Clear Sky Science · it
Interfaccia tattile sei-assi alla scala del polpastrello con rilevamento di forza ad alta precisione e localizzazione della posizione per interazioni uomo-macchina abili
Perché il senso del polpastrello conta per i robot
Immaginate di dover allacciarvi le scarpe o inserire un cavo USB con dei pesanti guanti da sci. È così che la maggior parte dei robot percepisce il mondo oggi: possono muoversi con precisione, ma il loro senso del tatto è rozzo. Questo articolo presenta HexaTouch, un sensore tattile delle dimensioni del polpastrello che aiuta i robot a sentire più come noi, rilevando non solo quanto premono, ma anche esattamente dove e in quale direzione agiscono le forze. Questo progresso potrebbe rendere i robot più sicuri, più abili e più facili da comandare con gesti semplici.
Come i robot normalmente percepiscono il mondo
Molti sensori tattili robotici attuali scambiano un pregio per un altro. I sensori di forza rigidi sono accurati ma troppo duri e ingombranti per un contatto sicuro con le persone. I sensori più morbidi sono più sicuri e possono avvolgere gli oggetti, ma spesso rilevano solo la pressione perpendicolare, perdendo le forze laterali e le torsioni. I sensori tattili basati su telecamere possono creare ricche "immagini tattili" della gomma deformata, tuttavia tendono a essere più grandi di un polpastrello e si basano su ottiche delicate che faticano con carichi elevati. Il risultato è che pochi sistemi esistenti riescono ad essere contemporaneamente piccoli, robusti e capaci di individuare sia forze complesse sia posizioni di contatto con precisione.
Un piccolo polpastrello che vede il tatto senza una fotocamera
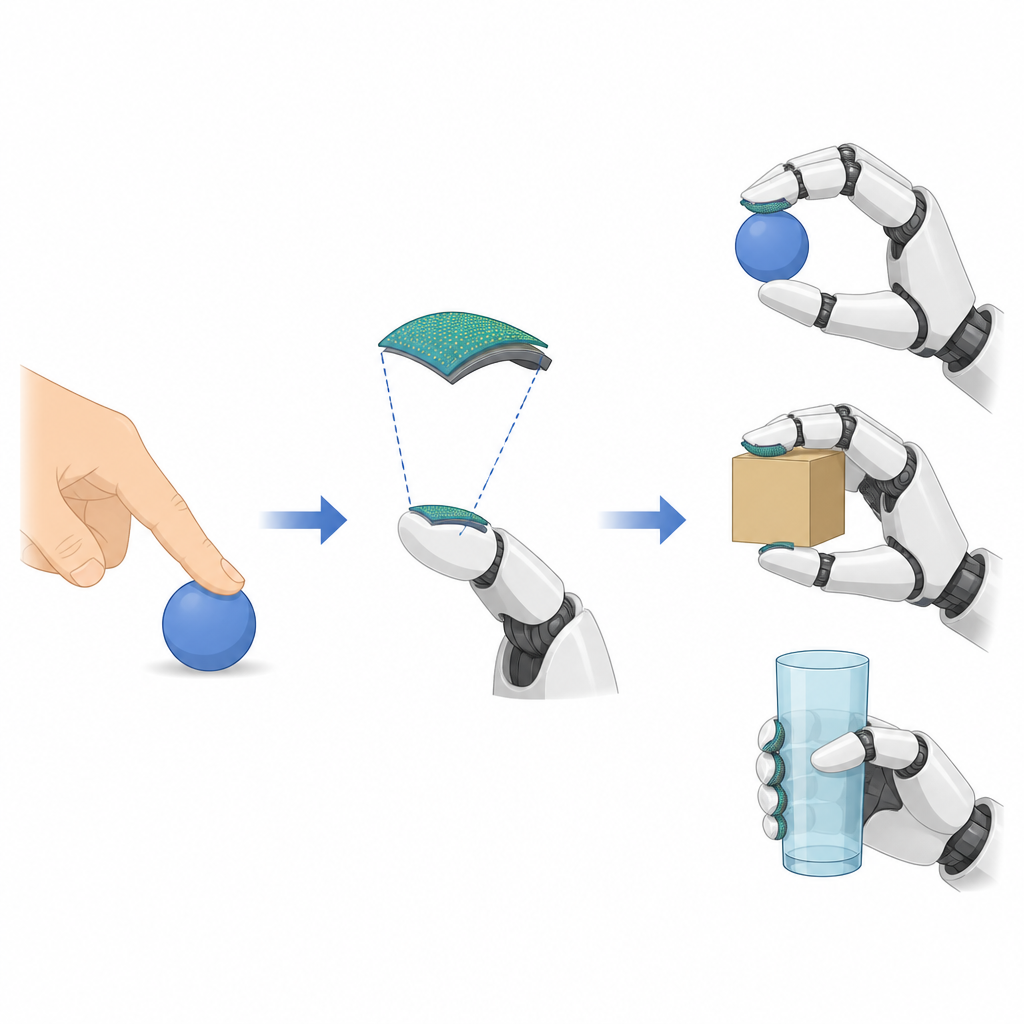
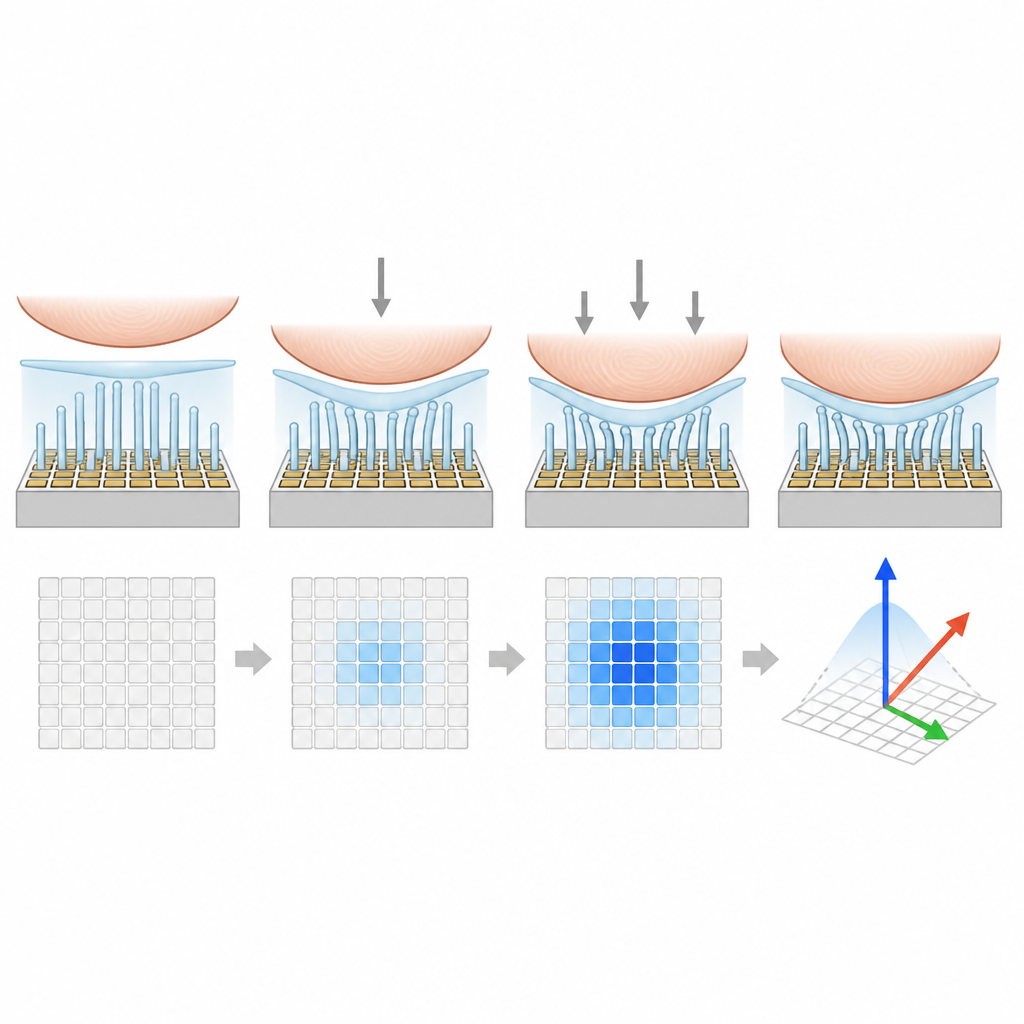
HexaTouch affronta questo problema fondendo idee provenienti da sensori basati su camera e da rilevamento elettrico in un blocco compatto di circa 15 per 15 per 8 millimetri. In cima c’è una punta morbida e curva in gomma che imita la forma del dito umano, aiutando ad avvolgere gli oggetti. Nascosto all’interno di questa punta c’è una foresta progettata di minuscoli pilastri di gomma la cui altezza varia sulla superficie. Questi pilastri sono resi conduttivi così che, quando vengono premuti, toccano una densa griglia di pad capacitivi su un microchip sottostante. Invece di scattare una foto con una telecamera, il chip misura le variazioni di capacità elettrica su ciascun pad, formando una dettagliata mappa in scala di grigi di come la superficie viene premuta, strisciata o torcendosi.
