Clear Sky Science · zh
指尖尺度的六轴触觉界面,具备高精度力传感与位置定位,支持灵巧的人机交互
为什么指尖触觉对机器人重要
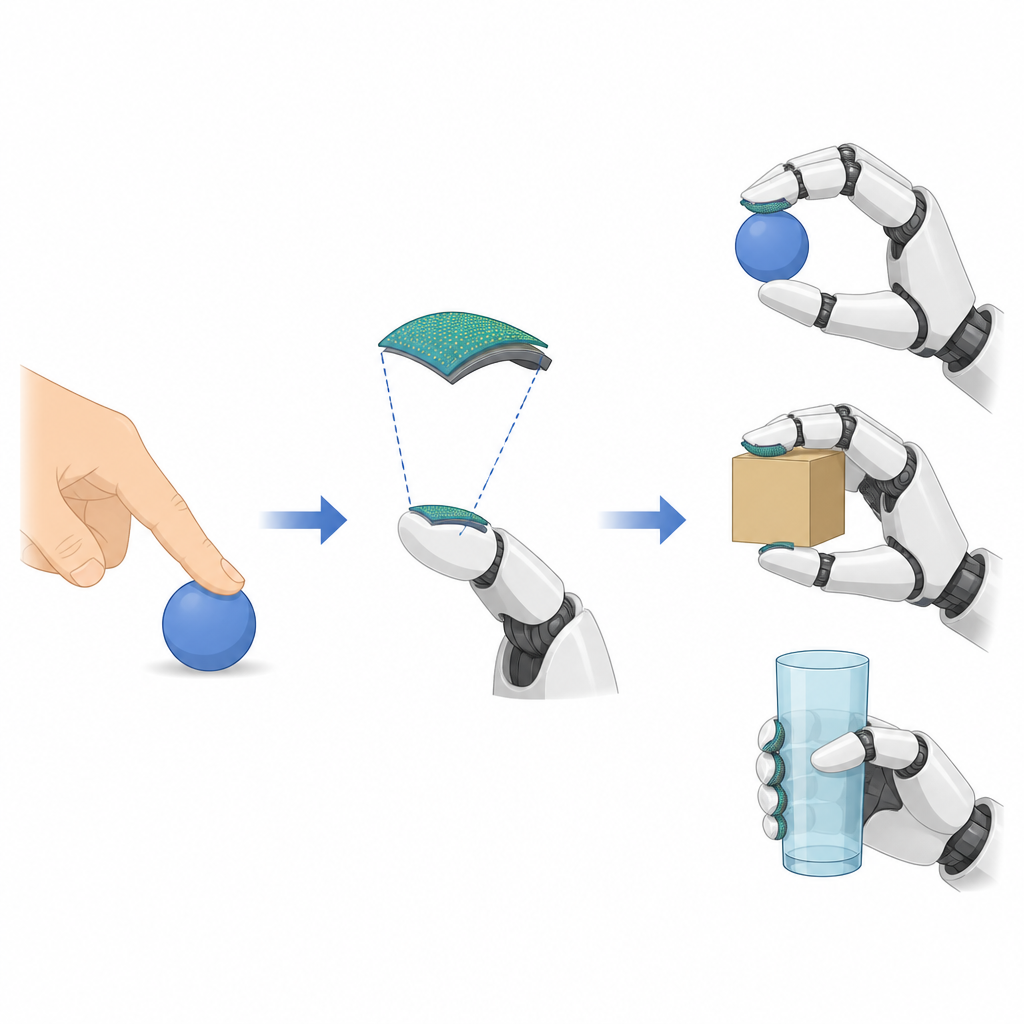
想象一下戴着厚厚的连指手套去系鞋带或插 USB 线。这就是大多数机器人今天感知世界的方式:它们动作精确,但触觉粗糙。本文介绍了 HexaTouch,一种指尖大小的触觉传感器,能让机器人更像我们一样感知,不仅能测出按压力度,还能精确判断力作用的位置和方向。这一进展可使机器人更安全、更灵巧,并能通过简单手势更容易为人所控。
机器人通常如何“感受”世界
许多现有的机器人触觉传感器在优点之间互相权衡。刚性的力传感器准确但过硬、体积大,不适合与人安全接触。更软的传感器更安全、能环抱物体,但常常只检测垂直压力,无法捕捉侧向力和扭矩。基于相机的触觉传感器能生成变形橡胶的丰富“触觉图像”,但往往比指尖大,并依赖脆弱的光学部件,在承受重载时表现欠佳。结果是,很少有系统能同时做到小巧、耐用,并能精确定位复杂力和接触位置。
无需相机的微小指尖触觉
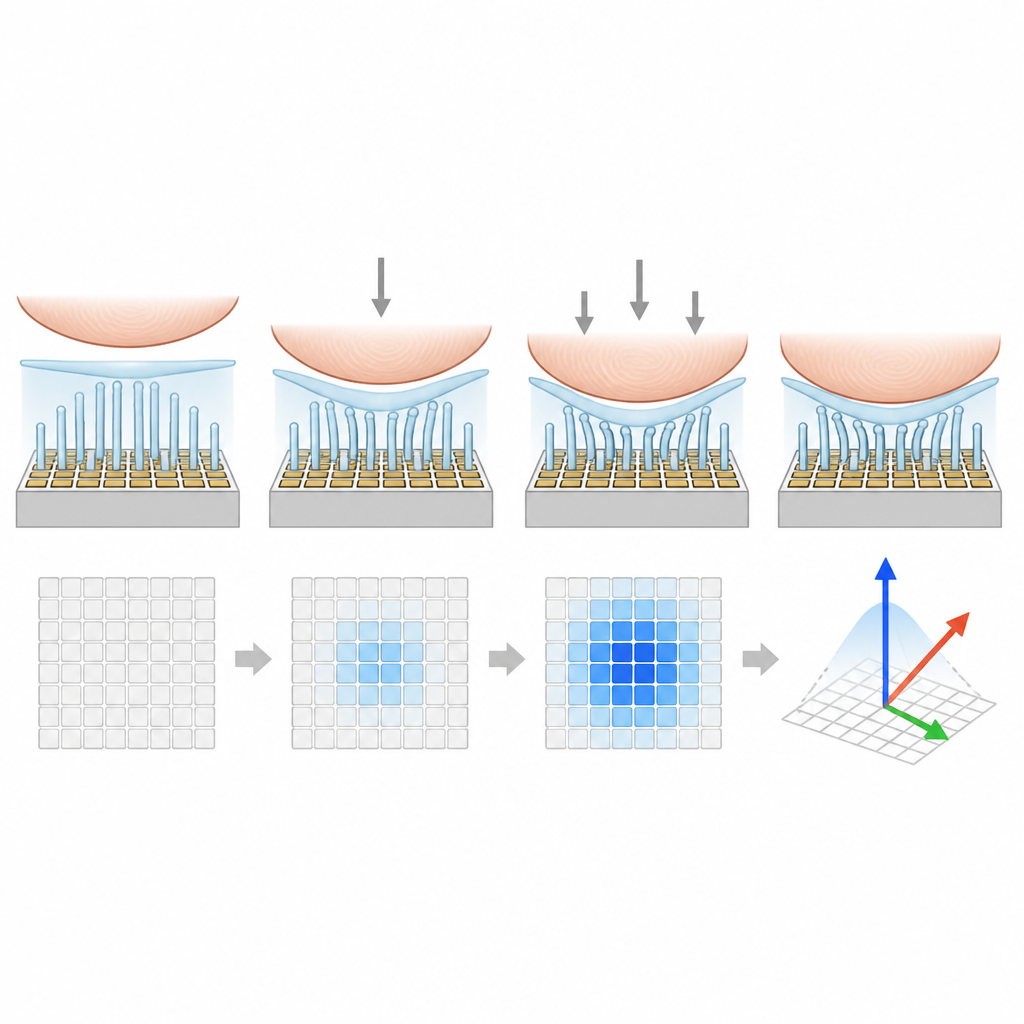
HexaTouch 通过将基于相机和电学传感的理念融合在一起,做成一个约 15×15×8 毫米的小巧指尖模块来解决这个问题。顶部是模仿人类指形的柔性弧面橡胶顶帽,便于包裹物体。在该顶帽内部隐藏着精心设计的一片微小橡胶柱森林,这些柱子的高度在表面上有变化。这些柱子被制成导电的,当受到按压时会接触到下方微芯片上密集的电容垫阵列。芯片不是拍照,而是测量每个电容垫的电容变化,形成一幅详细的灰度图,反映表面是如何被压、剪切或扭转的。
学习读取触摸模式
柱子高度的变化并非装饰。高的柱子先接触,较短的柱子会随着力的增加陆续接触,使响应覆盖更宽的载荷范围,并使不同方向和扭矩下的模式更具区别性。计算机仿真与实验表明,这种递进式结构相比均匀柱阵,对侧向推力和扭转更敏感,同时仍能承受更高的力而不易饱和。团队随后将这些触觉图像输入类似图像识别中使用的机器学习系统。深度神经网络学习将每个图样转换为六分量的力与力矩读数(沿三轴的力和三轴的转矩),以及三维接触位置。
