Clear Sky Science · ru
Многоточная позиционировка и отслеживание движения с помощью составной мета-оптической системы
Видеть движение в трёх измерениях
Представьте крошечную камеру, которая позволяет дрону не только обнаруживать расположение нескольких летающих объектов, но и восстанавливать их траектории в пространстве с миллиметровой точностью. В этом исследовании представлено именно такое устройство, вдохновлённое глазами насекомых и выполненное с использованием передовой плоской оптики. Оно предназначено для помощи роботам, дронам и другим машинам при безопасной и плавной навигации в загруженных, захламлённых средах.
Почему определить позицию сложно
Найти точное положение движущихся объектов в трёх измерениях кажется простой задачей, но на практике это удивительно сложно. Радиосистемы, такие как GPS, хорошо работают на открытом воздухе, но теряют точность в городах и внутри зданий, где сигналы отражаются от стен или полностью блокируются. Оптические камеры могут фиксировать тонкие детали, однако стандартные объективы искажают мир в двумерное изображение, что затрудняет оценку реальной дистанции. Классическая стереозрительная пара камер восстанавливает глубину по параллаксу, как делают человеческие глаза, но для высокой точности обычно требуется значительное расстояние между камерами. Это делает такие системы громоздкими и неудобными для компактных летающих роботов.
Учимся у насекомых
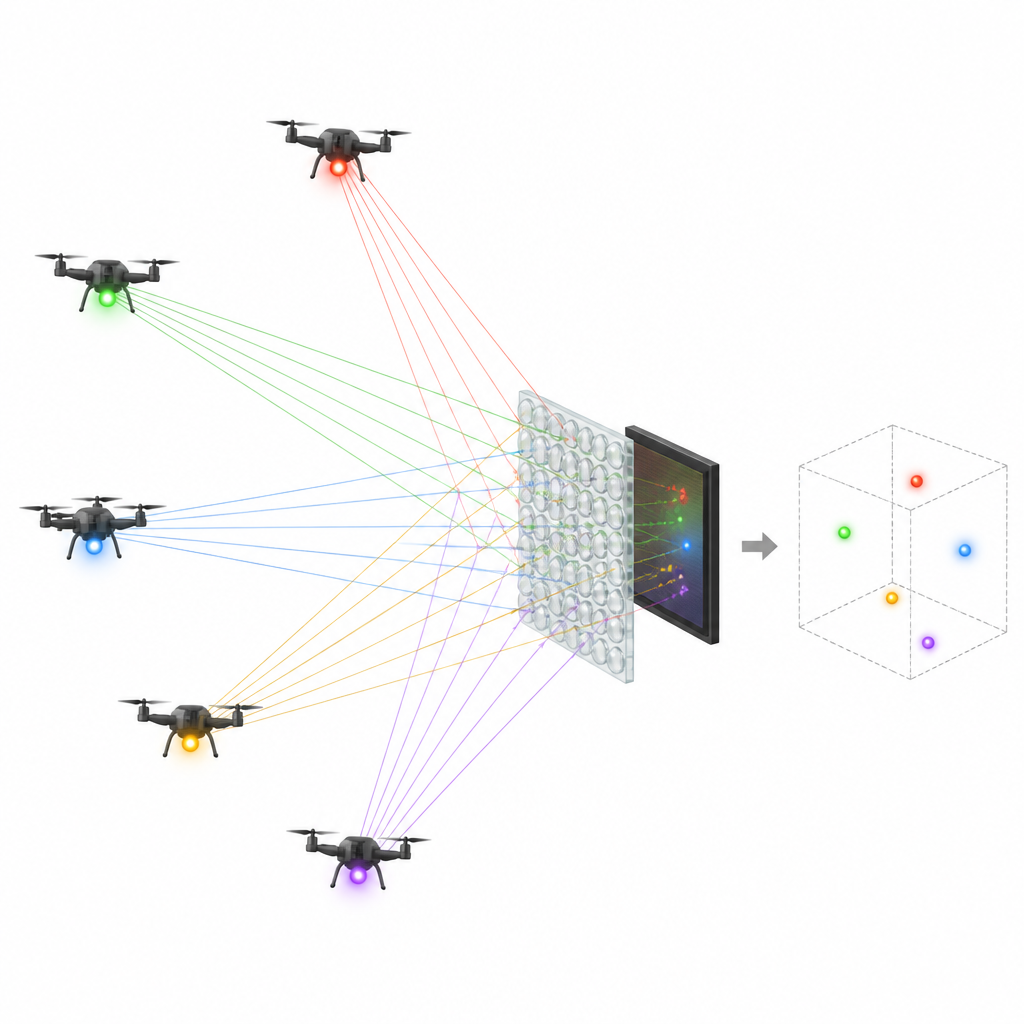
Насекомые решают схожую задачу с помощью составных глаз, которые состоят из множества маленьких единиц, каждая из которых смотрит в слегка отличном направлении. Исследователи подражали этой идее, создав то, что они называют составной мета-глазовой системой. Вместо изогнутых биологических фасеток они разместили сетку крошечных плоских линз, известных как металинзы, над плоским световым датчиком. Каждая мини-линза действует как суб-глаз: свет от светящейся метки, например инфракрасного маячка на дроне, фокусируется в резкое пятно на сенсоре. Поскольку суб-глаза разделены в пространстве и наблюдают цель под слегка разными углами, рисунок пятен содержит информацию о трёхмерном положении цели.
