Clear Sky Science · it
Posizionamento multi-obiettivo e tracciamento del movimento abilitati da un sistema composto tipo meta-occhio
Vedere il movimento in tre dimensioni
Immaginate una piccola videocamera che permette a un drone non solo di vedere dove si trovano diversi altri oggetti volanti, ma anche di tracciare le loro traiettorie nello spazio con dettaglio al millimetro. Questo studio presenta proprio un dispositivo del genere, ispirato agli occhi degli insetti e realizzato con ottiche piatte d’avanguardia. È progettato per aiutare robot, droni e altre macchine a muoversi in ambienti affollati e complessi in modo sicuro e fluido.
Perché trovare la posizione è difficile
Trovare la posizione esatta di oggetti in movimento in tre dimensioni può sembrare semplice, ma in pratica è sorprendentemente arduo. Sistemi radio come il GPS funzionano bene all’aperto ma perdono precisione in città e al chiuso, dove i segnali rimbalzano sulle pareti o vengono completamente bloccati. Le telecamere ottiche possono catturare dettagli fini, tuttavia le fotocamere standard a lente singola appiattiscono il mondo in due dimensioni, rendendo difficile stabilire la reale distanza degli oggetti. La visione stereo classica usa due telecamere separate per ricavare la profondità dal parallasse, come fanno gli occhi umani, ma ottenere alta accuratezza richiede di solito una grande separazione fisica tra le camere. Ciò rende tali sistemi ingombranti e poco pratici per robot volanti compatti.
Imparare dagli occhi degli insetti
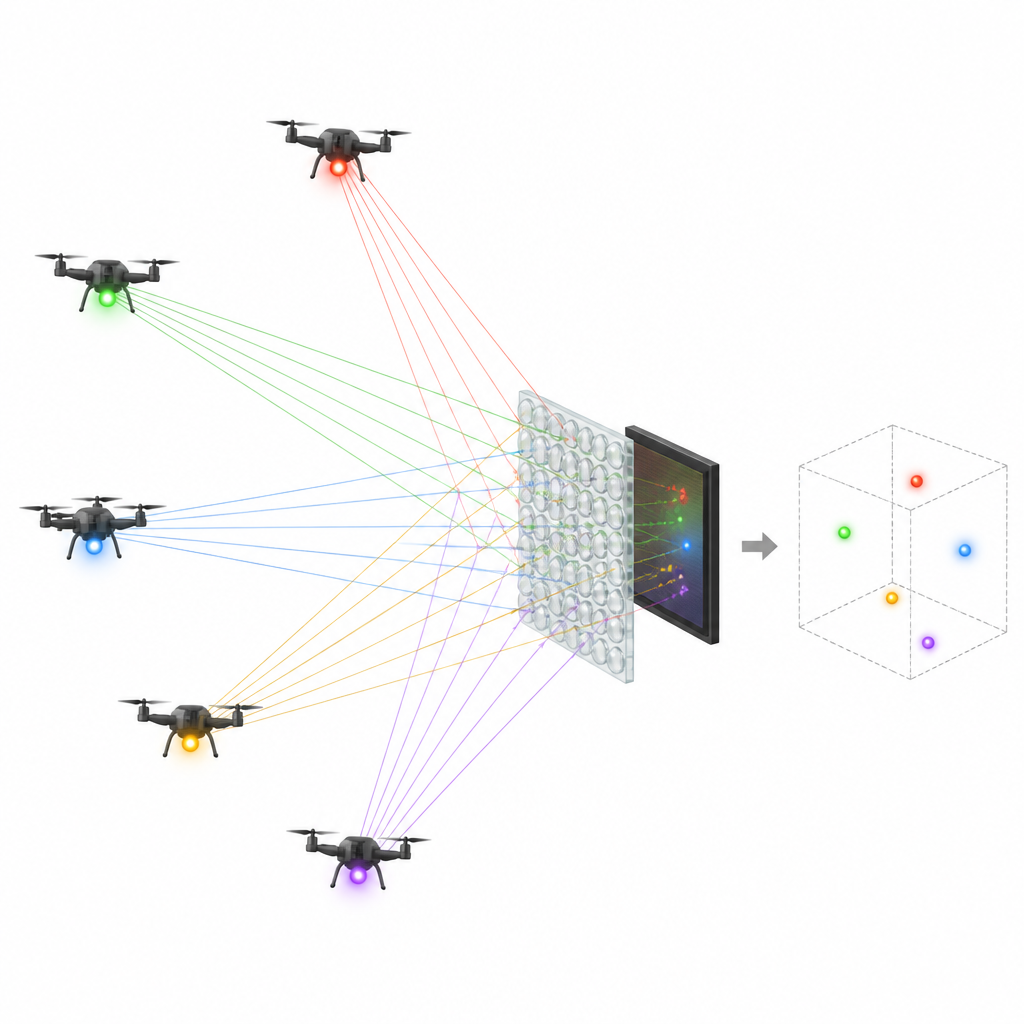