Imparare a leggere i pattern del tatto
Le altezze variabili dei pilastri non sono un dettaglio estetico. I pilastri più alti toccano per primi e quelli più corti entrano in contatto man mano che la forza aumenta, distribuendo la risposta su un ampio intervallo di carichi e rendendo i pattern più distintivi per diverse direzioni e coppie torcenti. Simulazioni al computer ed esperimenti mostrano che questa struttura graduata rende il sensore più sensibile alla spinta laterale e alla torsione rispetto a un array di pilastri uniforme, pur gestendo forze maggiori senza saturare. Il team poi inserisce le immagini tattili in un sistema di apprendimento automatico simile a quelli usati per il riconoscimento delle immagini. Una rete neurale profonda impara a tradurre ogni pattern in una lettura a sei componenti di forze e coppie, lungo tre direzioni e tre rotazioni, insieme a una posizione di contatto tridimensionale.
Dalla presa attenta al volo di droni
Con questa decodifica in atto, il polpastrello diventa uno strumento tattile rapido e preciso. I test mostrano che HexaTouch stima le forze con errori inferiori a circa un punto e mezzo percentuale e può localizzare la profondità del contatto con precisione fino a un decimo di millimetro. Continua a funzionare in modo affidabile su un intervallo di temperature e umidità e dopo giorni di carichi ripetuti. Montato sulle dita robotiche, il sensore permette a una mano di regolare la presa durante una fase di pre-presa, spostando i punti di contatto finché un oggetto non viene tenuto stabilmente anziché scivolare. Lo stesso rilevamento aiuta un robot a inserire una spina USB nonostante piccoli disallineamenti, percependo sottili variazioni di forza e coppia e correggendo il suo movimento prima che si blocchi.
Il tatto come nuovo linguaggio di controllo
Gli autori mostrano anche come lo stesso polpastrello possa agire come un pad di controllo semplice e intuitivo per le macchine. Suddividendo la sua superficie in regioni e mappando direzione della spinta, intensità e torsione in comandi, una persona può guidare una piccola auto robotica, muovere e sparare in un videogioco o pilotare un drone simulato. Premere più forte può cambiare velocità o altezza, mentre ruotare il polpastrello può controllare lo yaw. Soglie di forza aiutano a ignorare tocchi accidentali in modo che il controllo resti fluido. In tutti questi casi, HexaTouch trasforma la pressione sfumata del polpastrello in comandi multi-asse chiari e in tempo reale.
Cosa significa per la robotica di tutti i giorni
Per un osservatore non esperto, HexaTouch è come dare ai robot una piccola ma sorprendentemente capace estremità nervosa del polpastrello. Combinando una struttura interna intelligente, un rilevamento elettrico denso e il riconoscimento dei pattern appreso, incapsula informazioni tattili ricche e simili a quelle umane in un modulo minuto e robusto. Il lavoro suggerisce un percorso verso mani robotiche e altri dispositivi in grado di percepire dove e come toccano il mondo con maggiore sottigliezza, rendendo più realizzabili in contesti quotidiani compiti come la collaborazione sicura, l’assemblaggio delicato e il controllo naturale basato sui gesti.
Citazione: Song, Y., Wang, J., Li, Z. et al. Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions. Microsyst Nanoeng 12, 193 (2026). https://doi.org/10.1038/s41378-026-01292-3
Parole chiave: tatto robotico, sensore tattile, interazione uomo-macchina, manipolazione abile, robotica morbida