Clear Sky Science · sv
Sex-axlig taktil gränssnitt i fingertoppsskala med högprecisionskraftmätning och positionslokalisering för skicklig människa–maskin-interaktion
Varför fingertoppskänsel är viktigt för robotar
Föreställ dig att försöka knyta skorna eller sätta i en USB-kabel medan du bär tjocka tumvantar. Så upplever de flesta robotar världen i dag: de kan röra sig precist, men deras känsel är grov. Denna artikel introducerar HexaTouch, en beröringssensor i fingertoppsstorlek som hjälper robotar att känna mer som vi gör, genom att inte bara uppfatta hur hårt de trycker utan också exakt var och i vilken riktning krafter verkar. Denna förbättring kan göra robotar säkrare, mer skickliga och enklare för människor att styra med enkla gester.
Hur robotar vanligtvis känner världen
Många nuvarande robotiska beröringssensorer kompromissar mellan olika styrkor. Rigida kraftsensorer är precisa men för hårda och klumpiga för säker kontakt med människor. Mjukare sensorer är säkrare och kan svepa runt föremål, men de registrerar ofta bara tryck rakt in och missar sidokrafter och vridmoment. Kamerabaserade taktila sensorer kan skapa rika "beröringsbilder" av deformerad gummi, men de tenderar att vara större än en fingertopp och förlita sig på känslig optik som har svårt med tunga belastningar. Resultatet är att få befintliga system kan vara små, robusta och samtidigt kunna exakt lokalisera komplexa krafter och kontaktpositioner.
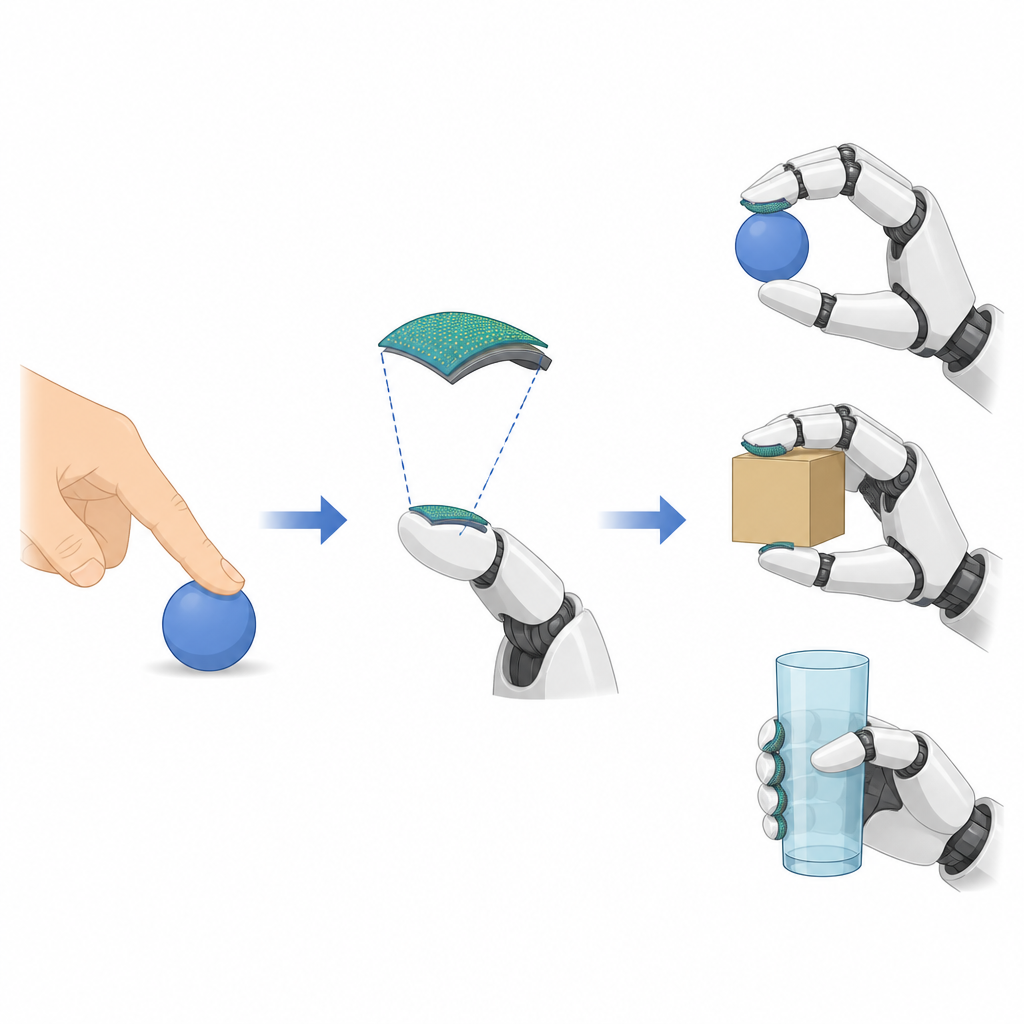
En liten fingertopp som ser beröring utan kamera
HexaTouch angriper detta problem genom att blanda idéer från kamerabaserad och elektrisk mätteknik i ett kompakt fingertoppsblock på ungefär 15 × 15 × 8 millimeter. Ovanpå finns en mjuk, krökt gummitopp som efterliknar formen av ett mänskligt finger och hjälper den att omsluta