Clear Sky Science · en
Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions
Why fingertip feel matters for robots
Imagine trying to tie your shoes or plug in a USB cable while wearing thick mittens. That is how most robots experience the world today: they can move precisely, but their sense of touch is crude. This paper introduces HexaTouch, a fingertip-sized touch sensor that helps robots feel more like we do, sensing not only how hard they press, but also exactly where and in which direction forces act. This advance could make robots safer, more dexterous, and easier for people to control with simple gestures.
How robots usually feel the world
Many current robotic touch sensors trade one strength for another. Rigid force sensors are accurate but too hard and bulky for safe contact with people. Softer sensors are safer and can wrap around objects, but they often sense only straight-in pressure, missing sideways forces and twists. Camera-based tactile sensors can create rich "touch images" of deformed rubber, yet they tend to be larger than a fingertip and rely on delicate optics that struggle with heavy loads. The result is that few existing systems can be small, robust, and able to pinpoint complex forces and contact locations at the same time.
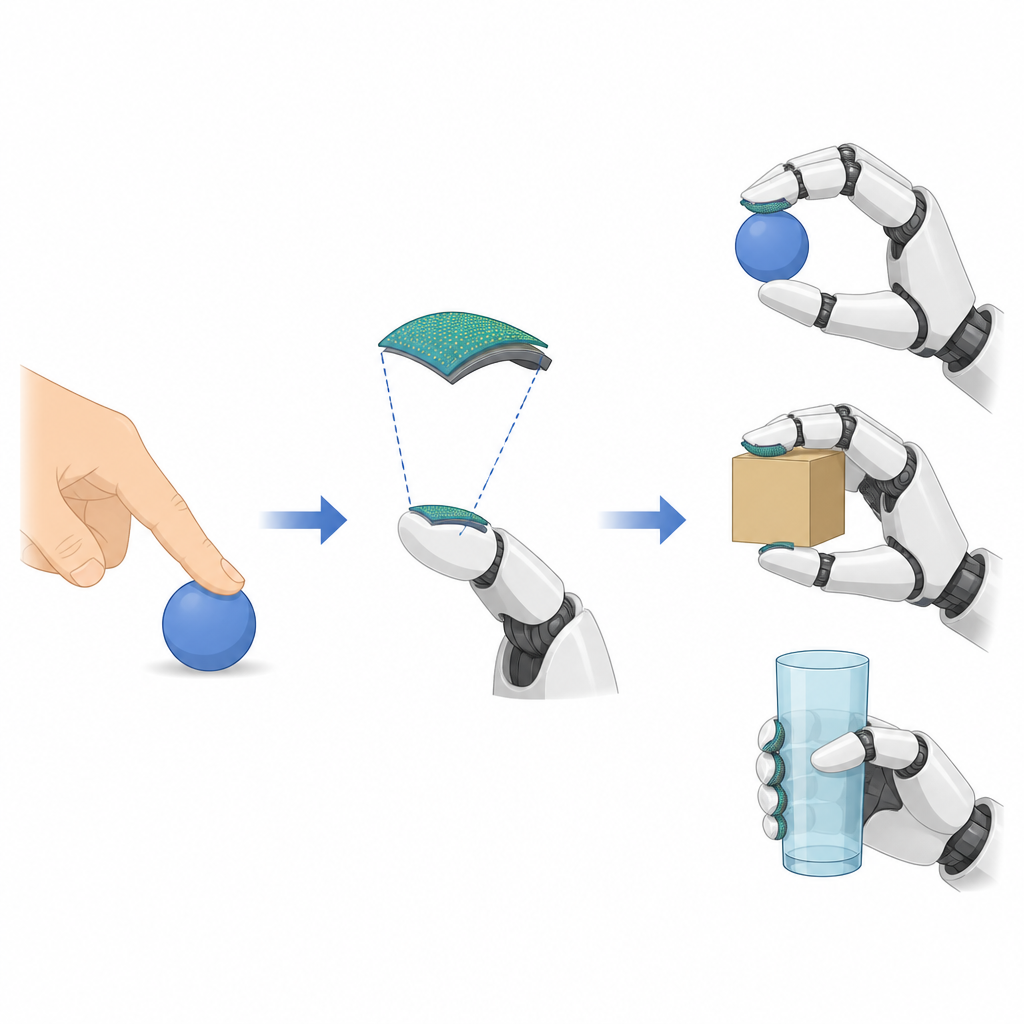
A tiny fingertip that sees touch without a camera
HexaTouch tackles this problem by blending ideas from camera-based and electrical sensing in a compact fingertip block about 15 by 15 by 8 millimeters. On top is a soft, curved rubber tip that mimics the shape of a human finger, helping it wrap around objects. Hidden inside this tip is a carefully designed forest of tiny rubber pillars whose heights vary across the surface. These pillars are made conductive so that, when pressed, they touch a dense grid of capacitor pads on a microchip beneath them. Instead of taking a picture with a camera, the chip measures changes in electrical capacitance at each pad, forming a detailed grayscale map of how the surface is being pressed, sheared, or twisted.
