Clear Sky Science · nl
Vingertop-schaal zespasige tactiele interface met precisiekrachtmeting en positielokalizatie voor vakkundige mens–machine interacties
Waarom vingertopgevoel belangrijk is voor robots
Stel je voor dat je je veters moet strikken of een USB-kabel moet aansluiten terwijl je dikke wanten draagt. Zo ervaart de meeste robots de wereld vandaag: ze kunnen zich precies bewegen, maar hun gevoel voor aanraking is grof. Dit artikel introduceert HexaTouch, een vingertopformaat aanrakingsensor die robots helpt meer te voelen zoals wij: niet alleen hoe hard ze duwen, maar ook precies waar en in welke richting krachten werken. Deze vooruitgang kan robots veiliger, behendiger en makkelijker bestuurbaar met eenvoudige gebaren maken.
Hoe robots gewoonlijk de wereld voelen
Veel huidige tactiele robotsensoren ruilen het ene voordeel voor het andere. Starre krachtsensoren zijn nauwkeurig maar te hard en log voor veilig contact met mensen. Zachtere sensoren zijn veiliger en kunnen rondom objecten sluiten, maar ze meten vaak alleen recht naar binnen gerichte druk en missen zijwaartse krachten en torsies. Camera-gebaseerde tactiele sensoren kunnen rijke "aanraakbeelden" van vervormd rubber maken, maar