Clear Sky Science · fr
Interface tactile six axes à l’échelle de la pulpe du doigt avec détection de force haute précision et localisation de position pour des interactions homme–machine habiles
Pourquoi le sens du toucher à la pulpe compte pour les robots
Imaginez essayer de lacer vos chaussures ou d’insérer un câble USB en portant des moufles épaisses. C’est ainsi que la plupart des robots perçoivent le monde aujourd’hui : ils bougent avec précision, mais leur sens du toucher est grossier. Cet article présente HexaTouch, un capteur tactile de la taille d’une pulpe de doigt qui aide les robots à ressentir plus comme nous, en détectant non seulement la force d’appui, mais aussi l’endroit exact et la direction auxquelles les forces s’appliquent. Cette avancée pourrait rendre les robots plus sûrs, plus habiles et plus faciles à contrôler par des gestes simples.
Comment les robots perçoivent généralement le monde
Beaucoup de capteurs tactiles robotiques actuels sacrifient une qualité pour une autre. Les capteurs de force rigides sont précis mais trop durs et encombrants pour un contact sûr avec des personnes. Les capteurs plus souples sont plus sûrs et peuvent épouser les objets, mais ils ne mesurent souvent que la pression normale, manquant les forces latérales et les torsions. Les capteurs tactiles à base de caméra peuvent produire des « images de toucher » riches de la déformation du caoutchouc, mais ils sont généralement plus grands qu’une pulpe et reposent sur une optique délicate qui souffre sous de fortes charges. Le résultat est que peu de systèmes existants sont à la fois petits, robustes et capables de localiser précisément des forces complexes et des points de contact.
Une minuscule pulpe qui « voit » le toucher sans caméra
HexaTouch aborde ce problème en mêlant des idées des capteurs à caméra et des capteurs électriques dans un bloc de pulpe compact d’environ 15 × 15 × 8 millimètres. Au sommet se trouve une pointe en caoutchouc souple et courbée qui imite la forme d’un doigt humain, ce qui aide à envelopper les objets. Cachée à l’intérieur de