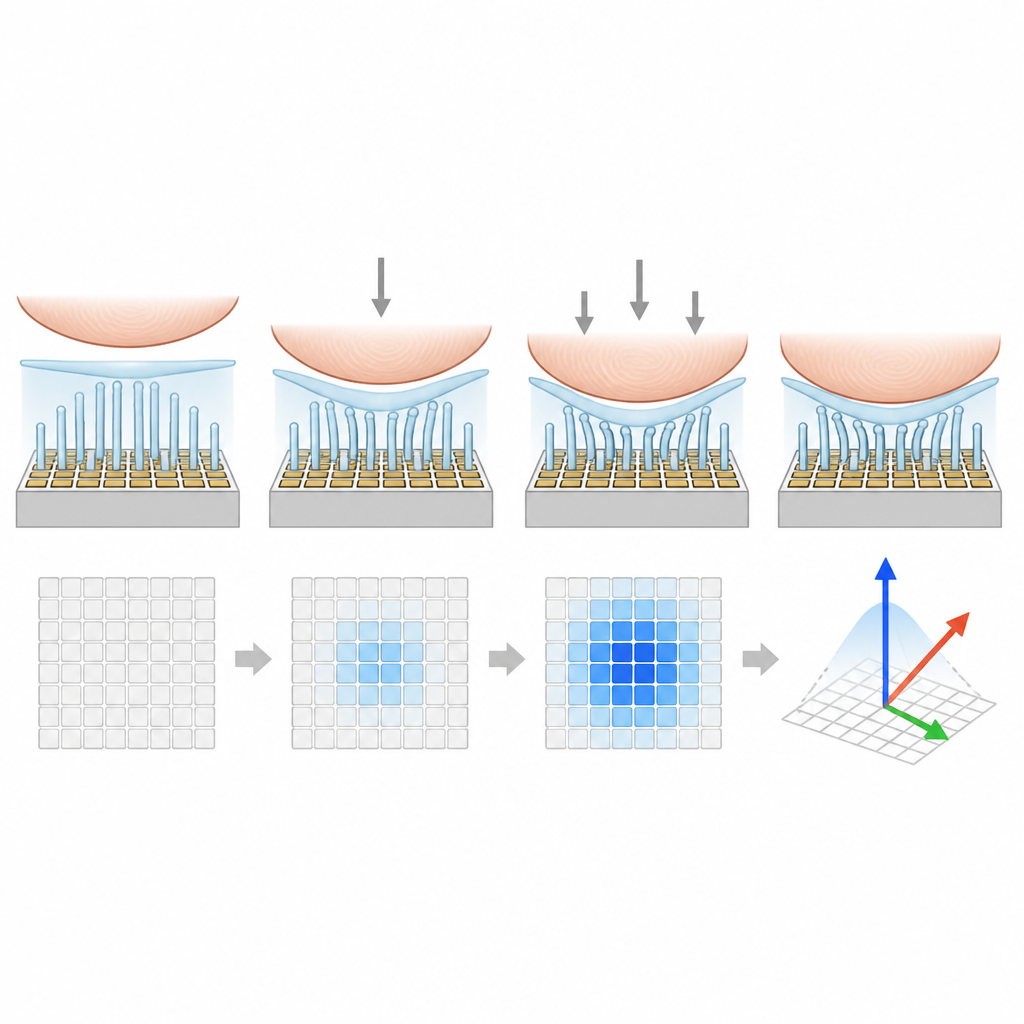
Learning to read patterns of touch
The varying heights of the pillars are not a cosmetic detail. Taller pillars touch first and shorter ones engage as force increases, spreading the response over a wide range of loads and making patterns more distinctive for different directions and torques. Computer simulations and experiments show that this graded structure makes the sensor more sensitive to sideways push and twisting than a uniform pillar array, while still handling higher forces without saturating. The team then feeds the touch images into a machine learning system similar to those used for image recognition. A deep neural network learns to translate each pattern into a six-part force and torque reading, along three directions and three rotations, along with a three-dimensional contact position.
From careful grasping to drone flight
With this decoding in place, the fingertip becomes a fast, precise touch instrument. Tests show that HexaTouch estimates forces with errors under about one and a half percent and can locate contact depth with accuracy down to a tenth of a millimeter. It keeps working reliably across a range of temperatures and humidity and after days of repeated loading. Mounted on robotic fingers, the sensor lets a hand adjust its grip during a pre-grasp phase, shifting contact points until an object is held stably instead of slipping. The same sensing helps a robot insert a USB plug despite small misalignments, by feeling subtle changes in force and torque and correcting its motion before jamming.
Touch as a new control language
The authors also show how the same fingertip can act as a simple, intuitive control pad for machines. By dividing its surface into regions and mapping push direction, strength, and twist to commands, a person can steer a small car robot, move and fire in a video game, or pilot a simulated drone. Pressing harder can change speed or height, while turning the fingertip can control yaw. Force thresholds help ignore accidental touches so control stays smooth. In all these cases, HexaTouch turns nuanced fingertip pressure into clear, multi-axis commands in real time.
What this means for everyday robotics
To a lay observer, HexaTouch is like giving robots a small but remarkably capable fingertip nerve ending. By combining a smart internal structure, dense electrical sensing, and learned pattern recognition, it packs rich, human-like touch information into a tiny, sturdy module. The work suggests a path toward robotic hands and other devices that can feel where and how they touch the world with far greater subtlety, making tasks such as safe collaboration, delicate assembly, and natural gesture-based control more achievable in everyday settings.
Citation: Song, Y., Wang, J., Li, Z. et al. Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions. Microsyst Nanoeng 12, 193 (2026). https://doi.org/10.1038/s41378-026-01292-3
Keywords: robotic touch, tactile sensor, human machine interaction, dexterous manipulation, soft robotics