Clear Sky Science · ja
高精度力検出と位置局在化を備えた指先スケールの六軸触覚インターフェース:巧緻な人機相互作用のために
なぜ指先の触覚がロボットに重要なのか
厚いミトンをはめたまま靴ひもを結んだりUSBケーブルを差し込もうとすることを想像してみてください。これが今日の多くのロボットの世界の感じ方です:動作は精密でも、触覚は粗雑です。本論文はHexaTouchを紹介します。これは指先サイズの触覚センサーで、ロボットが押す強さだけでなく、力がどこでどの方向に働いているかも感知できるようにします。この進歩により、ロボットはより安全で巧緻になり、単純なジェスチャーで人が操作しやすくなる可能性があります。
ロボットは通常どのように触覚を得ているか
現在の多くの触覚センサーは長所を得るために別の長所を犠牲にしています。剛性の高い力センサーは精度は高いものの、人と接触するには硬すぎてかさばります。より柔らかいセンサーは安全で物に沿って巻きつくことができますが、多くは押し込み方向の圧力のみを感知し、横方向の力やねじりを見逃します。カメラベースの触覚センサーは変形したゴム表面の詳細な「触覚画像」を作れますが、指先より大きくなりがちで、光学系が繊細なため大きな荷重に弱い傾向があります。その結果、小さく、頑丈で、同時に複雑な力と接触位置を特定できるシステムはほとんどありません。
カメラを使わずに触覚を見取る小さな指先
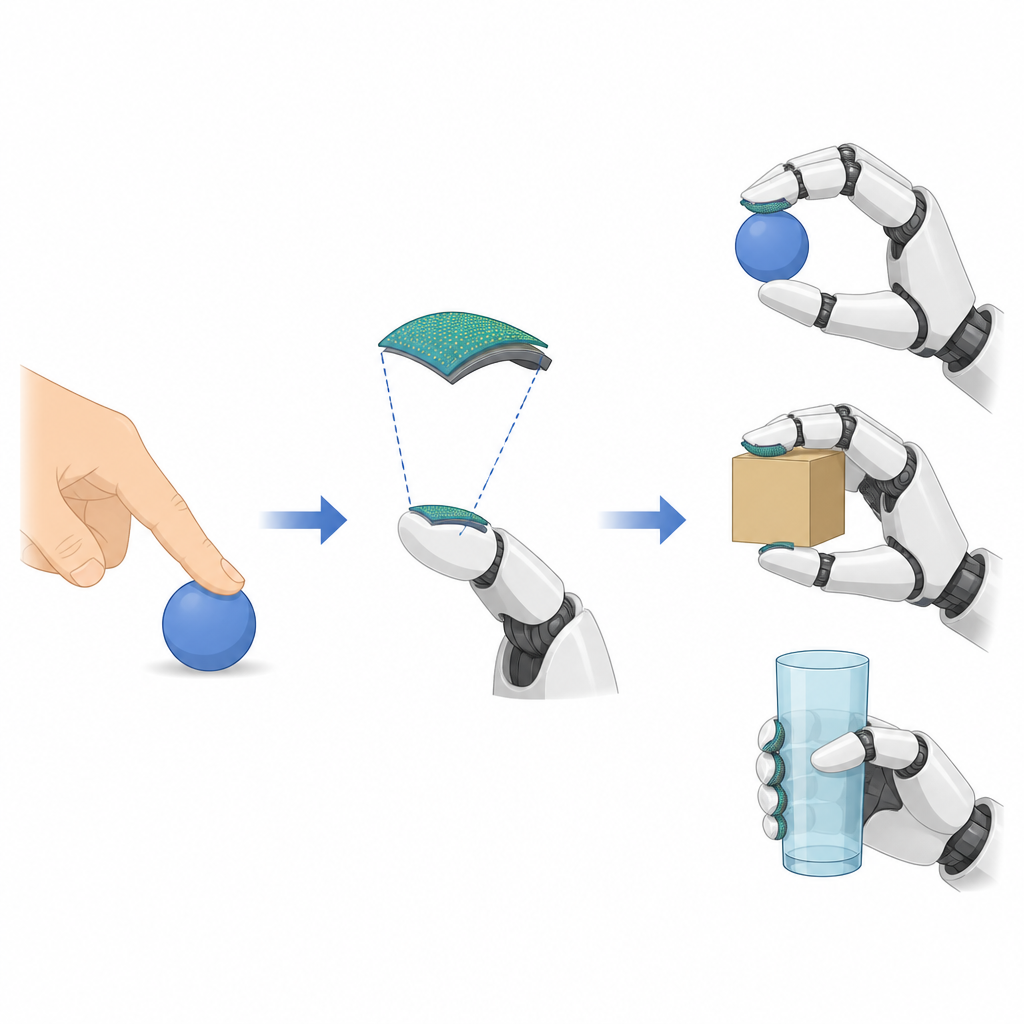
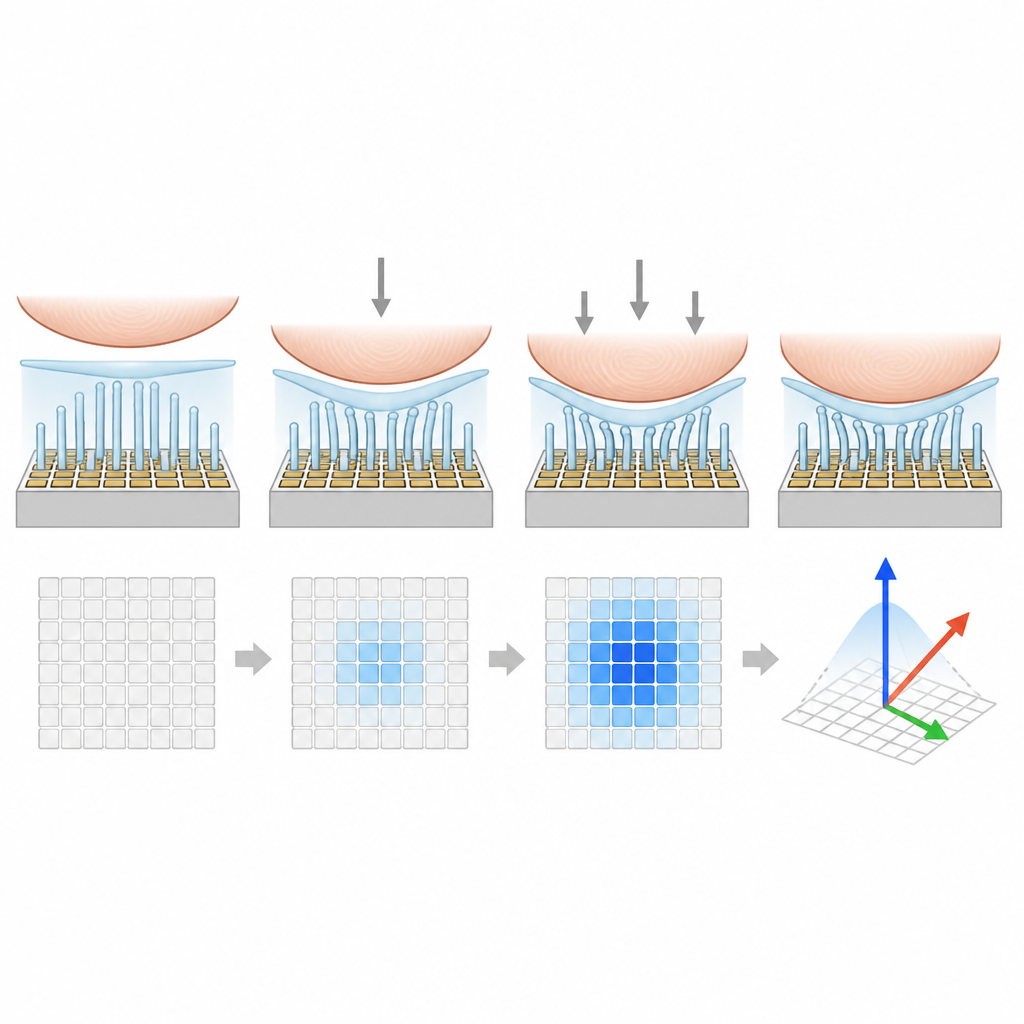