ze zijn meestal groter dan een vingertop en vertrouwen op fragiele optiek die moeite heeft met zware belastingen. Het gevolg is dat weinig bestaande systemen tegelijk klein, robuust en in staat zijn om complexe krachten en contactlocaties nauwkeurig te lokaliseren.
Een kleine vingertop die aanraking ziet zonder camera
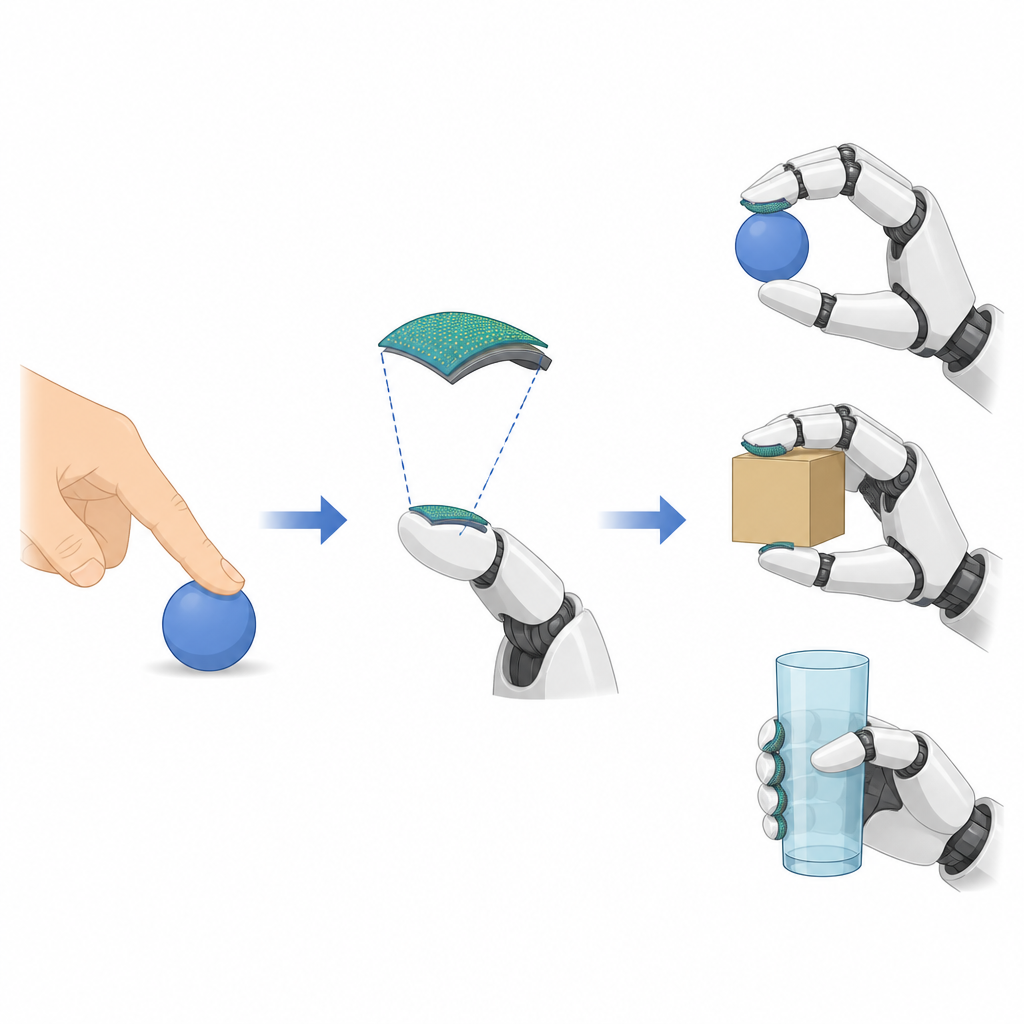
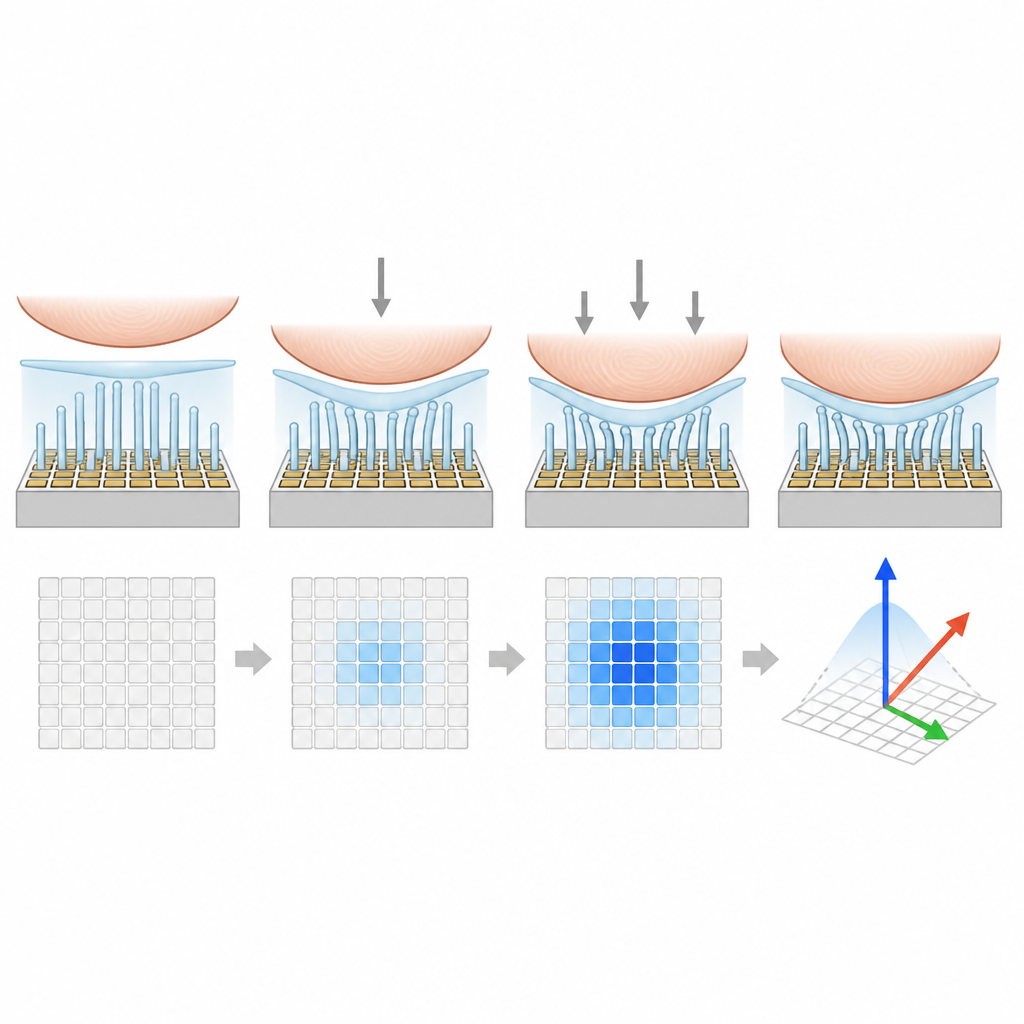
HexaTouch pakt dit probleem aan door ideeën uit camera-gebaseerde en elektrische sensortechnieken te combineren in een compact vingertopblok van ongeveer 15 bij 15 bij 8 millimeter. Bovenop zit een zachte, gebogen rubberen punt die de vorm van een menselijke vinger nabootst en helpt objecten te omsluiten. Verborgen in deze tip bevindt zich een zorgvuldig ontworpen bosje van kleine rubberen zuiltjes waarvan de hoogtes over het oppervlak variëren. Deze zuiltjes zijn geleidbaar gemaakt zodat ze bij indrukken contact maken met een dicht raster van condensatorpads op een microchip eronder. In plaats van een foto met een camera te nemen, meet de chip veranderingen in elektrische capaciteit per pad en vormt zo een gedetailleerde grijstintenkaart van hoe het oppervlak wordt ingedrukt, verschoven of verdraaid.
