Clear Sky Science · tr
İnsan–makine etkileşimlerinde ustaca kullanım için yüksek hassasiyetli kuvvet algılama ve konum belirleme özellikli parmak ucu ölçeğinde altı eksenli dokunmatik arayüz
Neden parmak ucu hissi robotlar için önemli
Kalın eldivenlerle ayakkabı bağlamaya ya da USB kablosunu takmaya çalıştığınızı hayal edin. Bugün çoğu robot dünyayı bu şekilde deneyimliyor: hareketleri hassas olabilir, ancak dokunma duyuları kabaca. Bu makale, robotların yalnızca ne kadar bastığını değil, kuvvetlerin tam olarak nerede ve hangi yönde etki ettiğini de algılayan, robotların bizim gibi hissetmesine yardımcı olan parmak ucu büyüklüğünde bir dokunma sensörü olan HexaTouch’u tanıtıyor. Bu ilerleme, robotları daha güvenli, daha ustaca ve basit hareketlerle insanların daha kolay kontrol edebileceği hale getirebilir.
Robotlar genellikle dünyayı nasıl hisseder
Mevcut birçok robotik dokunma sensörü bir avantajı başka bir dezavantajla değiştirir. Sert kuvvet sensörleri doğru ölçüm yapar ama insanlarla güvenli temas için çok sert ve hantal olur. Daha yumuşak sensörler daha güvenlidir ve nesneleri sarabilir, ancak genellikle yalnızca doğrudan uygulanan basıncı algılar, yanal kuvvetleri ve burulmaları kaçırır. Kamera tabanlı