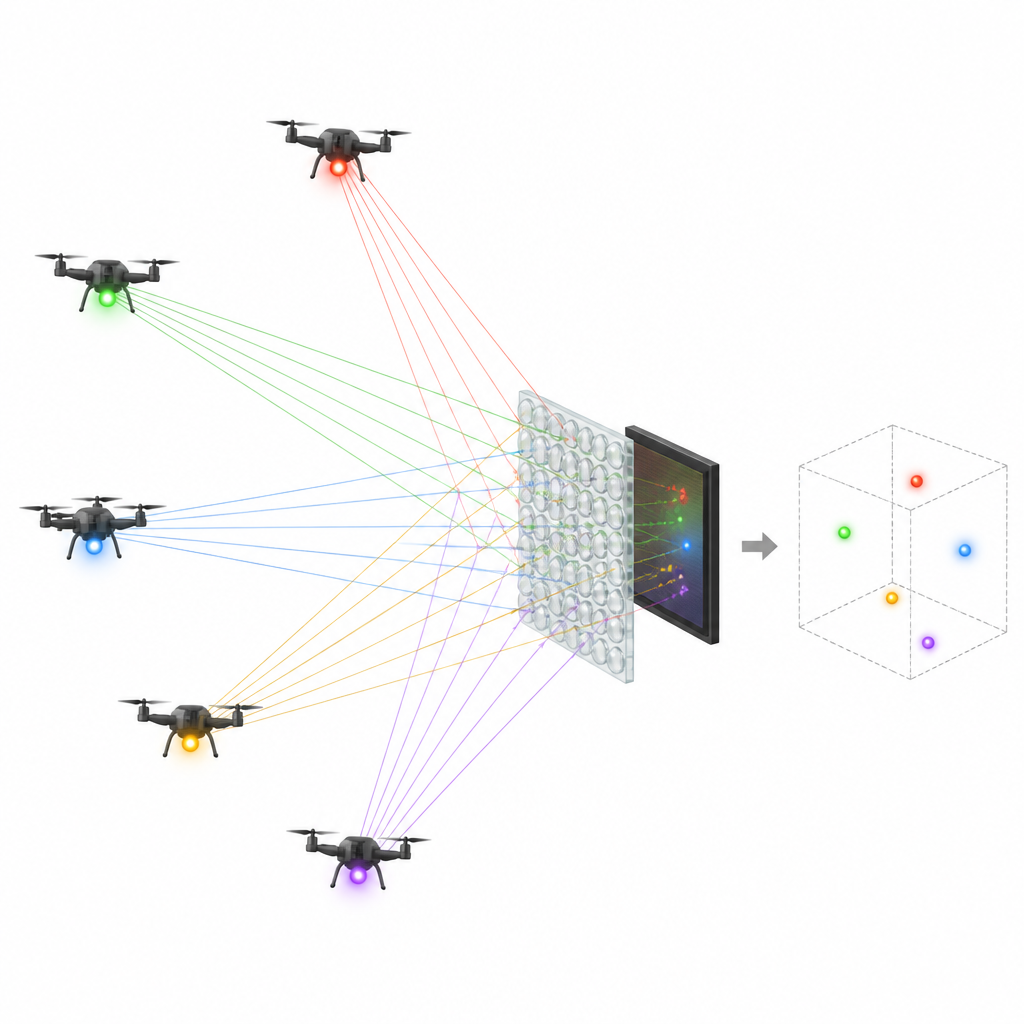
تحل الحشرات مشكلة مشابهة باستخدام عيونها المركبة، المكوّنة من العديد من الوحدات الصغيرة، كل واحدة تنظر في اتجاه مختلف قليلاً. قلد الباحثون هذه الفكرة فيما يسمونه نظام العين الميتا المركب. بدلاً من الوحدات البيولوجية المنحنية، رتبوا شبكة من العدسات المسطحة الصغيرة المعروفة بالعدسات المعدنية فوق حساس ضوئي مسطح. تعمل كل عدسة صغرى كعين فرعية: يتركز الضوء القادم من هدف مضيء، مثل منارة تحت الحمراء على طائرة بدون طيار، على بقعة حادة على الحساس. وبما أن العيون الفرعية مفصولة مكانياً وترى الهدف من زوايا مختلفة قليلاً، فإن نمط البقع يحتوي على معلومات حول مكان وجود الهدف في ثلاثة أبعاد.
تحويل الإزاحات الصغيرة إلى خرائط ثلاثية الأبعاد
جوهر النظام هو طريقة رياضية تحول الفواصل بين كل هذه البقع إلى تقدير موقع دقيق. بدلاً من الاعتماد على أزواج قليلة من العيون الفرعية، يستخدم الفريق خوارزمية نسبة كلية تجمع معلومات البرالاكس من كل زوج من العيون الفرعية في المصفوفة. يقلل هذا النهج المتوسط من الضوضاء العشوائية ويحسن دقة العمق. في الاختبارات، بنى الباحثون نموذجاً أولياً بمصفوفة ثلاث في ثلاث من العدسات المعدنية، كل منها بقطر 1.6 ملليمتر فقط، موضوع فوق حساس تحت أحمر عالي الدقة. أظهروا أن هدفاً واحداً ينبعث منه ضوء يمكن تحديد مواقعه ضمن متر من الجهاز بخطأ عمق يقل عن اثنين بالمئة، حتى مع تحريك الهدف بين عدة مسافات معروفة.