Преобразование малых сдвигов в 3D-карты
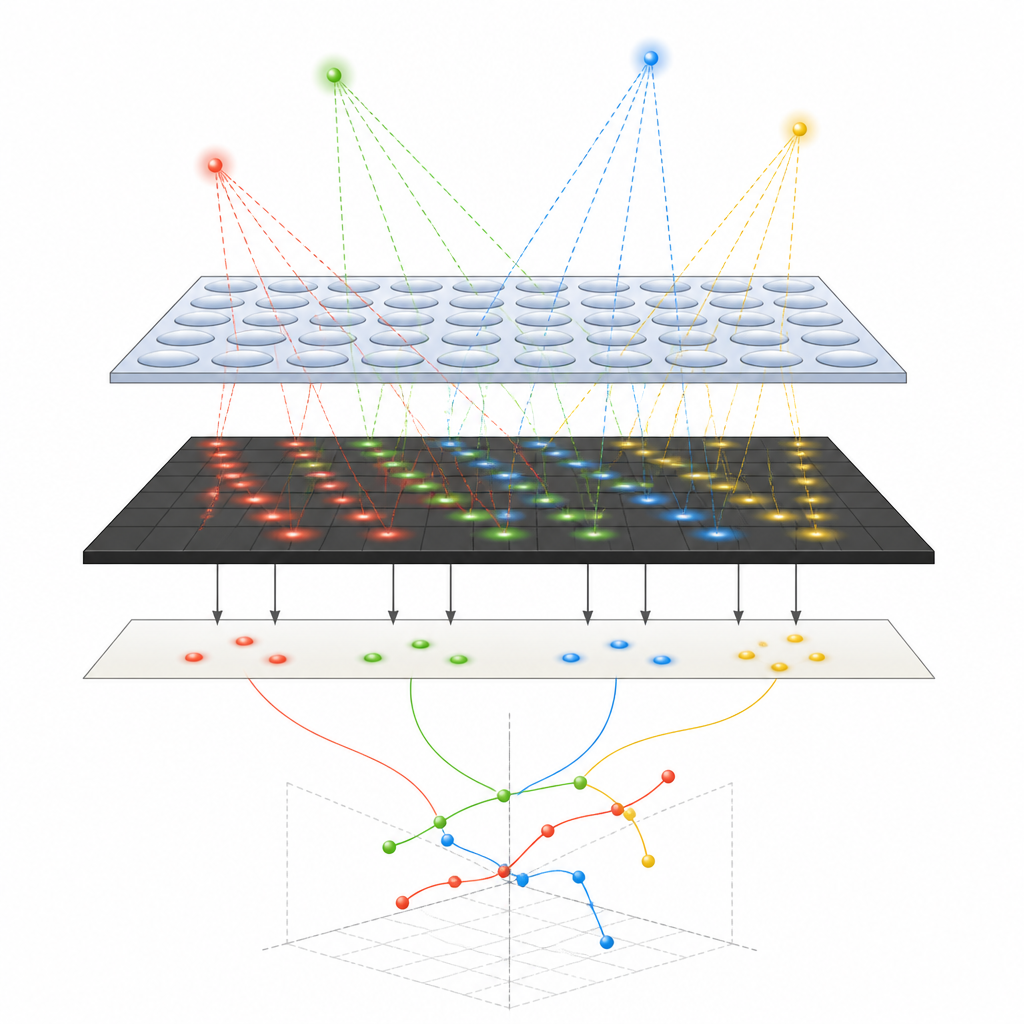
Ядром системы является математический метод, который преобразует расстояния между всеми этими пятнами в точную оценку положения. Вместо опоры на лишь несколько пар суб-глаз команда использует алгоритм глобального отношения, который объединяет информацию о параллаксе от каждой пары суб-глаз в массиве. Такой усредняющий подход снижает случайный шум и повышает точность по глубине. В тестах исследователи собрали прототип с сеткой металинз 3×3, каждая диаметром всего 1,6 миллиметра, установленную над высокоразрешающим инфракрасным сенсором. Они показали, что единичную светящуюся метку можно локализовать в пределах метра от устройства с погрешностью по глубине менее двух процентов, даже когда метка перемещалась между несколькими известными расстояниями.
Одновременное отслеживание множества движущихся целей
Чтобы продемонстрировать работу системы с реальным движением, команда создала симулятор с несколькими целями на программируемом дисплее. Яркие точки на экране имитировали несколько дронов, движущихся по прямым, криволинейным и буквенным траекториям. Составной мета-глаз записывал массив пятен для каждой яркой точки, а алгоритм группировал и отслеживал эти массивы во времени. После однократной калибровки для коррекции небольших механических смещений система смогла восстановить трёхмерные траектории одновременно до четырёх целей. В многочисленных испытаниях, включая прямые линии, окружности и более сложные формы, восстановленные траектории отличались от истинных менее чем на два процента, при типичных отклонениях менее половины миллиметра.
Малый сенсор — большие возможности
Поскольку всё упаковано в тонкую стопку плоских линз и детектора, составной мета-глаз остаётся компактным, но при этом обеспечивает высокую точность. Исследователи отмечают, что конструкцию можно масштабировать для большего угла обзора, обработки большего числа целей и даже распознавания формы цели, а не только её положения. При дальнейшем развитии и автоматизированной калибровке такие сенсоры могут помочь роям дронов лететь строем, позволить роботам безопасно лавировать в переполненных помещениях и дать воплощённым интеллектуальным агентам быстрый и надёжный способ определять положение множества объектов в их окружении.
Цитирование: Zhang, L., Zhang, L., Zhao, X. et al. Multi-target positioning and motion tracking enabled by a compound meta-eye system. Microsyst Nanoeng 12, 203 (2026). https://doi.org/10.1038/s41378-026-01319-9
Ключевые слова: 3D-позиционирование, отслеживание движения, металинза, составной глаз, навигация дронов