dokunma sensörleri deforme olmuş kauçuğun zengin “dokunma görüntülerini” oluşturabilir, fakat bunlar parmak ucu boyutundan büyük olma eğilimindedir ve ağır yüklerle zorlanan hassas optiklere dayanır. Sonuç olarak az sayıda mevcut sistem aynı anda küçük, sağlam ve karmaşık kuvvetleri ile temas noktalarını hassas şekilde belirleyebilir.
Kamera olmadan dokunmayı gören küçük bir parmak ucu
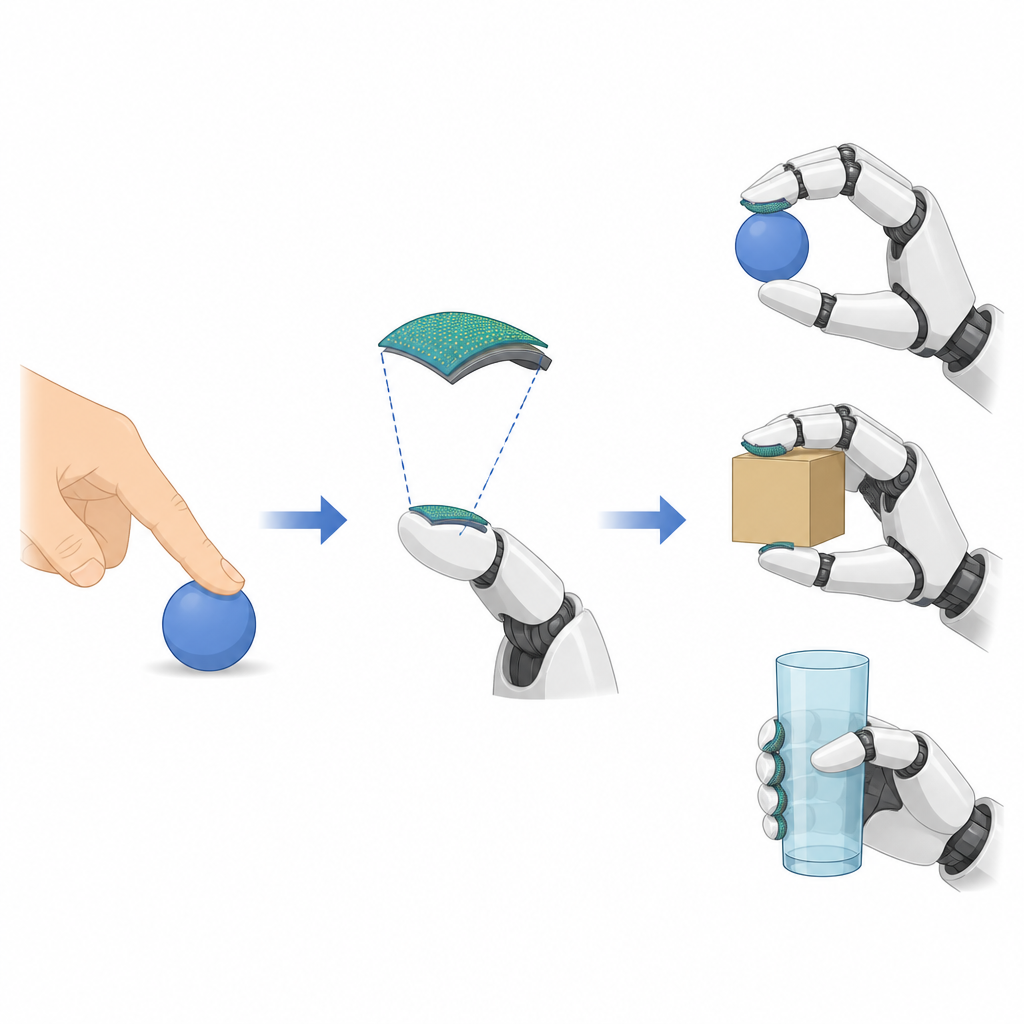
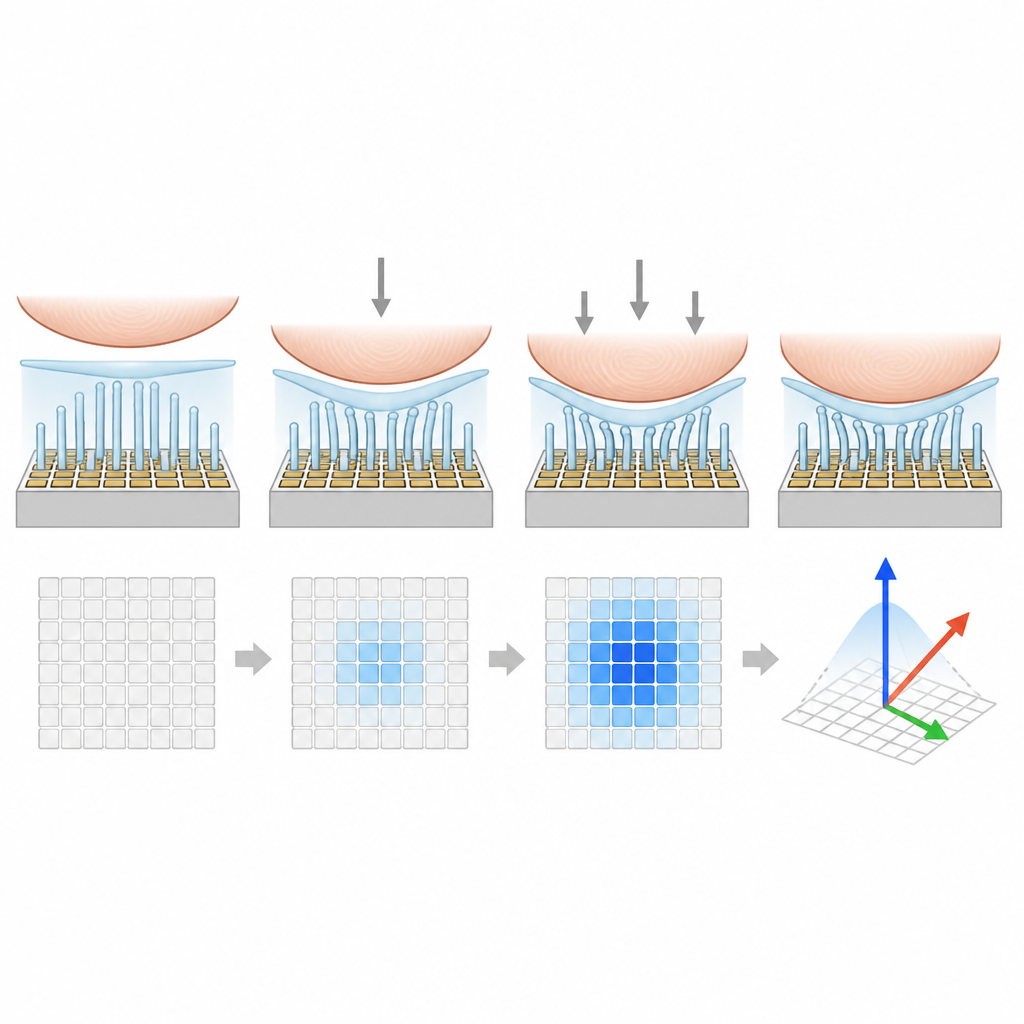
HexaTouch, bu sorunu yaklaşık 15 x 15 x 8 milimetre boyutlarında kompakt bir parmak ucu bloğunda kamera tabanlı ve elektriksel algılama fikirlerini harmanlayarak çözüyor. Üstünde insan parmağının şeklini taklit eden yumuşak, kavisli bir kauçuk uç var; bu, nesneleri sararken yardımcı oluyor. Bu ucu içinde dikkatle tasarlanmış, yüzey boyunca yüksekliği değişen bir küçük kauçuk sütun ormanı gizlenmiş. Bu sütunlar iletken hâle getirilmiş; bastırıldıklarında altlarındaki bir mikroçipte yoğun bir kondansatör pedi ızgarasına temas ediyorlar. Kamerayla fotoğraf çekmek yerine çip, her peddeki elektriksel kapasitans değişikliklerini ölçerek yüzeyin nasıl basıldığının, kaydırıldığının veya burulduğunun ayrıntılı bir gri tonlamalı haritasını oluşturuyor.