HexaTouchは、カメラベースと電気的センシングのアイデアを融合し、約15×15×8ミリメートルのコンパクトな指先ブロックでこの問題に対処します。上部には人間の指の形状を模した柔らかく曲面のラバーチップがあり、物体に沿って包み込むのを助けます。このチップ内部には表面全体で高さが変化する慎重に設計された小さなラバーピラーの林が隠れています。これらのピラーは導電性にされており、押されると下のマイクロチップ上の密な静電容量パッドのグリッドに接触します。カメラで画像を撮る代わりに、チップは各パッドでの電気容量の変化を測定し、表面が押され、せん断され、ねじられている様子の詳細なグレースケールマップを形成します。
触覚パターンを読み取る学習
ピラーの高さが変化していることは単なる見た目の違いではありません。背の高いピラーは先に接触し、力が増すにつれて短いピラーが次第に関与するため、応答が広い荷重域に広がり、方向やトルクごとにパターンがより識別しやすくなります。計算シミュレーションと実験は、この段階的な構造が均一なピラー配列よりも横方向の押しやねじりに対して感度を高めつつ、高い力にも飽和せず耐えられることを示しています。チームは次にこれらの触覚画像を画像認識に用いられるものに似た機械学習システムに入力します。深層ニューラルネットワークは各パターンを三方向の力と三軸のトルクの六要素読取、および三次元の接触位置に翻訳することを学習します。
注意深い把持からドローンの飛行まで
このデコーディングが整うと、指先は高速で高精度な触覚計測器になります。テストではHexaTouchが力を約1.5パーセント未満の誤差で推定し、接触深さを0.1ミリメートルの精度で特定できることが示されました。温度や湿度の幅広い条件下や繰り返し荷重の後でも安定して動作します。ロボット指に取り付けると、センサーはプレ把持段階で把持を調整し、物体が滑らず安定して保持されるまで接触点を移動させることができます。同じセンシングは、わずかなずれがあってもUSBプラグを押し込む際に力とトルクの微妙な変化を感知して動作を修正し、詰まりを防ぐのにも役立ちます。
