Clear Sky Science · de
Sechachsiger taktiler Sensor in Fingertippgröße mit hochpräziser Kraftmessung und Positionslokalisierung für geschickte Mensch–Maschine-Interaktionen
Warum Fingertippgefühl für Roboter wichtig ist
Stellen Sie sich vor, Sie müssten Ihre Schuhe zubinden oder ein USB-Kabel einstecken, während Sie dicke Fäustlinge tragen. So nehmen die meisten Roboter die Welt heute wahr: Sie können sich präzise bewegen, aber ihr Tastsinn ist grob. Dieser Artikel stellt HexaTouch vor, einen taktilen Sensor in Fingertippgröße, der Robotern hilft, mehr wie wir zu fühlen, indem er nicht nur misst, wie stark sie drücken, sondern auch genau, wo und in welche Richtung Kräfte wirken. Dieser Fortschritt könnte Roboter sicherer, geschickter und für Menschen leichter durch einfache Gesten steuerbar machen.
Wie Roboter die Welt üblicherweise wahrnehmen
Viele derzeitige robotische Tastsensoren tauschen eine Stärke gegen eine andere ein. Starre Kraftsensoren sind genau, aber zu hart und klobig für sicheren Kontakt mit Menschen. Weichere Sensoren sind sicherer und können sich um Objekte legen, erfassen jedoch oft nur direkten Druck und übersehen seitliche Kräfte und Drehungen. Kamerabasierte taktile Sensoren können reichhaltige „Berührungsbilder“ deformierten Gummis erzeugen, sind aber in der Regel größer als ein Fingertipp und abhängig von empfindlicher Optik, die bei hohen Lasten Probleme bekommt. Daraus folgt, dass nur wenige bestehende Systeme gleichzeitig klein, robust und in der Lage sind, komplexe Kräfte und Kontaktorte präzise zu bestimmen.
Ein winziger Fingertipp, der ohne Kamera fühlt
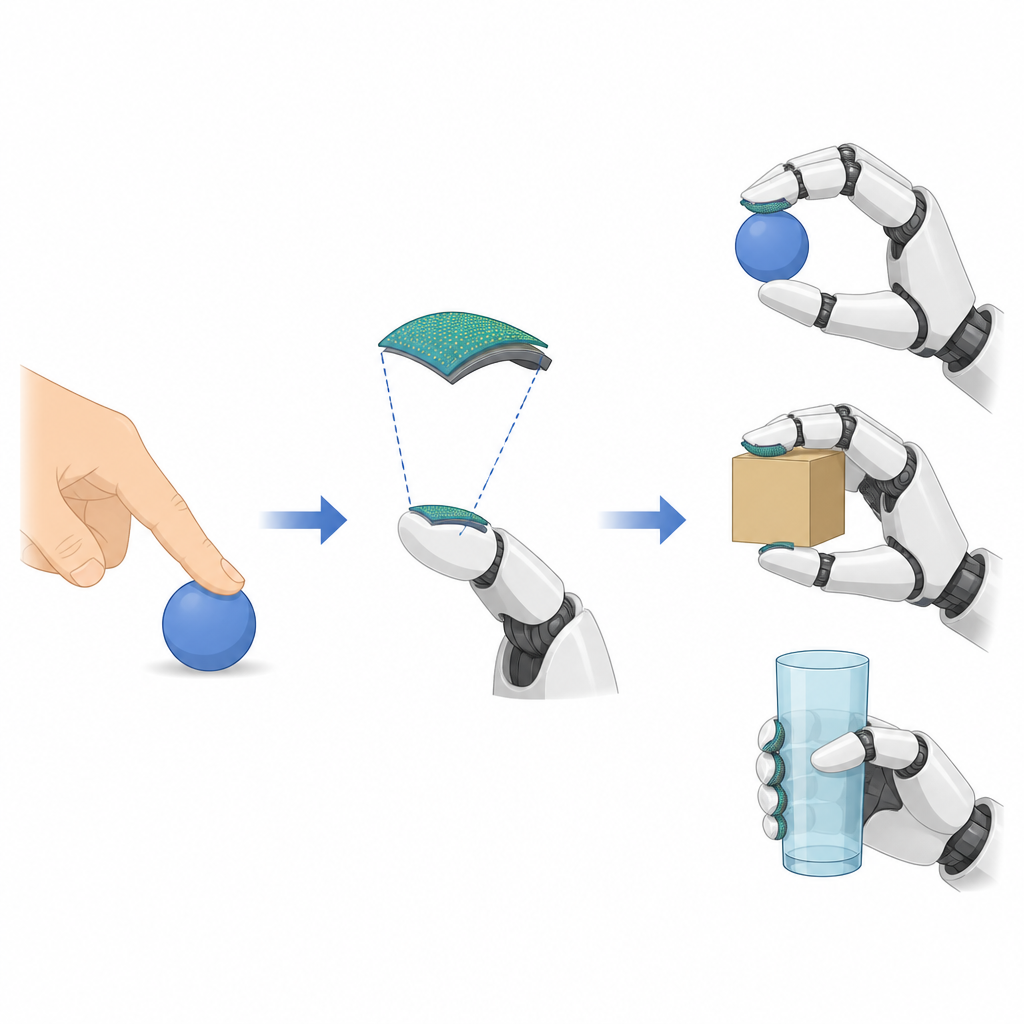
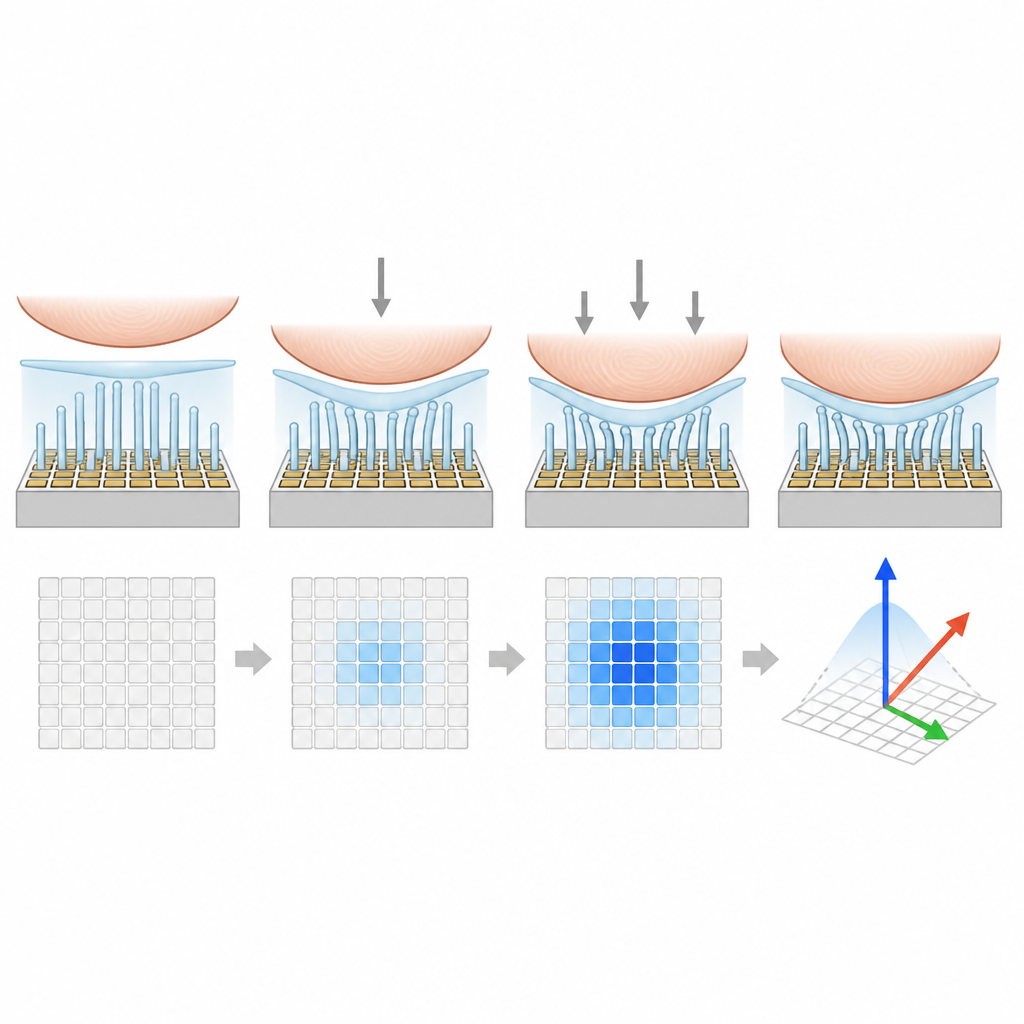
HexaTouch löst dieses Problem, indem es Ideen aus kamerabasierten und elektrischen Messungen in einem kompakten Fingertippblock von etwa 15 × 15 × 8 Millimetern kombiniert. Oben befindet sich eine weiche, gekrümmte Gummikuppe, die die Form eines menschlichen Fingers nachahmt und hilft, sich um Objekte zu legen. Versteckt in dieser Kuppe liegt ein sorgfältig gestalteter „Wald“ winziger Gummisäulen, deren Höhen über die Oberfläche variieren. Diese Säulen sind leitfähig gemacht, so dass sie bei Druck Kontakt zu einem dichten Raster von Kapazitätspads auf einem Mikrochip darunter herstellen. Statt ein Bild mit einer Kamera aufzunehmen, misst der Chip Änderungen der elektrischen Kapazität an jedem Pad und erzeugt so eine detaillierte Graustufenkarte davon, wie die Oberfläche gedrückt, geschert oder verdreht wird.