Gli insetti risolvono un problema analogo con i loro occhi composti, costituiti da molte piccole unità, ciascuna rivolta in una direzione leggermente diversa. I ricercatori hanno ripreso questa idea con quello che chiamano un sistema meta-occhio composto. Al posto delle unità biologiche curve, hanno disposto una griglia di minuscole lenti piatte, note come metalenti, sopra un sensore di luce piano. Ogni mini-lente funziona come un sotto-occhio: la luce proveniente da un bersaglio luminoso, come un faro a infrarossi su un drone, viene focalizzata in un punto nitido sul sensore. Poiché i sotto-occhi sono separati nello spazio e osservano il bersaglio da angolazioni leggermente diverse, il motivo dei punti contiene informazioni sulla posizione del bersaglio in tre dimensioni.
Trasformare piccoli spostamenti in mappe 3D
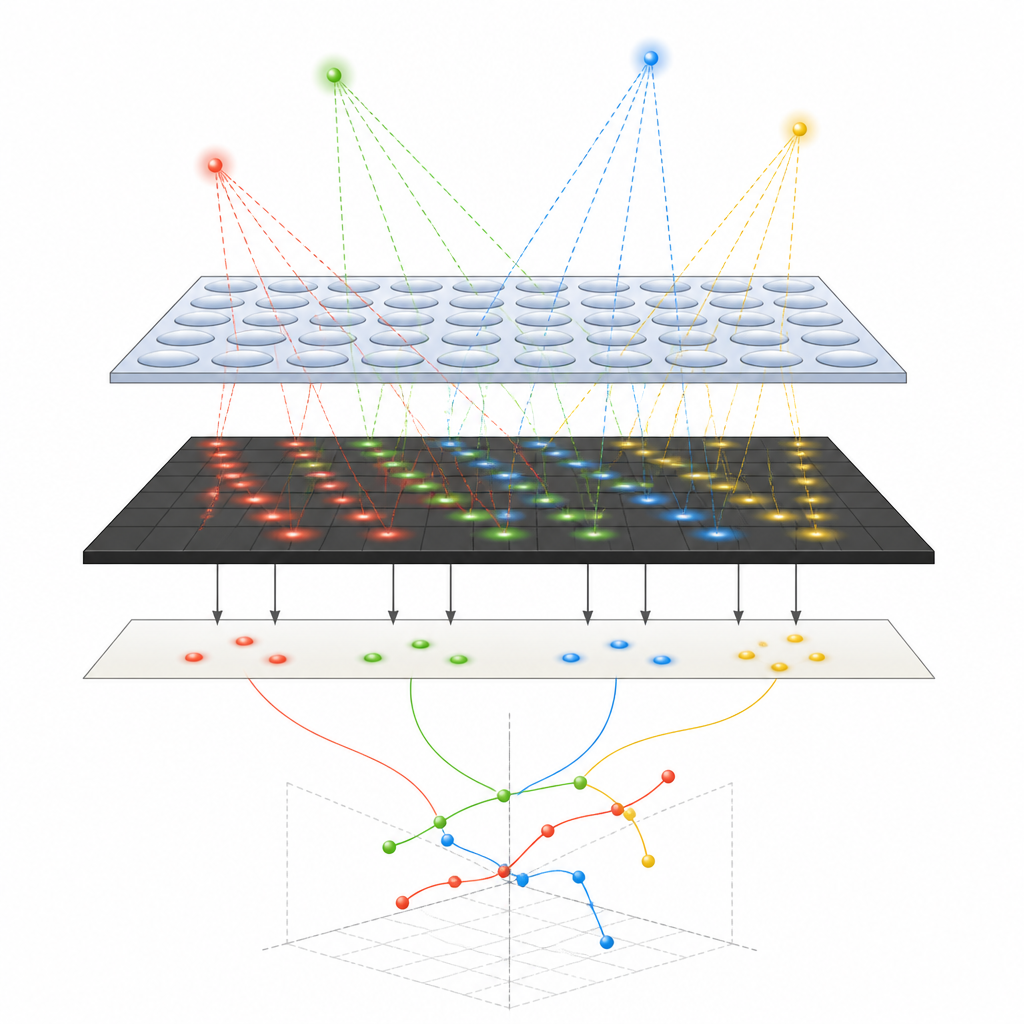
Il nucleo del sistema è un metodo matematico che converte le distanze tra tutti questi punti in una stima di posizione precisa. Invece di fare affidamento su poche coppie di sotto-occhi, il team utilizza un algoritmo a rapporto globale che combina le informazioni di parallasse di ogni coppia di sotto-occhi nell’array. Questo approccio di media riduce il rumore casuale e migliora la precisione in profondità. Nei test, i ricercatori hanno costruito un prototipo con una griglia 3x3 di metalenti, ciascuna larga solo 1,6 millimetri, posizionata sopra un sensore ad alta risoluzione per l’infrarosso. Hanno dimostrato che un singolo bersaglio emittente di luce poteva essere localizzato entro un metro dal dispositivo con un errore di profondità inferiore al due percento, anche mentre il bersaglio veniva spostato tra diverse distanze note.
Seguire molti bersagli in movimento contemporaneamente