从精细握持到无人机飞行
有了这种解码能力后,指尖成为一种快速且精确的触觉工具。测试显示,HexaTouch 对力的估计误差低于约 1.5%,并能将接触深度定位到约 0.1 毫米的精度。它在不同温湿度条件下以及经过多天重复加载后仍保持可靠工作。安装在机器人手指上时,传感器使手在预抓取阶段能调整握持,移动接触点直到物体稳定而不滑落。同样的传感也能帮助机器人在小幅错位时插入 USB 插头——通过感知力与力矩的细微变化并在发生卡阻前修正动作。
触觉作为一种新的控制语言
作者还展示了相同的指尖如何充当一种简单直观的机器控制板。通过将表面划分为若干区域并将按压方向、强度与扭转映射到指令上,人可以控制小车机器人行驶、在电子游戏中移动与开火,或操纵模拟无人机。按得更重可以改变速度或高度,转动指尖可以控制偏航。力阈值有助于忽略误触,从而保持控制的平滑。在所有这些场景中,HexaTouch 都能将细腻的指尖压力实时转换为清晰的多轴指令。
这对日常机器人意味着什么
对外行人而言,HexaTouch 就像给机器人装上了一个小而功能强大的指尖神经末梢。通过结合智能内部结构、密集的电学传感和学习到的模式识别,它将丰富、类人触觉信息压缩到一个小巧、坚固的模块中。这项工作为机器人手及其他设备指明了发展方向,使它们能更细致地感知接触的位置与方式,从而在安全协作、精密装配和自然手势控制等日常任务中更可实现。
引用: Song, Y., Wang, J., Li, Z. et al. Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions. Microsyst Nanoeng 12, 193 (2026). https://doi.org/10.1038/s41378-026-01292-3
关键词: 机器人触觉, 触觉传感器, 人机交互, 灵巧操控, 软体机器人