Clear Sky Science · he
ממשק מישוש בקנה מידה של קצה אצבע עם חישה ששת-צירים בעלת דיוק גבוה למדידת כוח ומיקום למעורבות אדם–מכונה דקיקה
למה תחושת קצה אצבע חשובה לרובוטים
דמיינו שאתם מנסים לקשור את הנעליים או לחבר כבל USB בזמן שאתם לובשים כפפות עבות. כך רוב הרובוטים חווים את העולם כיום: הם נעים בדיוק רב, אבל חוש המישוש שלהם גס. מאמר זה מציג את HexaTouch, חיישן מישוש בגודל קצה אצבע שעוזר לרובוטים להרגיש יותר כמו אנחנו — לא רק עד כמה הם לוחצים, אלא גם היכן בדיוק ובאיזה כיוון פועלים הכוחות. ההתקדמות הזו עשויה להפוך רובוטים לבטוחים יותר, דקים יותר וקלים יותר לשליטה באמצעות מחוות פשוטות.
איך רובוטים בדרך כלל מרגישים את העולם
חיישני מישוש רובוטיים נוכחיים רואים בתדירות אחת יתרון על חשבון אחר. חיישני כוח קשיחים מדויקים אך קשים ומגושמים מדי למגע בטוח עם בני אדם. חיישנים רכים יותר בטוחים ויכולים לעטוף חפצים, אך לעתים קרובות הם מודדים רק לחץ צירי פנימה וחסרים כוחות צדדיים וסיבובים. חיישני מישוש מבוססי מצלמה יכולים