Clear Sky Science · ar
واجهة لمسية بمقاس طرف الإصبع بستة محاور مع استشعار قوة عالي الدقة وتحديد موضع للمناورات البشرية الآلية البارعة
لماذا يهم شعور طرف الإصبع للروبوتات
تخيل أنك تحاول ربط حذائك أو إدخال كابل USB بينما ترتدي قفازات سميكة. هكذا تختبر معظم الروبوتات العالم اليوم: يمكنها التحرك بدقة، لكن حاسة اللمس لديها خشنة. يقدم هذا البحث HexaTouch، مستشعرًا لمسيًا بحجم طرف الإصبع يساعد الروبوتات على الإحساس بطريقة أقرب إلينا، لا يكتشف مقدار الضغط فحسب، بل يحدد أيضًا بالضبط مكان القوة واتجاهها. قد يجعل هذا التقدم الروبوتات أكثر أمانًا وأكثر براعة وأسهل للتحكم بواسطة حركات بسيطة.
كيف تشعر الروبوتات العالم عادةً
تضحي العديد من حساسات اللمس الروبوتية الحالية بقوة من أجل أخرى. المستشعرات الصلبة للقوة دقيقة لكنها قاسية وضخمة جدًا للتماس الآمن مع الأشخاص. المستشعرات الأكثر ليونة أكثر أمانًا ويمكنها الالتفاف حول الأشياء، لكنها غالبًا ما تستشعر الضغط العمودي فقط، فتفقد القوى الجانبية والالتواءات. يمكن لمستشعرات اللمس المعتمدة على الكاميرا إنشاء "صور