Das Lesen von Berührungsmustern erlernen
Die unterschiedlichen Höhen der Säulen sind kein rein kosmetisches Detail. Höhere Säulen berühren zuerst, kürzere setzen bei zunehmender Kraft hinzu, sodass die Reaktion über einen weiten Lastbereich verteilt wird und Muster für verschiedene Richtungen und Momente markanter werden. Computersimulationen und Experimente zeigen, dass diese abgestufte Struktur den Sensor empfindlicher für seitliches Schieben und Verdrehen macht als eine gleichförmige Säulenanordnung, während er zugleich höhere Kräfte handhabt, ohne zu sättigen. Das Team speist die Berührungsbilder dann in ein maschinelles Lernsystem ähnlich denen für die Bilderkennung. Ein tiefes neuronales Netzwerk lernt, jedes Muster in eine sechsteilige Kraft- und Momentablesung zu übersetzen — in drei Richtungen und drei Rotationen — zusammen mit einer dreidimensionalen Kontaktposition.
Vom sorgfältigen Greifen bis zum Drohnenflug
Mit dieser Dekodierung wird der Fingertipp zu einem schnellen, präzisen Tastinstrument. Tests zeigen, dass HexaTouch Kräfte mit Fehlern unter etwa anderthalb Prozent schätzt und die Kontakt-Tiefe mit einer Genauigkeit bis auf ein Zehntel Millimeter lokalisieren kann. Er arbeitet zuverlässig über einen Bereich von Temperaturen und Luftfeuchten hinweg und selbst nach Tagen wiederholter Belastung. An robotischen Fingern montiert ermöglicht der Sensor einer Hand, ihren Griff in einer Vor-Greif-Phase anzupassen, Kontaktpunkte zu verschieben, bis ein Objekt stabil gehalten wird statt zu verrutschen. Dieselbe Sensorik hilft einem Roboter, einen USB-Stecker trotz kleiner Fehlausrichtungen einzusetzen, indem er subtile Änderungen von Kräften und Momenten spürt und seine Bewegung korrigiert, bevor es klemmt.
Berührung als neue Steuersprache
Die Autoren zeigen außerdem, wie derselbe Fingertipp als einfaches, intuitives Bedienfeld für Maschinen dienen kann. Indem seine Oberfläche in Regionen aufgeteilt und Druckrichtung, Stärke und Drehung auf Befehle abgebildet werden, kann eine Person ein kleines Auto steuern, sich in einem Videospiel bewegen und schießen oder eine simulierte Drohne pilotieren. Stärkeres Drücken kann Geschwindigkeit oder Höhe ändern, während das Drehen des Fingertipps die Gier steuert. Kraftschwellen helfen, versehentliche Berührungen zu ignorieren, sodass die Steuerung glatt bleibt. In all diesen Fällen verwandelt HexaTouch nuancierten Fingertippdruck in klare Mehrachsenbefehle in Echtzeit.
Was das für die Alltagsrobotik bedeutet
Für einen Laien ist HexaTouch wie ein kleiner, aber bemerkenswert fähiger Fingertippsinnesnerv für Roboter. Durch die Kombination einer intelligenten internen Struktur, dichter elektrischer Messung und gelernter Mustenerkennung packt er reichhaltige, menschenähnliche Taktinformationen in ein winziges, robustes Modul. Die Arbeit weist einen Weg zu Roboterhänden und anderen Geräten, die mit weit größerer Feinheit fühlen, wo und wie sie die Welt berühren, und erleichtert damit Aufgaben wie sichere Zusammenarbeit, empfindliche Montage und natürliche, gestenbasierte Steuerung im Alltag.
Zitation: Song, Y., Wang, J., Li, Z. et al. Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions. Microsyst Nanoeng 12, 193 (2026). https://doi.org/10.1038/s41378-026-01292-3
Schlüsselwörter: robotische Berührung, taktiler Sensor, Mensch-Maschine-Interaktion, geschickte Manipulation, weiche Robotik