Clear Sky Science · es
Interfaz táctil de seis ejes a escala de la yema del dedo con detección de fuerza de alta precisión y localización de posición para interacciones hábiles humano–máquina
Por qué el tacto en la yema importa para los robots
Imagínese intentar atarse los cordones o enchufar un cable USB llevando puestas manoplas gruesas. Así es como la mayoría de los robots perciben el mundo hoy: pueden moverse con precisión, pero su sentido del tacto es burdo. Este artículo presenta HexaTouch, un sensor táctil del tamaño de una yema que ayuda a los robots a sentir más como nosotros, detectando no solo cuánta fuerza aplican, sino también exactamente dónde y en qué dirección actúan las fuerzas. Este avance podría hacer a los robots más seguros, más diestros y más fáciles de controlar por personas mediante gestos sencillos.
Cómo suelen sentir el mundo los robots
Muchos sensores táctiles robóticos actuales intercambian una virtud por otra. Los sensores de fuerza rígidos son precisos pero demasiado duros y voluminosos para un contacto seguro con personas. Los sensores más blandos son más seguros y pueden ajustarse alrededor de objetos, pero a menudo solo detectan presión perpendicular, sin captar fuerzas laterales ni torsiones. Los sensores táctiles basados en cámaras pueden crear ricas "imágenes de tacto" de goma deformada, pero tienden a ser más grandes que una yema y dependen de ópticas delicadas que tienen problemas con cargas elevadas. El resultado es que pocos sistemas existentes pueden ser pequeños, robustos y capaces de localizar fuerzas complejas y posiciones de contacto al mismo tiempo.
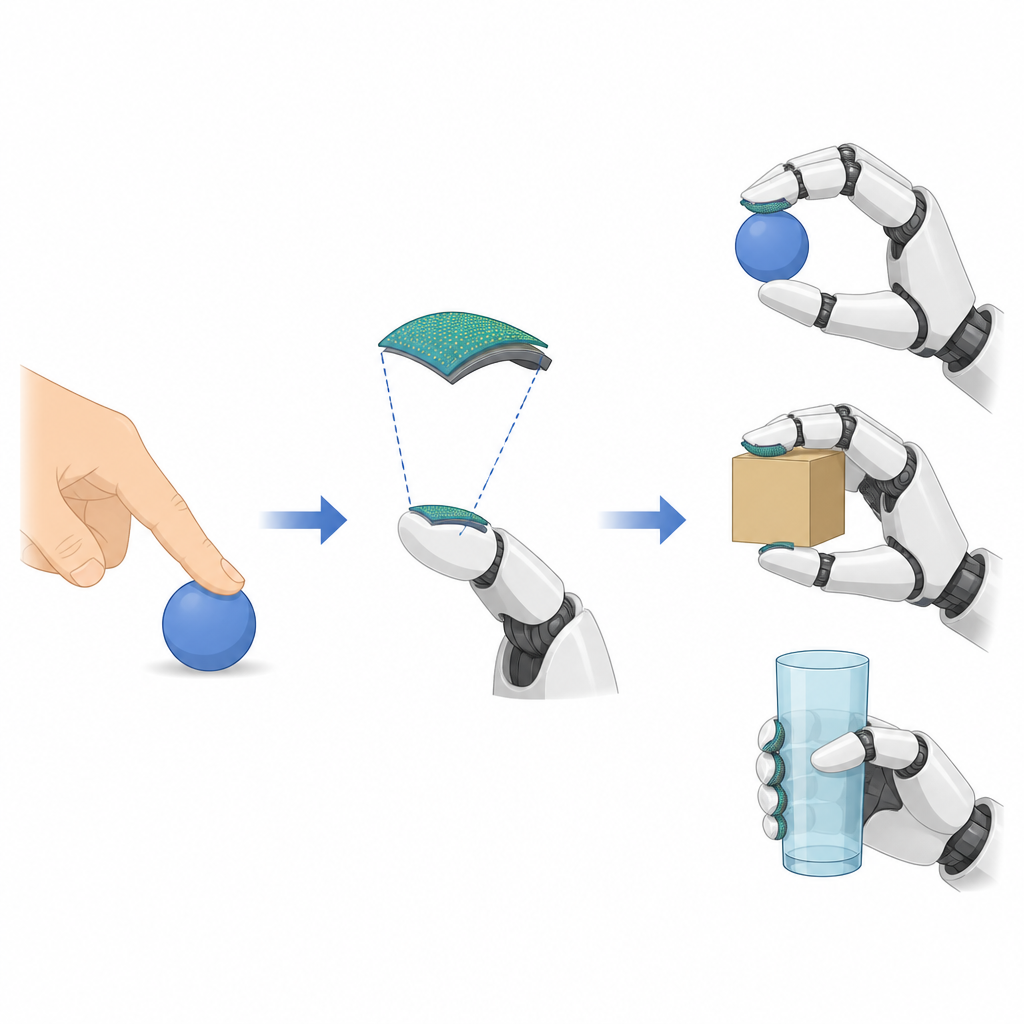
Una diminuta yema que ve el tacto sin cámara
HexaTouch aborda este problema combinando ideas de sensores basados en cámara y de detección eléctrica en un bloque compacto de punta de unos 15 por 15 por 8 milímetros. En la parte superior hay una punta de goma blanda y curva que imita la forma del dedo humano, ayudando a rodear los objetos. Oculto dentro de esa