ליצור "תמונות מישוש" עשירות של גומי מעוות, אך הם נוטים להיות גדולים יותר מקצה אצבע והם מסתמכים על אופטיקה עדינה שמתקשה בעומסים כבדים. התוצאה היא שמערכות מעוטות יכולות להיות בו זמנית קטנות, עמידות ומדויקות בזיהוי כוחות מורכבים ומיקומי מגע.
קצה אצבע זעיר שרואה מגע בלי מצלמה
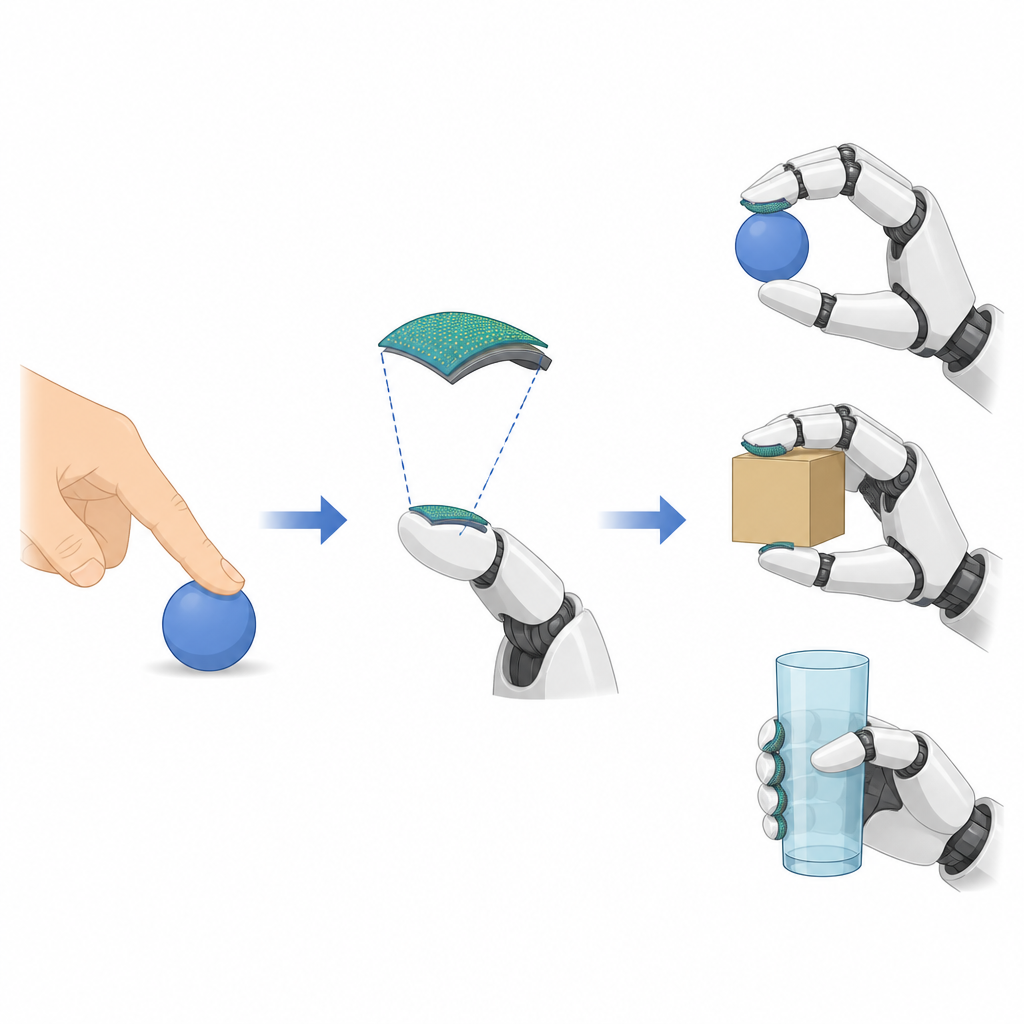
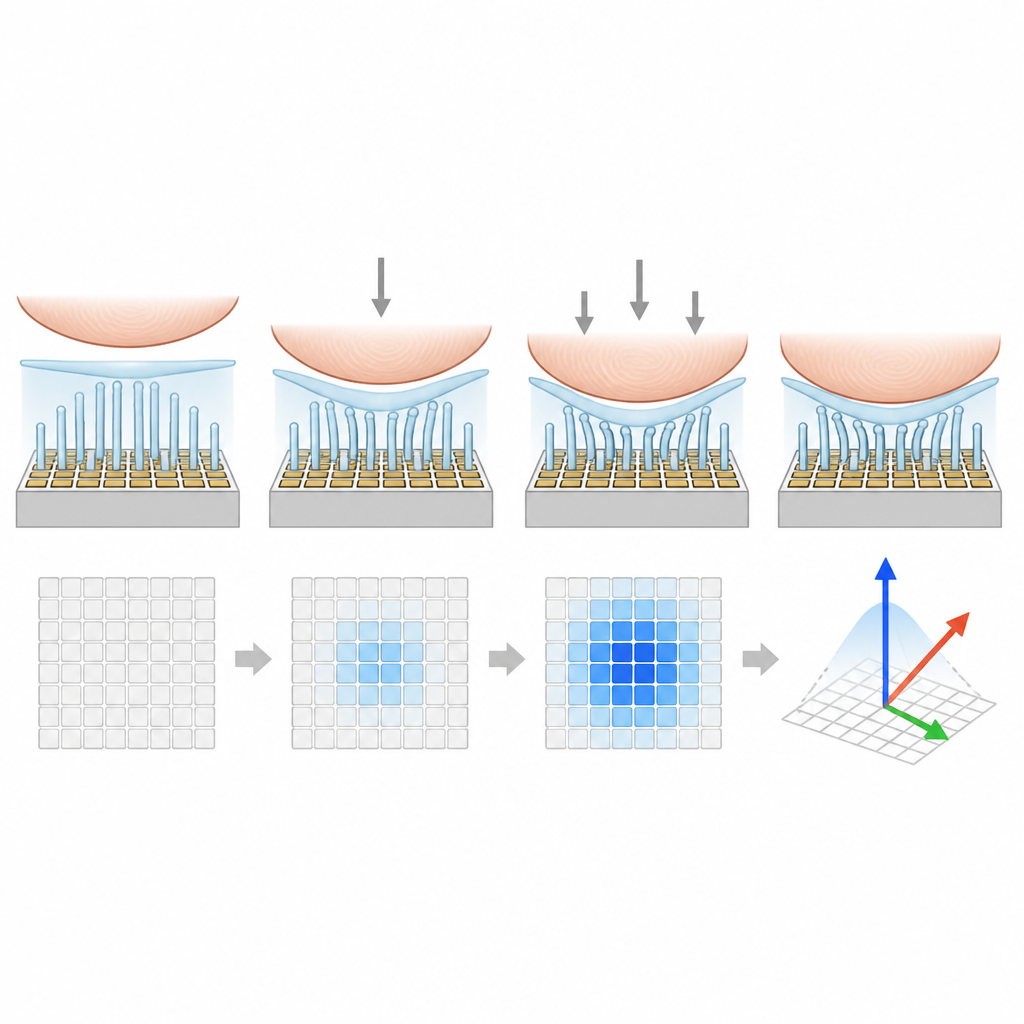
HexaTouch מתמודד עם הבעיה באמצעות שילוב רעיונות מחיישנים מבוססי-מצלמה ומחישה חשמלית בגוש קצה אצבע קומפקטי בגודל כ-15 על 15 על 8 מילימטרים. בחלקו העליון יש קצה גומי רך וקמור המחקה את צורת האצבע האנושית, ועוזר לו לעטוף חפצים. מוסתר בתוך הקצה הזה נמצא יער מעוצב של עמודוני גומי זעירים שאורכיהם משתנים על פני השטח. עמודונים אלה מוליכי חשמל כך שכאשר לוחצים אותם הם נוגעים ברשת צפופה של פאדי קבל על שבב הממוקם מתחת. במקום לצלם תמונה עם מצלמה, השבב מודד שינויים בקיבוליות החשמלית בכל פאד, וכך יוצר מפת גווני-אפור מפורטת של הדרך שבה המשטח נלחץ, משתפשף או מסובב.