föremål. Dolt inuti denna topp finns en noggrant utformad skog av små gummipelare vars höjd varierar över ytan. Dessa pelare är ledande så att de, när de trycks ihop, kommer i kontakt med ett tätt rutnät av kapacitivplattor på en mikrochip under dem. Istället för att ta en bild med en kamera mäter chipet förändringar i elektrisk kapacitans vid varje platta och bildar en detaljerad gråskalekarta över hur ytan trycks, skjuvas eller vrids.
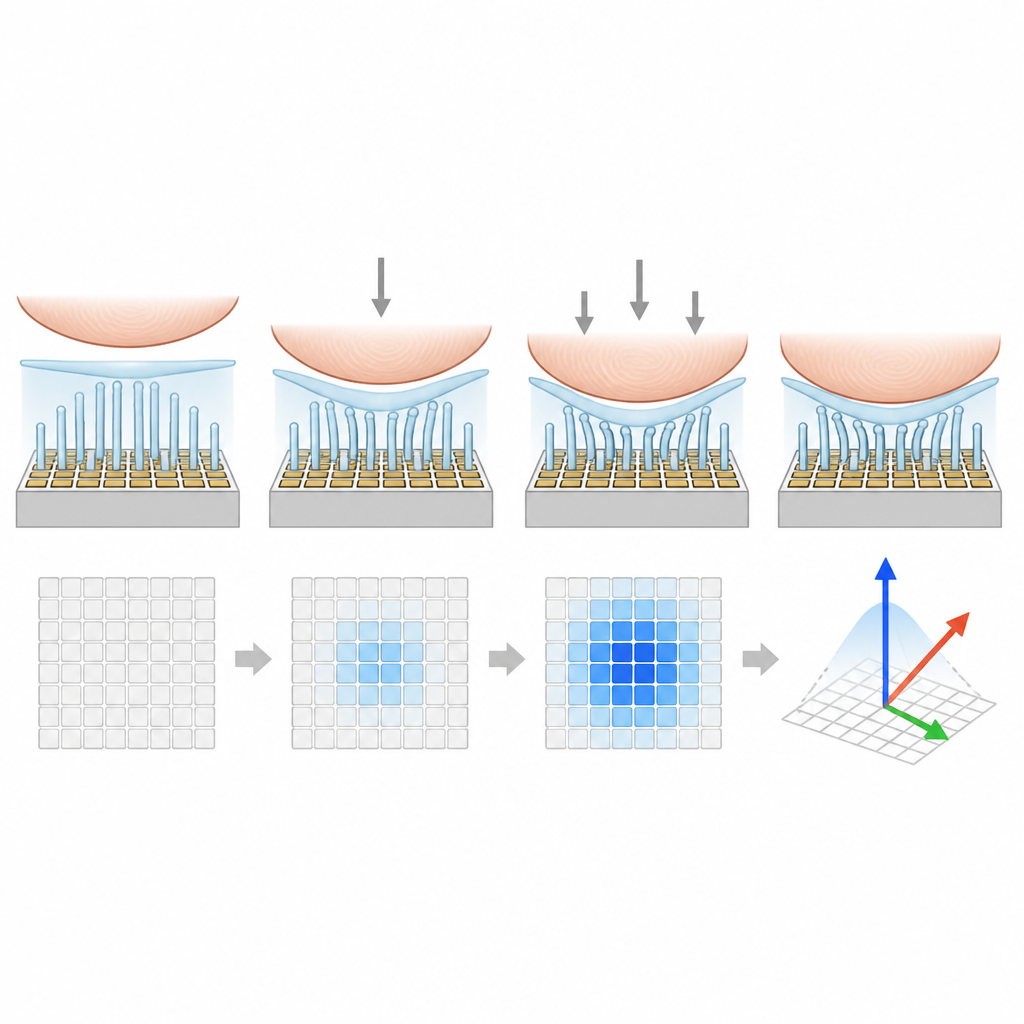
Lära sig läsa beröringsmönster
Pilarernas varierande höjd är inte en kosmetisk detalj. Högre pelare tar kontakt först och kortare engagerar när kraften ökar, vilket sprider responsen över ett brett belastningsområde och gör mönstren mer distinkta för olika riktningar och vridmoment. Datorsimuleringar och experiment visar att denna graderade struktur gör sensorn mer känslig för sidotryck och vridning än en enhetlig pelaruppställning, samtidigt som den fortfarande hanterar högre krafter utan att mätta. Teamet matar sedan beröringsbilderna till ett maskininlärningssystem liknande de som används för bildigenkänning. Ett djupt neuralt nätverk lär sig att översätta varje mönster till en sexdelad kraft- och vridmätningsavläsning — längs tre translationsriktningar och tre rotationsaxlar — tillsammans med en tredimensionell kontaktposition.
Från varsamt greppande till drönarflygning
Med denna avkodning blir fingertoppen ett snabbt, precist beröringsinstrument. Tester visar att HexaTouch uppskattar krafter med fel under cirka ett och ett halvt procent och kan placera kontaktdjup med en noggrannhet ner till en tiondels millimeter. Den fungerar pålitligt över ett spektrum av temperaturer och luftfuktighet och efter dagars upprepad belastning. När den är monterad på robotfingrar låter sensorn en hand justera sitt grepp under en