punta hay un bosque cuidadosamente diseñado de diminutos pilares de goma cuyas alturas varían a lo largo de la superficie. Estos pilares son conductores de modo que, al presionar, contactan una densa rejilla de almohadillas capacitivas en un microchip situado debajo. En lugar de tomar una foto con una cámara, el chip mide cambios en la capacitancia eléctrica en cada almohadilla, formando un mapa en escala de grises detallado de cómo se está presionando, deslizando o torciendo la superficie.
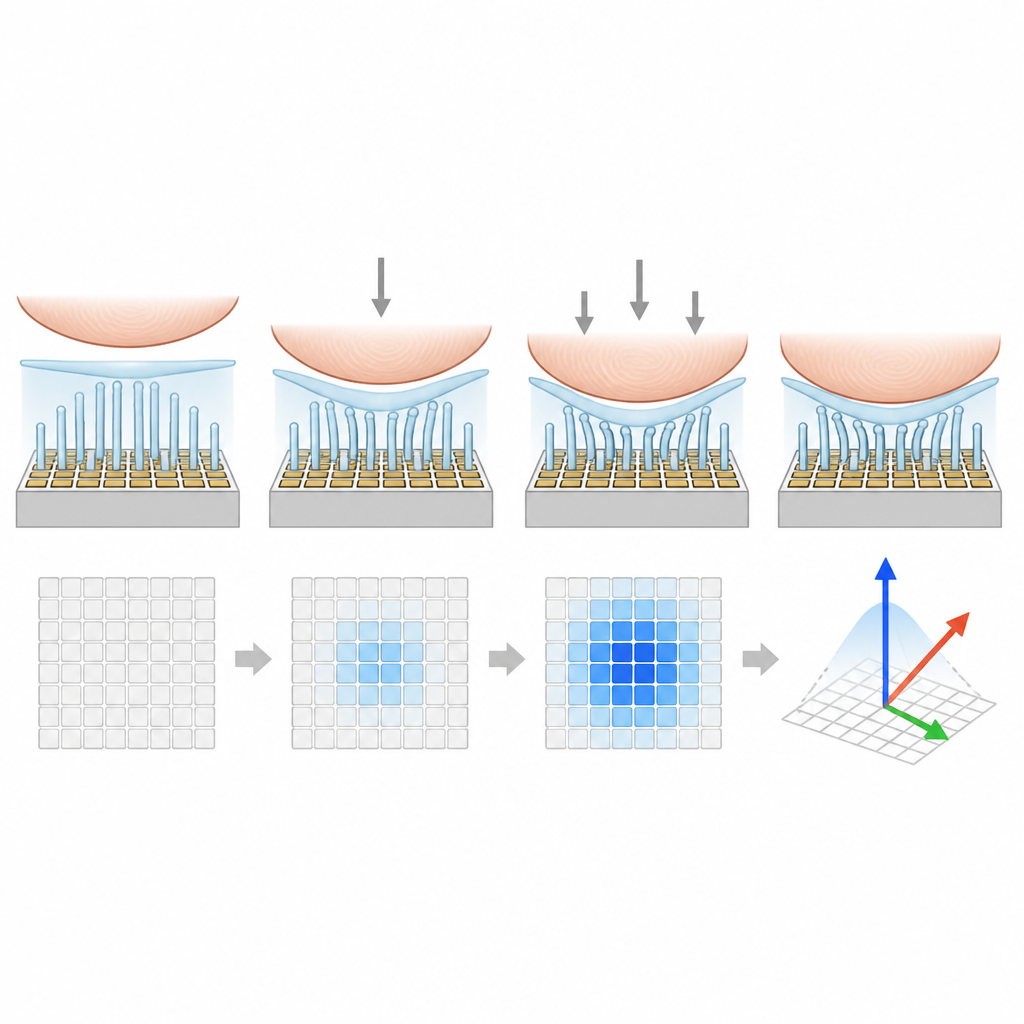
Aprender a leer patrones de tacto
La variación de alturas de los pilares no es un detalle cosmético. Los pilares más altos contactan primero y los más cortos entran en contacto a medida que aumenta la fuerza, extendiendo la respuesta sobre un amplio rango de cargas y haciendo los patrones más distintivos para diferentes direcciones y torques. Simulaciones por computadora y experimentos muestran que esta estructura graduada hace al sensor más sensible al empuje lateral y a la torsión que una matriz de pilares uniforme, mientras que aún maneja fuerzas más altas sin saturarse. El equipo luego alimenta las imágenes de tacto a un sistema de aprendizaje automático similar a los usados para reconocimiento de imágenes. Una red neuronal profunda aprende a traducir cada patrón en una lectura de seis componentes de fuerza y torque, a lo largo de tres direcciones y tres rotaciones, junto con una posición de contacto tridimensional.
Desde agarres cuidadosos hasta el vuelo de drones
Con esta decodificación en funcionamiento, la yema se convierte en un instrumento táctil rápido y preciso. Las pruebas muestran que HexaTouch estima fuerzas con errores por debajo de aproximadamente uno coma cinco por ciento y puede localizar la profundidad de contacto con exactitud hasta una décima de milímetro. Mantiene un funcionamiento fiable a través de un rango de temperaturas y humedad y después de días de cargas repetidas. Montado en dedos robóticos, el sensor permite que una mano ajuste su