ללמוד לקרוא דפוסי מגע
שונות האורכים של העמודונים אינה פרט קוסמטי. עמודונים גבוהים נוגעים ראשונים ועמודונים קצרים יותר נעמדים כשהכוח גדל, מה שמפזר את התגובה על פני טווח עומסים רחב ומבדיל טוב יותר דפוסים לפי כיוונים ומומנטים שונים. סימולציות ממוחשבות וניסויים מראים שמבנה מדורג זה הופך את החיישן רגיש יותר לדחיפות צדדיות ולסיבובים מאשר מערך עמודונים אחיד, ובו בזמן מסוגל להתמודד עם כוחות גבוהים יותר בלי רוויה. הצוות מזין אז את תמונות המגע למערכת למידת מכונה בדומה לאלה המשמשות לזיהוי תמונה. רשת עצבית עמוקה לומדת לתרגם כל דפוס לקריאת ששת רכיבי כוח ומומנט — שלושה כיוונים ושלושה סיבובים — יחד עם מיקום מגע תלת-ממדי.
מתפיסת אחיזה זהירה לטיסת רחפן
עם פענוח זה, קצה האצבע הופך לכלי מישוש מהיר ומדויק. ניסוים מראים כי HexaTouch מעריך כוחות בשגיאות מתחת לכ־1.5% ויכול לאתר עומק מגע בדיוק של עשירית המילימטר. הוא ממשיך לפעול באופן אמין בטווחי טמפרטורה ולחות שונים ואף לאחר ימים של טעינה חוזרת. כשהוא מותקן על אצבעות רובוטיות, החיישן מאפשר ליד להתאים את האחיזה במהלך שלב טרום-אחיזה, להזיז נקודות מגע עד שהחפץ מוחזק בצורה יציבה במקום להחליק. החישה הזו גם מסייעת לרובוט להכניס תקע USB למרות סטיות מזעריות, על ידי הרגשת שינויים עדינים בכוח ובמומנט ותיקון התנועה לפני התקעות.
מגע כשפת פיקוד חדשה
המחברים מראים גם איך אותו קצה אצבע יכול לשמש כפד בקרה פשוט ואינטואיטיבי למכונות. על ידי חלוקת המשטח לאזורים ומיפוי כיוון הדחיפה, העוצמה והסיבוב לפקודות, אדם יכול לנווט מכונית רובוטית קטנה, לזוז ולירות במשחק וידאו או לטוס ברחפן ממוחשב. לחיצה חזקה יותר יכולה לשנות מהירות או גובה, בעוד סיבוב הקצה שולט בעקיפה (yaw). ספי כוח עוזרים להתעלם ממגעים מקריים כך שהשליטה נשארת חלקה. בכל המקרים האלה, HexaTouch הופך לחץ עדין של קצה אצבע לפקודות ברורות מרובת-צירים בזמן אמת.
מה זה אומר לרובוטיקה יומיומית
לעיני משתמש מן השורה, HexaTouch הוא כמו מתן קצה עצב קטן אך מיומן לאצבע של רובוט. על ידי שילוב מבנה פנימי חכם, חישה חשמלית צפופה וזיהוי תבניות למוד, הוא מכניס מידע מישוש עשיר בסגנון אנושי למודול זעיר ועמיד. העבודה מציעה דרך לידי רובוטים וידיים רובוטיות שיכולות להרגיש היכן ואיך הן נוגעות בעולם בעדינות רבה יותר, מה שיקל על ביצוע משימות כגון שיתוף פעולה בטוח, הרכבה עדינה ושליטה טבעית מבוססת מחוות בסביבות יומיומיות.
ציטוט: Song, Y., Wang, J., Li, Z. et al. Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions. Microsyst Nanoeng 12, 193 (2026). https://doi.org/10.1038/s41378-026-01292-3
מילות מפתח: מגע רובוטי, חיישן מישוש, אינטראקציה אדם–מכונה, תמרון דק, רובוטיקה רכה