触覚を新しい制御言語にする
著者らは同じ指先が機械にとって単純で直感的なコントロールパッドとしても機能し得ることを示しています。表面を領域に分割し、押す方向、強さ、ねじりをコマンドに対応させることで、人は小型の車ロボットを操縦したり、ビデオゲームで移動や射撃を行ったり、シミュレートされたドローンを操縦したりできます。強く押すと速度や高度が変わり、指先の回転でヨーを制御できます。力の閾値は偶発的な触れを無視するのに役立ち、制御を滑らかに保ちます。いずれの場合も、HexaTouchは繊細な指先圧をリアルタイムで明確な多軸コマンドに変換します。
日常のロボティクスにとっての意義
一般の観察者には、HexaTouchはロボットに小さくて驚くほど有能な指先の神経終末を与えるように見えます。スマートな内部構造、密な電気的センシング、学習されたパターン認識を組み合わせることで、豊かで人間に似た触覚情報を小さく頑丈なモジュールに詰め込んでいます。本研究は、どこでどのように世界に触れているかをより繊細に感じ取れるロボットハンドやその他の機器への道を示し、協働の安全性、精密組立、自然なジェスチャーによる制御といった日常的な課題の実現可能性を高めます。
引用: Song, Y., Wang, J., Li, Z. et al. Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions. Microsyst Nanoeng 12, 193 (2026). https://doi.org/10.1038/s41378-026-01292-3
キーワード: ロボットの触覚, 触覚センサー, 人機相互作用, 巧緻操作, ソフトロボティクス