förgripfas, förflytta kontaktpunkter tills ett föremål hålls stadigt istället för att glida. Samma sensoringrepp hjälper en robot att föra in en USB-kontakt trots små felinriktningar genom att känna av subtila förändringar i kraft och vridmoment och korrigera sin rörelse innan det kärvar.
Beröring som ett nytt styrspråk
Författarna visar också hur samma fingertopp kan fungera som en enkel, intuitiv styrplatta för maskiner. Genom att dela ytan i regioner och koppla tryckriktning, styrka och vridning till kommandon kan en person styra en liten bilrobot, röra sig och avfyra i ett videospel eller manövrera en simulerad drönare. Hårdare tryck kan ändra hastighet eller höjd, medan vridningar av fingertoppen kan kontrollera yaw. Krafttrösklar hjälper till att ignorera oavsiktliga beröringar så att styrningen förblir smidig. I alla dessa fall omvandlar HexaTouch nyanserat fingertoppstryck till tydliga, multi-axliga kommandon i realtid.
Vad detta betyder för vardagsrobotik
För en lekmannauppfattning är HexaTouch som att ge robotar en liten men anmärkningsvärt kapabel fingertoppsnerv. Genom att kombinera en smart intern struktur, tät elektrisk mätning och inlärd mönsterigenkänning paketerar den rik, människoliknande beröringsinformation i en liten, robust modul. Arbetet pekar mot en väg för robotiska händer och andra enheter som kan känna var och hur de rör vid världen med mycket större finkänslighet, vilket gör uppgifter som säker samverkan, känslig montering och naturlig geststyrning mer möjliga i vardagliga miljöer.
Citering: Song, Y., Wang, J., Li, Z. et al. Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions. Microsyst Nanoeng 12, 193 (2026). https://doi.org/10.1038/s41378-026-01292-3
Nyckelord: robotisk beröring, taktil sensor, människa-maskin-interaktion, skicklig manipulering, mjukrobotik