Leren patronen van aanraking te lezen
De variërende hoogtes van de zuiltjes zijn geen cosmetisch detail. Hogere zuiltjes maken eerst contact en kortere zuiltjes komen erbij naarmate de kracht toeneemt, waardoor de respons zich over een breed bereik van belastingen verspreidt en patronen onderscheidender worden voor verschillende richtingen en koppel. Computersimulaties en experimenten tonen aan dat deze gegradeerde structuur de sensor gevoeliger maakt voor zijwaartse duw en torsie dan een uniform zuiltjesraster, terwijl hij nog steeds hogere krachten kan verdragen zonder te verzadigen. Het team voert vervolgens de aanraakbeelden in een machine learning-systeem dat lijkt op die gebruikt voor beeldherkenning. Een diep neuraal netwerk leert elk patroon te vertalen naar een zesdelige kracht- en koppelmeting, langs drie richtingen en drie rotaties, samen met een driedimensionale contactpositie.
Van zorgvuldig grijpen tot dronevlucht
Met deze decodering wordt de vingertop een snel, nauwkeurig aanrakingsinstrument. Tests laten zien dat HexaTouch krachten schat met fouten onder ongeveer anderhalf procent en contactdiepte kan lokaliseren met een nauwkeurigheid tot een tiende millimeter. Hij blijft betrouwbaar werken over een reeks temperaturen en luchtvochtigheid en na dagen van herhaalde belasting. Gemonteerd op robotvingers stelt de sensor een hand in staat zijn greep aan te passen tijdens een pre-grijp fase, contactpunten te verschuiven totdat een object stabiel wordt vastgehouden in plaats van weg te glijden. Dezelfde sensing helpt een robot een USB-stekker in te brengen ondanks kleine misaligneringen, door subtiele veranderingen in kracht en koppel te voelen en zijn beweging te corrigeren voordat er vastlopen optreedt.
Aanraking als een nieuwe bestuurtaal
De auteurs tonen ook aan hoe dezelfde vingertop kan fungeren als een eenvoudige, intuïtieve bedieningspad voor machines. Door het oppervlak in regio’s te verdelen en duwrichting, sterkte en draaiing aan commando’s te koppelen, kan een persoon een kleine autorobot sturen, bewegen en vuren in een videogame, of een gesimuleerde drone besturen. Harder drukken kan snelheid of hoogte veranderen, terwijl het draaien van de vingertop yaw kan regelen. Krachtdrempels helpen toevallige aanrakingen te negeren zodat de besturing vloeiend blijft. In al deze gevallen zet HexaTouch genuanceerde vingertopdruk om in duidelijke, meerassige commando’s in realtime.
Wat dit betekent voor alledaagse robotica
Voor een leek is HexaTouch als het geven van een kleine maar opmerkelijk capabele vingertopzenuw aan robots. Door een slimme interne structuur, dichte elektrische sensing en geleerd patroonherkenning te combineren, verpakt het rijke, mensachtige aanraakinformatie in een klein, robuust module. Het werk wijst op een pad naar robotarmen en andere apparaten die kunnen voelen waar en hoe ze de wereld aanraken met veel grotere subtiliteit, waardoor taken zoals veilige samenwerking, delicate assemblage en natuurlijke gebaar-gebaseerde besturing beter haalbaar worden in alledaagse situaties.
Bronvermelding: Song, Y., Wang, J., Li, Z. et al. Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions. Microsyst Nanoeng 12, 193 (2026). https://doi.org/10.1038/s41378-026-01292-3
Trefwoorden: robotische aanraking, tactiele sensor, mens-machine interactie, behendige manipulatie, soft robotics