لمسية" غنية للمطاط المشوه، لكنها تميل إلى أن تكون أكبر من طرف الإصبع وتعتمد على بصريات حساسة تتعثر تحت أحمال ثقيلة. النتيجة أن القليل من الأنظمة الموجودة قادرة على أن تكون صغيرة ومتينة وقادرة في الوقت نفسه على تحديد قوى معقدة ومواقع التلامس بدقة.
طرف إصبع صغير يرى اللمس دون كاميرا
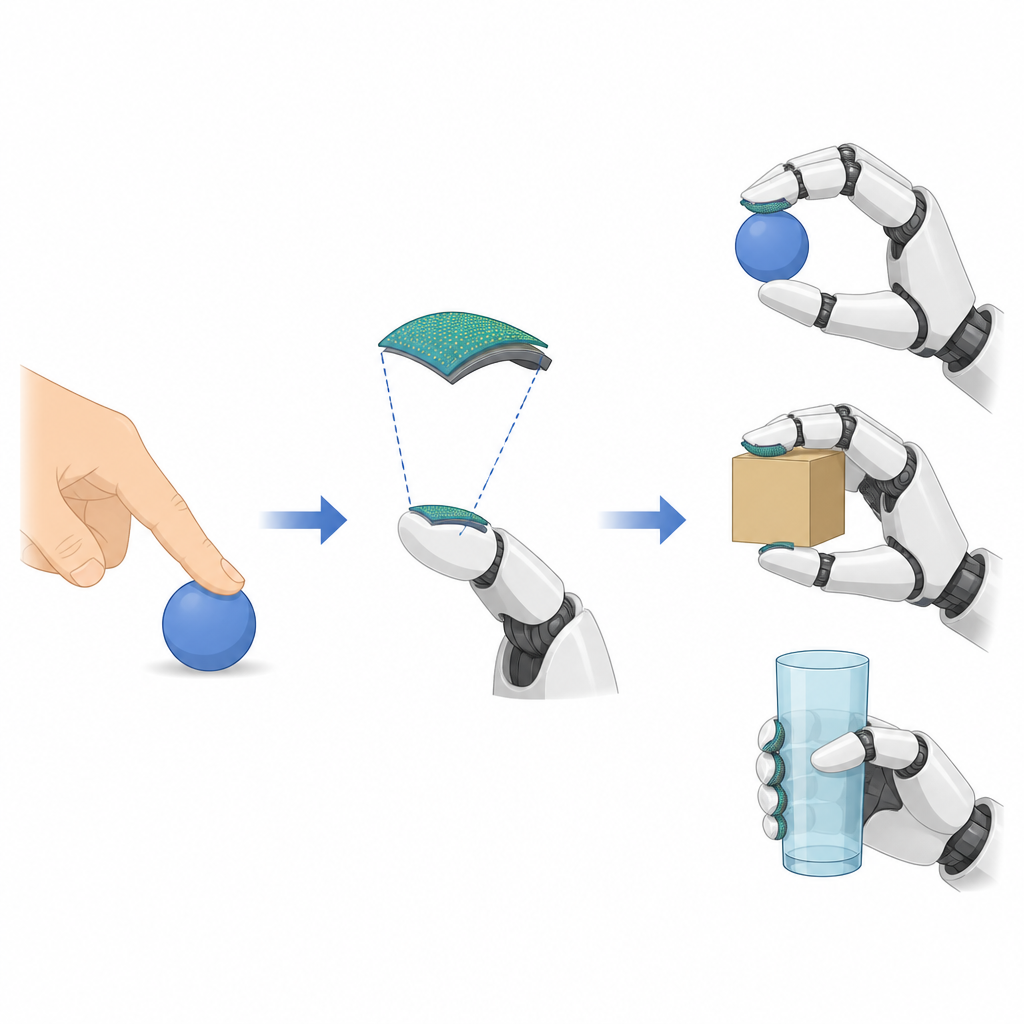
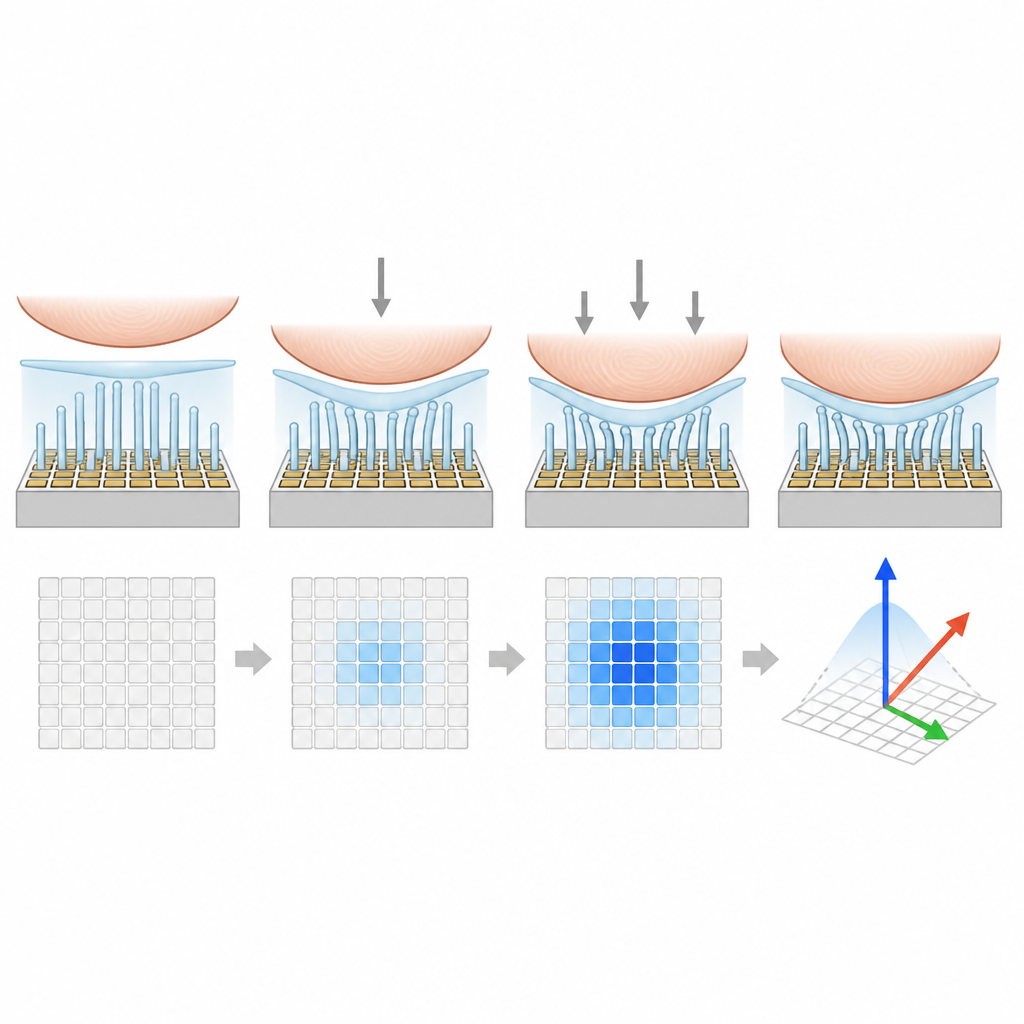
يتعامل HexaTouch مع هذه المشكلة بدمج أفكار من الاستشعار بالكاميرا والكهربائي في كتلة طرف إصبع مدمجة بحجم نحو 15 في 15 في 8 مليمترات. في الأعلى توجد طرفية مطاطية ناعمة ومنحنية تحاكي شكل الإصبع البشري، مما يساعدها على الالتفاف حول الأشياء. مخفية داخل هذه الطرفية غابة مصممة بعناية من أعمدة مطاطية صغيرة تختلف ارتفاعاتها عبر السطح. تُصنع هذه الأعمدة بحيث تكون موصلة كهربائيًا فعندما تُضغط تلامس شبكة كثيفة من وسادات المكثف على شريحة دقيقة أسفلها. بدلًا من التقاط صورة بكاميرا، تقيس الشريحة تغييرات السعة الكهربائية عند كل وسادة، مكوّنة خريطة تدرج رمادي مفصّلة لكيفية تعرض السطح للضغط أو القص أو الالتواء.