cette pointe se trouve une forêt soigneusement conçue de minuscules piliers en caoutchouc dont la hauteur varie à travers la surface. Ces piliers sont rendus conducteurs de sorte que, lorsqu’ils sont pressés, ils touchent une grille dense de pastilles capacitives sur une puce située en dessous. Plutôt que de prendre une image avec une caméra, la puce mesure les variations de capacité électrique sur chaque pastille, formant une carte en niveaux de gris détaillée de la façon dont la surface est pressée, cisaillée ou tordue.
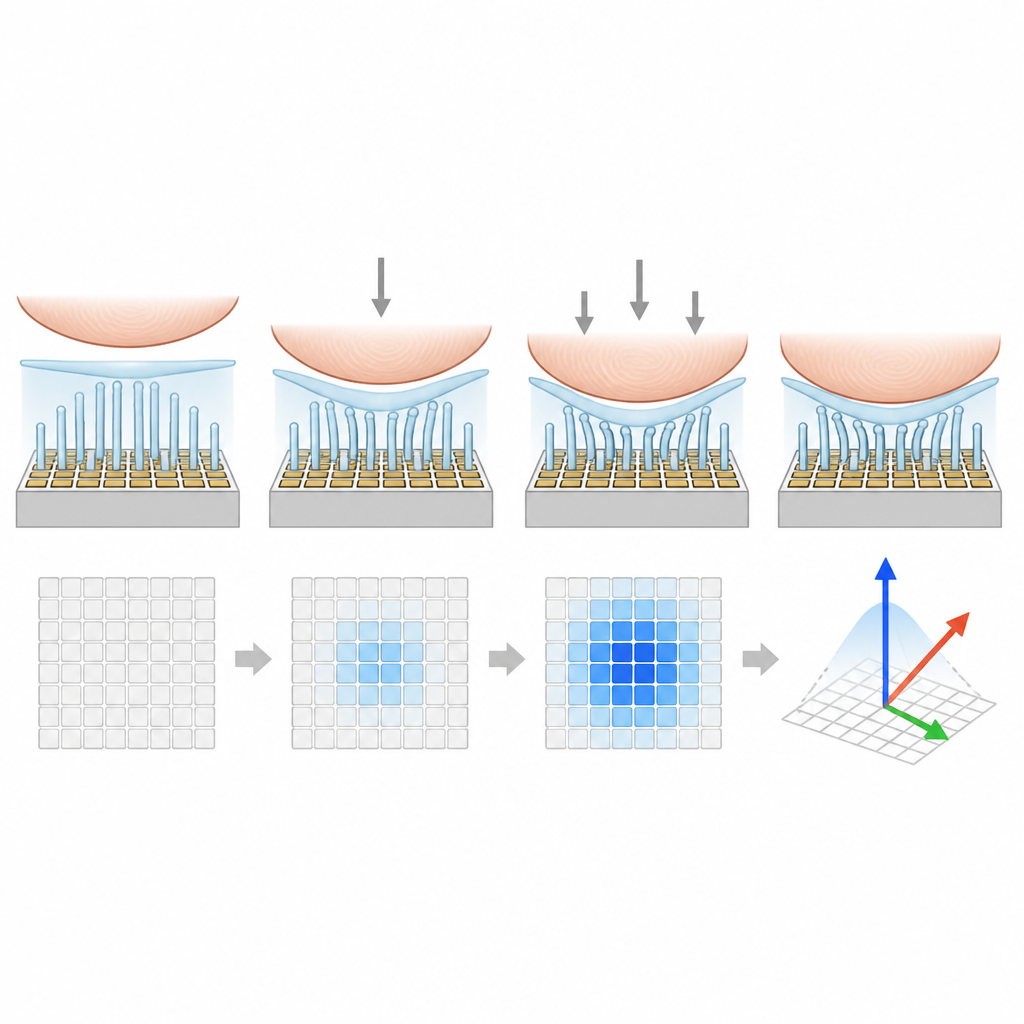
Apprendre à lire les motifs du toucher
La variation de hauteur des piliers n’est pas un détail cosmétique. Les piliers plus hauts touchent en premier et les plus courts s’engagent au fur et à mesure que la force augmente, étalant la réponse sur une large plage de charges et rendant les motifs plus distinctifs selon les directions et les couples. Simulations et expériences montrent que cette structure graduée rend le capteur plus sensible aux poussées latérales et aux torsions qu’un réseau de piliers uniforme, tout en supportant des forces plus élevées sans saturation. L’équipe alimente ensuite ces images tactiles dans un système d’apprentissage automatique similaire à ceux utilisés pour la reconnaissance d’images. Un réseau neuronal profond apprend à traduire chaque motif en une lecture en six composantes de forces et moments — trois directions et trois rotations — ainsi qu’en une position de contact tridimensionnelle.
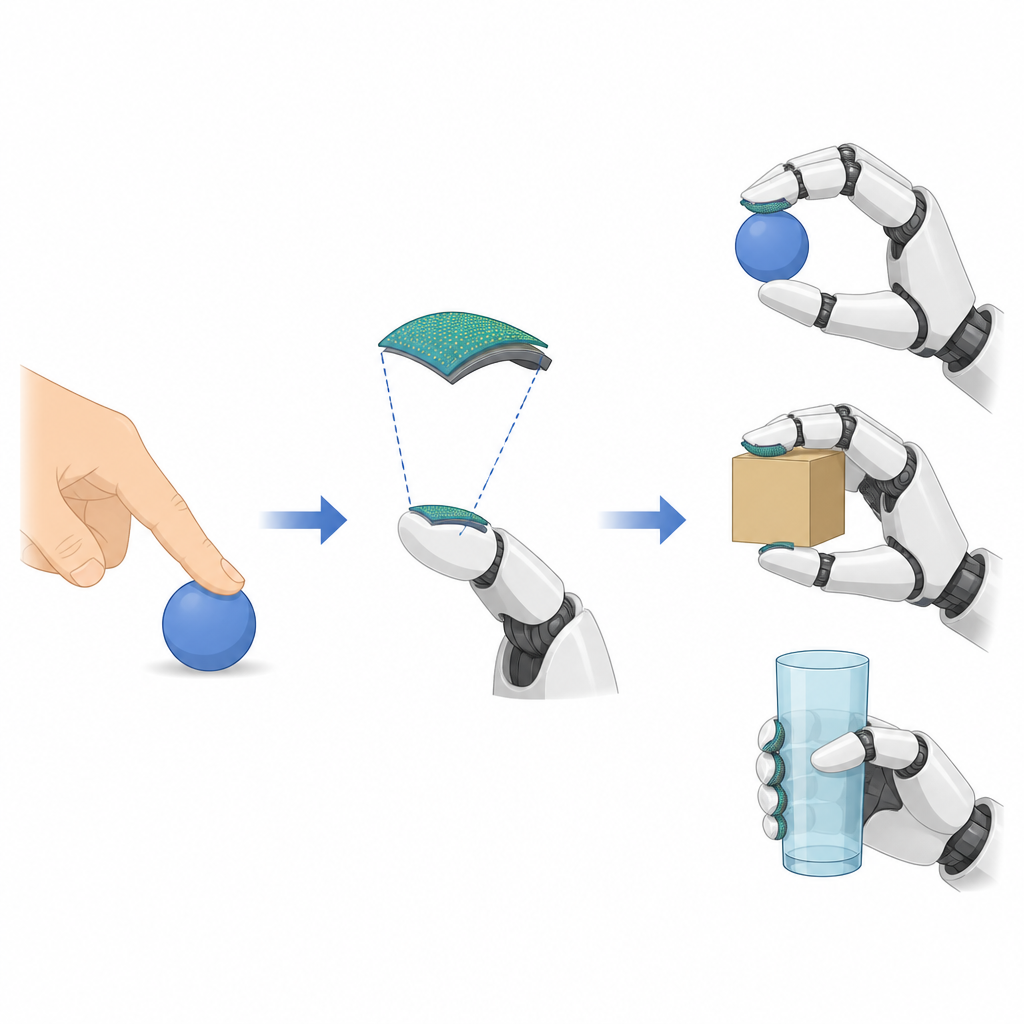
De la préhension soignée au pilotage de drone
Avec ce décodage, la pulpe devient un instrument de toucher rapide et précis. Les tests montrent que HexaTouch estime les forces avec des erreurs inférieures à environ un pourcent et demi et peut localiser la profondeur de contact avec une précision atteignant un dixième de millimètre. Il fonctionne de façon fiable sur une plage de températures et d’humidités et après des jours de sollicitations répétées. Monté sur des doigts robotiques, le capteur permet à une main d’ajuster sa préhension