agarre durante una fase previa al agarre, desplazando los puntos de contacto hasta que un objeto se sujeta de forma estable en lugar de deslizarse. La misma detección ayuda a un robot a insertar un conector USB a pesar de pequeñas desalineaciones, sintiendo cambios sutiles en fuerza y torque y corrigiendo su movimiento antes de que se atasque.
El tacto como un nuevo lenguaje de control
Los autores también muestran cómo la misma yema puede actuar como un panel de control simple e intuitivo para máquinas. Dividiendo su superficie en regiones y mapeando la dirección del empuje, la fuerza y la torsión a comandos, una persona puede dirigir un pequeño robot coche, moverse y disparar en un videojuego o pilotar un dron simulado. Presionar con más fuerza puede cambiar la velocidad o la altura, mientras que girar la yema puede controlar el guiñada. Umbrales de fuerza ayudan a ignorar toques accidentales para que el control se mantenga fluido. En todos estos casos, HexaTouch convierte la presión matizada de la yema en comandos claros y multieje en tiempo real.
Qué significa esto para la robótica cotidiana
Para un observador no experto, HexaTouch es como dotar a los robots de una pequeña pero notablemente capaz terminación nerviosa en la yema. Al combinar una estructura interna inteligente, detección eléctrica densa y reconocimiento de patrones aprendido, empaqueta información táctil rica y similar a la humana en un módulo diminuto y resistente. El trabajo sugiere un camino hacia manos robóticas y otros dispositivos que puedan sentir dónde y cómo tocan el mundo con mucha mayor sutileza, haciendo tareas como la colaboración segura, el ensamblaje delicado y el control natural por gestos más alcanzables en entornos cotidianos.
Cita: Song, Y., Wang, J., Li, Z. et al. Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions. Microsyst Nanoeng 12, 193 (2026). https://doi.org/10.1038/s41378-026-01292-3
Palabras clave: tacto robótico, sensor táctil, interacción humano-máquina, manipulación diestro, robótica blanda