تعلم قراءة أنماط اللمس
ارتفاعات الأعمدة المتباينة ليست تفصيلًا تجميليًا. الأعمدة الأطول تلامس أولًا وتدخل الأعمدة الأقصر حيز التلامس مع زيادة القوة، مما يوزع الاستجابة عبر نطاق واسع من الأحمال ويجعل الأنماط أكثر تميزًا لاتجاهات وعزوم مختلفة. تظهر المحاكاة الحاسوبية والتجارب أن هذا الهيكل المتدرج يجعل المستشعر أكثر حساسية للدفع الجانبي والالتواء مقارنة بمصفوفة أعمدة متساوية الطول، مع قدرة على التعامل مع قوى أعلى دون التشبع. ثم تُدخل صور اللمس هذه إلى نظام تعلم آلي مشابه لتلك المستخدمة في تعرف الصور. يتعلم شبكة عصبية عميقة ترجمة كل نمط إلى قراءة مكوّنة من ستة أجزاء للقوة والعزم عبر ثلاثة محاور وأيضًا موقع تلامس ثلاثي الأبعاد.
من القبض الحذر إلى طيران الطائرات المسيرة
مع هذا فك الشيفرة، يصبح طرف الإصبع أداة لمسية سريعة ودقيقة. تُظهر الاختبارات أن HexaTouch يقدّر القوى بأخطاء تقل عن حوالي واحد ونصف بالمئة ويمكنه تحديد عمق التلامس بدقة تصل إلى عُشر المليمتر. يستمر عمله بشكل موثوق عبر نطاقات درجات حرارة ورطوبة مختلفة وبعد أيام من التحميل المتكرر. عندما يُركّب على أصابع روبوتية، يسمح المستشعر لليد بتعديل قبضتها خلال مرحلة ما قبل القبض، مبدلة نقاط التلامس حتى يُحبَس الجسم بثبات بدلًا من الانزلاق. يساعد نفس الاستشعار الروبوت في إدخال قابس USB رغم انحرافات صغيرة في المحاذاة، من خلال الإحساس بتغيرات دقيقة في القوة والعزم وتصحيح حركته قبل أن يعلق.
اللمس كلغة تحكم جديدة
يُظهر المؤلفون أيضًا كيف يمكن أن يعمل نفس طرف الإصبع كلوحة تحكم بسيطة وبديهية للآلات. بتقسيم سطحه إلى مناطق وربط اتجاه الدفع وشدته والالتواء بأوامر، يمكن للشخص أن يوجّه سيارة روبوت صغيرة، أو يتحكم بالحركة وإطلاق النار في لعبة فيديو، أو يقود طائرة مسيرة محاكاة. يمكن أن يغيّر الضغط الأقوى السرعة أو الارتفاع، بينما يتحكم دوران طرف الإصبع في زاوية الانعراج. تساعد عتبات القوة في تجاهل اللمسات العرضية حتى تظل السيطرة سلسة. في كل هذه الحالات، يحول HexaTouch ضغطة طرف إصبع دقيقة إلى أوامر متعددة المحاور واضحة وفي الوقت الحقيقي.
ماذا يعني هذا لروبوتات الحياة اليومية
للمشاهد العادي، يشبه HexaTouch إعطاء الروبوتات نهاية عصبية صغيرة لكنها ذات قدرة ملحوظة في طرف الإصبع. من خلال الجمع بين هيكل داخلي ذكي، واستشعار كهربائي كثيف، والتعرف النمطي المعتمد على التعلم، يجمّع معلومات لمسية غنية تشبه الإنسانية في وحدة صغيرة ومتينة. يشير العمل إلى مسار نحو أيدٍ روبوتية وأجهزة أخرى يمكنها أن تشعر أين وكيف تلمس العالم بدقة أكبر بكثير، مما يجعل مهامًا مثل التعاون الآمن، والتجميع الدقيق، والتحكم الطبيعي القائم على الإيماءات أكثر قابلية للتحقيق في المواقف اليومية.
الاستشهاد: Song, Y., Wang, J., Li, Z. et al. Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions. Microsyst Nanoeng 12, 193 (2026). https://doi.org/10.1038/s41378-026-01292-3
الكلمات المفتاحية: اللمس الروبوتي, مستشعر لمسي, التفاعل بين الإنسان والآلة, التلاعب البارع, الروبوتات اللينة