pendant la phase de pré-saisie, déplaçant les points de contact jusqu’à ce que l’objet soit tenu de façon stable plutôt que de glisser. Le même capteur aide un robot à insérer une prise USB malgré de petites désalignements, en ressentant de subtiles variations de force et de couple et en corrigeant son mouvement avant un coincement.
Le toucher comme nouveau langage de commande
Les auteurs montrent aussi comment la même pulpe peut servir de pavé de commande simple et intuitif pour des machines. En divisant sa surface en régions et en cartographiant la direction, la force et la torsion en commandes, une personne peut diriger une petite voiture robot, se déplacer et tirer dans un jeu vidéo, ou piloter un drone simulé. Appuyer plus fort peut changer la vitesse ou l’altitude, tandis que pivoter la pulpe peut contrôler le lacet. Des seuils de force aident à ignorer les contacts accidentels pour que le contrôle reste fluide. Dans tous ces cas, HexaTouch transforme une pression subtile de la pulpe en commandes multi‑axes claires et en temps réel.
Ce que cela signifie pour la robotique quotidienne
Pour un observateur non spécialiste, HexaTouch revient à doter les robots d’une petite mais remarquablement capable extrémité nerveuse à la pulpe. En combinant une structure interne intelligente, une détection électrique dense et une reconnaissance de motifs apprise, il condense des informations tactiles riches et proches de la sensibilité humaine dans un module minuscule et robuste. Ce travail ouvre la voie à des mains robotiques et d’autres dispositifs capables de sentir où et comment ils touchent le monde avec bien plus de subtilité, rendant des tâches comme la collaboration sûre, l’assemblage délicat et le contrôle naturel par gestes plus accessibles dans des contextes quotidiens.
Citation: Song, Y., Wang, J., Li, Z. et al. Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions. Microsyst Nanoeng 12, 193 (2026). https://doi.org/10.1038/s41378-026-01292-3
Mots-clés: tactilité robotique, capteur tactile, interaction homme‑machine, manipulation habile, robotique souple