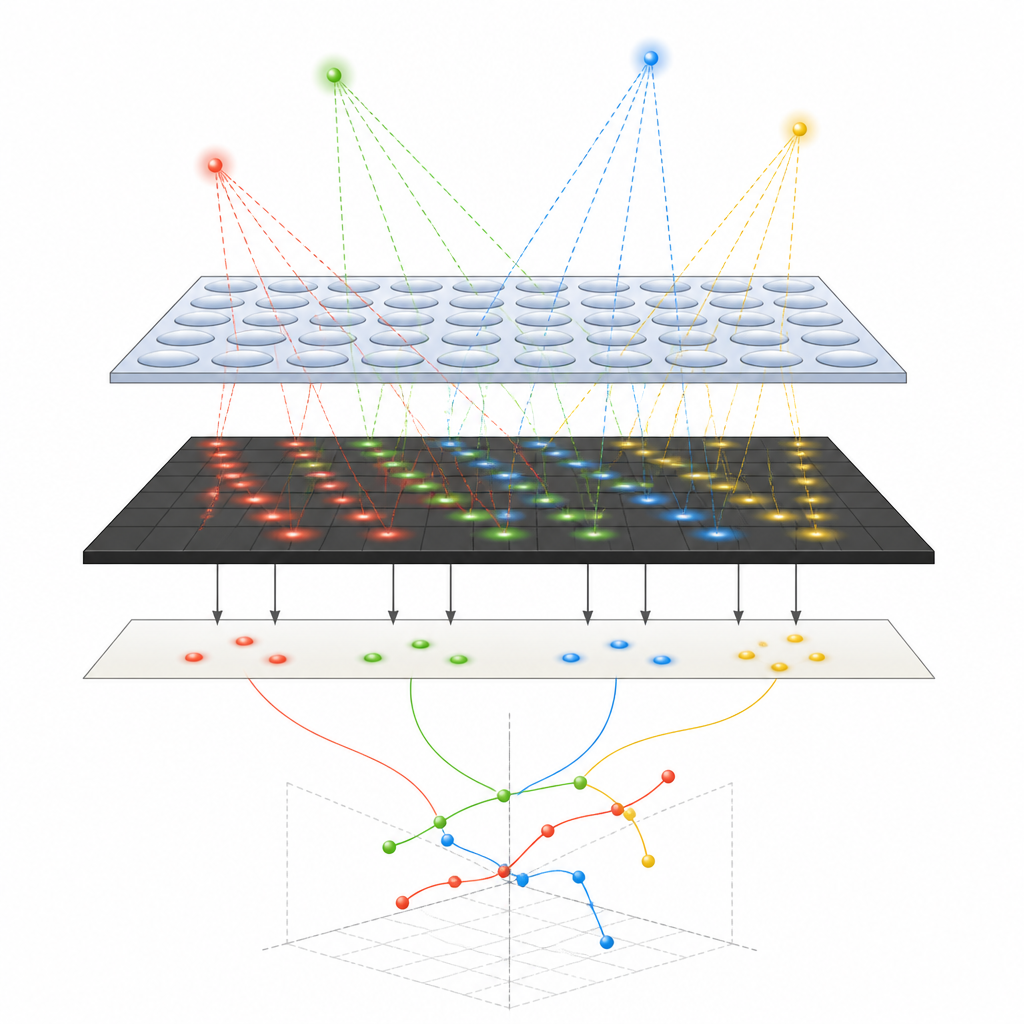
متابعة عدة أهداف متحركة في وقت واحد
لإظهار أن نظامهم قادر على التعامل مع الحركة الحقيقية، أنشأ الفريق محاكياً للأهداف المتعددة باستخدام شاشة قابلة للبرمجة. مثلت البقع المضيئة على الشاشة عدة طائرات تتحرك على مسارات مستقيمة ومنحنية وشكل حروف. سجلت العين الميتا المركبة مصفوفة من البقع لكل نقطة مضيئة، وجمّعت الخوارزمية هذه المصفوفات وتتبّعها عبر الزمن. بعد خطوة معايرة لمرة واحدة لتصحيح الانحرافات الميكانيكية الطفيفة، استطاع النظام إعادة بناء المسارات الثلاثية الأبعاد لما يصل إلى أربعة أهداف في وقت واحد. عبر اختبارات عديدة، بما في ذلك خطوط مستقيمة ودوائر وأشكال أكثر تعقيداً، اختلفت المسارات المعاد بناؤها عن المسارات الحقيقية بأقل من اثنين بالمئة، مع انحرافات نموذجية أقل من نصف مليمتر.
حساس صغير، إمكانيات كبيرة
بما أن كل شيء مُجمع في طبقة رقيقة من العدسات المسطحة وكاشف، تظل العين الميتا المركبة مدمجة مع حفاظها على دقة عالية. يجادل الباحثون بأن التصميم يمكن توسيعه لتغطية زوايا رؤية أوسع، والتعامل مع مزيد من الأهداف، وحتى إضافة تعرف على شكل الهدف وليس الموقع فقط. مع مزيد من التطوير والمعايرة الآلية، يمكن لمثل هذه الحساسات أن تساعد أسراب الطائرات بدون طيار على الطيران بتشكيل متناسق، وتمكن الروبوتات من التنقل بأمان عبر غرف مزدحمة، وتزوّد الوكلاء الأذكياء المتجسّدين بحاسة سريعة وموثوقة لمعرفة مكان وجود العديد من الأشياء في محيطهم.
الاستشهاد: Zhang, L., Zhang, L., Zhao, X. et al. Multi-target positioning and motion tracking enabled by a compound meta-eye system. Microsyst Nanoeng 12, 203 (2026). https://doi.org/10.1038/s41378-026-01319-9
الكلمات المفتاحية: تحديد مواقع ثلاثي الأبعاد, تتبع الحركة, عدسة معدنية, عين مركبة, ملاحة الطائرات بدون طيار