Dokunma desenlerini okumayı öğrenmek
Sütunların değişen yükseklikleri sadece estetik bir detay değil. Daha uzun sütunlar önce temas ederken, daha kısa olanlar kuvvet arttıkça devreye girer; bu da tepkiyi geniş bir yük aralığına yayar ve farklı yönler ve torklar için desenleri daha ayırt edici kılar. Bilgisayar simülasyonları ve deneyler, bu dereceli yapının sensörü tek tip sütun dizisine kıyasla yanal itme ve burulmaya karşı daha hassas kıldığını, aynı zamanda daha yüksek kuvvetleri doymaya yol açmadan karşılayabildiğini gösteriyor. Ekip daha sonra dokunma görüntülerini görüntü tanımada kullanılanlara benzer bir makine öğrenmesi sistemine veriyor. Derin bir sinir ağı, her deseni üç doğrultu ve üç rotasyon olmak üzere altı parçalı kuvvet ve tork okumalarına ve üç boyutlu temas konumuna çevirmeyi öğreniyor.
Hassas kavramadan drone uçuşuna
Bu çözümleme yerinde olduğunda, parmak ucu hızlı ve hassas bir dokunma aracı hâline geliyor. Testler, HexaTouch’un kuvvetleri yaklaşık bir buçuk yüzde’nin altında hatalarla tahmin ettiğini ve temas derinliğini onda bir milimetre düzeyine kadar hassasiyetle belirleyebildiğini gösteriyor. Sensör, bir dizi sıcaklık ve nem koşulunda ve tekrarlı yüklemeler sonrasında güvenilir şekilde çalışmaya devam ediyor. Robot parmaklarına monte edildiğinde, sensör bir elin kavrama öncesi aşamada tutuşunu ayarlamasına izin veriyor; temas noktalarını kaymayı önlemek için nesne kararlı şekilde tutulana dek kaydırıyor. Aynı algılama, küçük hizalanma hatalarına rağmen bir robotun USB fişini takmasına yardımcı oluyor; kuvvet ve torktaki ince değişiklikleri hissedip takılmadan önce hareketini düzeltiyor.
Dokunma yeni bir kontrol dili olarak
Yazarlar ayrıca aynı parmak ucunun makineler için basit ve sezgisel bir kontrol paneli olarak nasıl kullanılabileceğini gösteriyor. Yüzeyini bölgelere ayırıp itme yönünü, şiddetini ve burulmayı komutlara eşleyerek, bir kişi küçük bir araba robotu yönlendirebilir, bir video oyunda hareket edip ateş edebilir veya simüle edilmiş bir dronu pilotlayabilir. Daha güçlü basmak hız veya yüksekliği değiştirebilir, parmak ucunu döndürmek ise yalpa kontrolünü sağlar. Kuvvet eşikleri kazara dokunuşları görmezden gelmeye yardımcı olarak kontrolün pürüzsüz kalmasını sağlar. Tüm bu durumlarda HexaTouch, nüanslı parmak ucu basıncını gerçek zamanda net, çok eksenli komutlara dönüştürüyor.
Günlük robotik için bunun anlamı
Gözlemler için HexaTouch, robotlara küçük ama şaşırtıcı derecede yetenekli bir parmak ucu sinir sonu vermek gibidir. Akıllı bir iç yapı, yoğun elektriksel algılama ve öğrenilmiş desen tanımayı birleştirerek, zengin, insan benzeri dokunma bilgisini küçük, dayanıklı bir modüle sığdırıyor. Bu çalışma, robot elleri ve dünyaya nasıl ve nerede dokunduklarını çok daha ince bir şekilde hissedebilen diğer cihazlara doğru bir yol öneriyor; bu da güvenli iş birliği, hassas montaj ve doğal jest tabanlı kontrol gibi görevlerin günlük ortamlarda daha ulaşılabilir olmasını sağlayabilir.
Atıf: Song, Y., Wang, J., Li, Z. et al. Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions. Microsyst Nanoeng 12, 193 (2026). https://doi.org/10.1038/s41378-026-01292-3
Anahtar kelimeler: robotik dokunma, taktik sensör, insan makine etkileşimi, ustaca manipülasyon, yumuşak robotik