Per dimostrare che il loro sistema può gestire il movimento reale, il team ha creato un simulatore multi-bersaglio usando un display programmabile. Punti luminosi sullo schermo rappresentavano diversi droni che si muovevano lungo traiettorie rette, curve e a forma di lettere. Il meta-occhio composto registrava un array di punti per ciascun punto luminoso, e l’algoritmo raggruppava e tracciava questi array nel tempo. Dopo un’unica calibrazione per correggere lievi disallineamenti meccanici, il sistema è stato in grado di ricostruire le traiettorie tridimensionali di fino a quattro bersagli contemporaneamente. In molti test, incluse linee rette, cerchi e forme più complesse, le traiettorie ricostruite differivano da quelle reali di meno del due percento, con deviazioni tipiche inferiori a mezzo millimetro.
Piccolo sensore, grandi possibilità
Poiché tutto è compatto in una sottile pila di lenti piatte e un rivelatore, il meta-occhio composto resta di dimensioni ridotte offrendo comunque alta precisione. I ricercatori sostengono che il progetto può essere scalato per coprire angoli di visuale più ampi, gestire più bersagli e perfino aggiungere il riconoscimento della forma del bersaglio, non solo la posizione. Con ulteriori sviluppi e calibrazione automatizzata, tali sensori potrebbero aiutare stormi di droni a volare in formazione, permettere a robot di muoversi con sicurezza in stanze affollate e fornire ad agenti intelligenti incarnati un senso rapido e affidabile di dove si trovino numerosi oggetti nell’ambiente circostante.
Citazione: Zhang, L., Zhang, L., Zhao, X. et al. Multi-target positioning and motion tracking enabled by a compound meta-eye system. Microsyst Nanoeng 12, 203 (2026). https://doi.org/10.1038/s41378-026-01319-9
Parole chiave: posizionamento 3D, tracciamento del movimento, metalente, occhio composto, navigazione dei droni