Clear Sky Science · ru
Шестиаосевой тактильный интерфейс размером с кончик пальца с высокоточным измерением силы и локализацией положения для ловких взаимодействий человек–машина
Почему осязание кончиком пальца важно для роботов
Представьте, что вам нужно завязать шнурки или подключить USB‑кабель в толстых рукавицах. Вот как большинство роботов воспринимают мир сегодня: они умеют двигаться точно, но их осязание грубое. В этой статье представлен HexaTouch — сенсор размером с кончик пальца, который помогает роботам ощущать мир ближе к человеческому: он фиксирует не только силу нажатия, но и точное положение и направление приложенных сил. Это достижение может сделать роботов безопаснее, более ловкими и проще управляемыми с помощью простых жестов.
Как роботы обычно «чувствуют» мир
Многие современные тактильные сенсоры роботов жертвуют одним преимуществом ради другого. Жесткие силовые датчики точны, но слишком тверды и громоздки для безопасного контакта с людьми. Мягкие сенсоры безопаснее и могут обхватывать объекты, но часто регистрируют только силу в направлении нормали, пропуская боковые силы и крутящие моменты. Камерные тактильные сенсоры создают богатые «изображения прикосновения» деформируемой резины, однако обычно они больше размера кончика пальца и зависят от хрупкой оптики, которая плохо справляется с большими нагрузками. В результате немногие существующие системы одновременно малы, надежны и способны точно определять сложные силы и позиции контакта.
Крошечный кончик пальца, который «видит» прикосновение без камеры
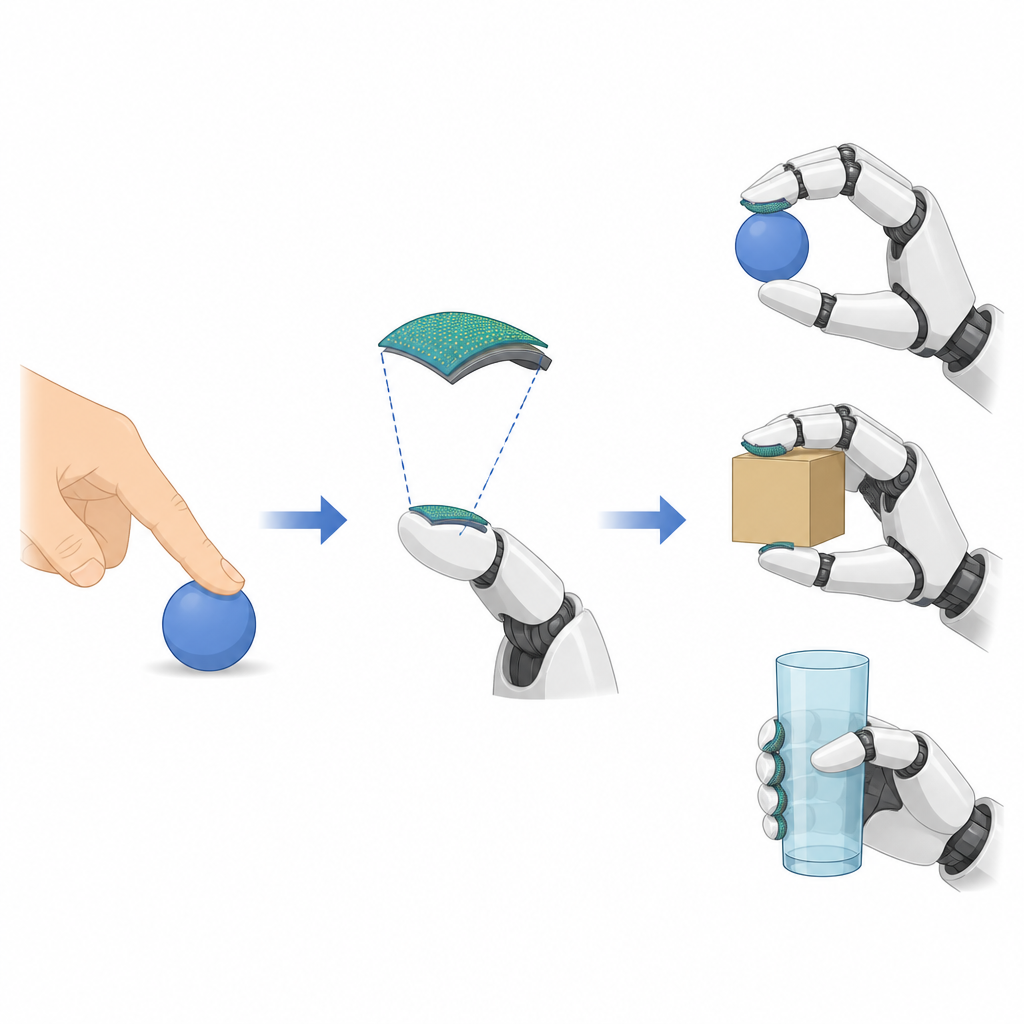
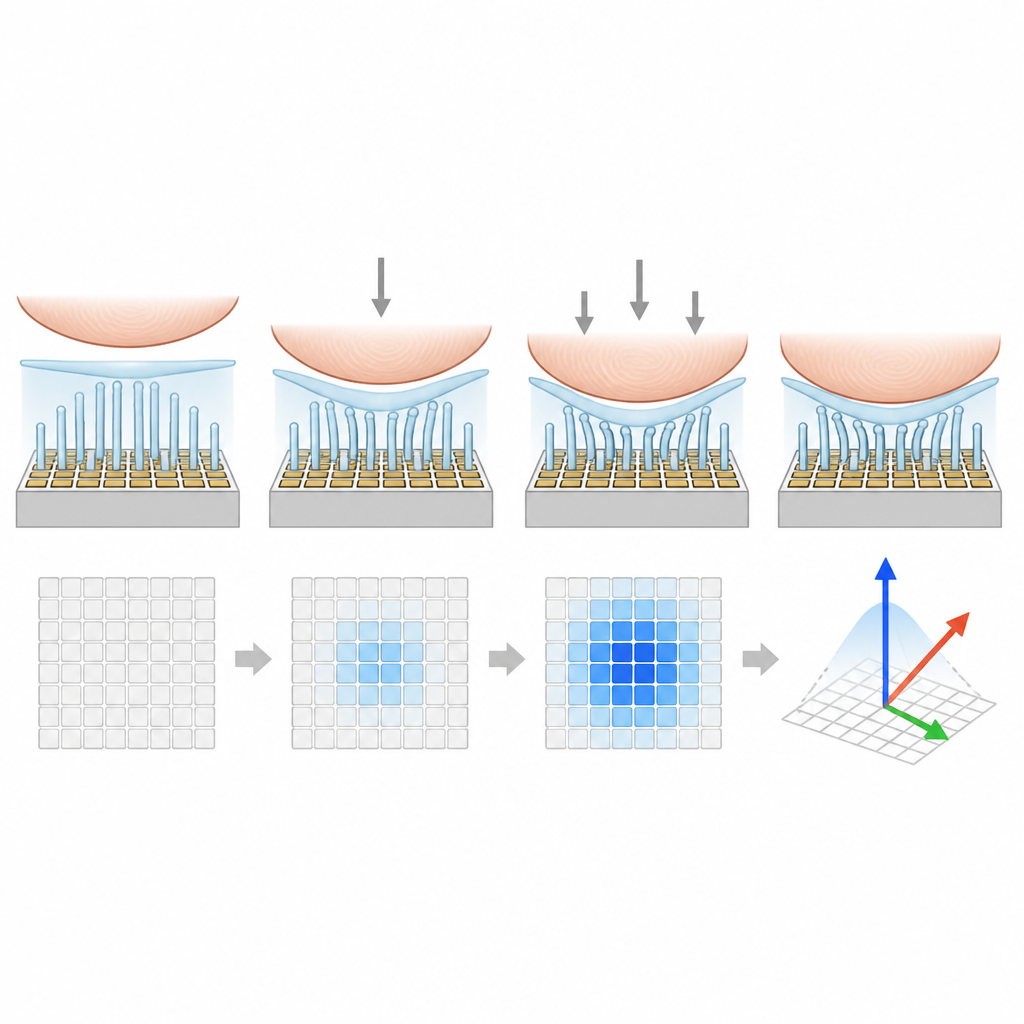
HexaTouch решает эту задачу, объединяя идеи камерных и электрических методов в компактном блоке размером примерно 15 × 15 × 8 мм. Сверху находится мягкий изогнутый резиновый наконечник, имитирующий форму человеческого пальца и облегчающий обхват объектов. Внутри этого наконечника спрятан тщательно спроектированный «лес» из крошечных резиновых столбиков с переменной высотой по поверхности. Эти столбики сделаны проводящими, так что при нажатии они замыкают плотную сетку емкостных площадок на микрочипе внизу. Вместо съемки камерой чип измеряет изменения электрической емкости на каждой площадке, формируя детальную градационную карту того, как поверхность прижимается, сдвигается или закручивается.
Обучение чтению паттернов прикосновения
Переменная высота столбиков — не декоративная деталь. Более высокие столбики касаются первыми, а более короткие подключаются по мере увеличения силы, распределяя отклик на широкий диапазон нагрузок и делая паттерны более различимыми для разных направлений и моментов. Компьютерное моделирование и эксперименты показывают, что такая градуированная структура делает сенсор более чувствительным к боковому давлению и кручению по сравнению с однородным массивом столбиков, при этом выдерживая большие усилия без насыщения. Команда затем подаёт эти «изображения прикосновения» в систему машинного обучения, аналогичную тем, что используются для распознавания образов. Глубокая нейронная сеть учится переводить каждый паттерн в шестикомпонентное считывание сил и моментов — по трём линейным направлениям и трём вращениям — а также в трёхмерную позицию контакта.
От аккуратного захвата до полёта дрона
С такой декодировкой кончик пальца становится быстрым и точным инструментом осязания. Тесты показывают, что HexaTouch оценивает силы с ошибками ниже примерно полутора процентов и может определять глубину контакта с точностью до десятых долей миллиметра. Он стабильно работает при разных температурах и влажности и после многодневных повторных нагрузок. Установленный на роботизированных пальцах, сенсор позволяет кисти корректировать захват на предварительной фазе, смещая точки контакта до тех пор, пока объект не будет удерживаться устойчиво, а не соскользнёт. То же сенсорное восприятие помогает роботу вставить USB‑штекер при небольших рассогласованиях: он чувствует тонкие изменения силы и момента и корректирует движение прежде, чем произойдёт заклинивание.
Прикосновение как новый язык управления
Авторы также показывают, как тот же кончик пальца может служить простым интуитивным пультом управления машинами. Разделив поверхность на зоны и сопоставив направление нажатия, силу и кручение с командами, человек может управлять маленькой автомобильной платформой, передвигаться и стрелять в видеоигре или пилотировать симулированный дрон. Более сильное нажатие меняет скорость или высоту, а поворот кончика контролирует рыскание. Пороговые значения силы помогают игнорировать случайные прикосновения, сохраняя плавность управления. Во всех этих сценариях HexaTouch превращает нюансированные давления кончика пальца в ясные многослойные команды в реальном времени.
Что это значит для повседневной робототехники
Для неспециалиста HexaTouch похож на то, как если бы роботу добавили маленький, но удивительно способный нервный окончание в кончике пальца. Сочетая умную внутреннюю структуру, плотное электрическое считывание и обученное распознавание паттернов, он упаковывает богатую, человекоподобную информацию о прикосновении в маленький, прочный модуль. Работа указывает путь к роботизированным рукам и другим устройствам, которые смогут с гораздо большей тонкостью ощущать место и характер контакта с миром, делая такие задачи, как безопасное сотрудничество, деликатная сборка и естественное управление жестами, более достижимыми в повседневных условиях.
Цитирование: Song, Y., Wang, J., Li, Z. et al. Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions. Microsyst Nanoeng 12, 193 (2026). https://doi.org/10.1038/s41378-026-01292-3
Ключевые слова: роботическое прикосновение, тактильный датчик, взаимодействие человек–машина, ловкая манипуляция, мягкая робототехника