Clear Sky Science · pl
Jednopalcowy sześciowykresowy interfejs dotykowy o wymiarach opuszka z wysokoprecyzyjnym pomiarem siły i lokalizacją pozycji do zręcznych interakcji człowiek–maszyna
Dlaczego odczuwanie opuszkami palców ma znaczenie dla robotów
Wyobraź sobie próbę zawiązania butów lub podłączenia kabla USB mając na rękach grube rękawice. Tak w dużym skrócie większość robotów postrzega dziś świat: potrafią poruszać się precyzyjnie, ale ich zmysł dotyku jest prymitywny. W artykule przedstawiono HexaTouch, czujnik dotyku wielkości opuszka palca, który pozwala robotom odczuwać bardziej podobnie do nas — nie tylko jak mocno naciskają, lecz też dokładnie gdzie i w jakim kierunku działają siły. Ten postęp może uczynić roboty bezpieczniejszymi, bardziej zręcznymi i łatwiejszymi w sterowaniu za pomocą prostych gestów.
Jak roboty zwykle odczuwają świat
Wiele obecnych czujników dotyku dla robotów wymienia jedną zaletę na inną. Sztywne czujniki siły są precyzyjne, ale zbyt twarde i masywne, by bezpiecznie stykać się z ludźmi. Miększe czujniki są bezpieczniejsze i mogą obchodzić obiekty, ale często wykrywają tylko nacisk prostopadły, nie rejestrując sił bocznych i skręceń. Czujniki dotykowe oparte na kamerze potrafią tworzyć bogate „obrazy dotyku” zdeformowanej gumy, lecz zwykle są większe niż opuszek palca i opierają się na delikatnej optyce, która ma trudności przy dużych obciążeniach. W efekcie niewiele istniejących rozwiązań jest jednocześnie małych, wytrzymałych i zdolnych do precyzyjnego określania złożonych sił oraz lokalizacji kontaktu.
Mały opuszek, który widzi dotyk bez kamery
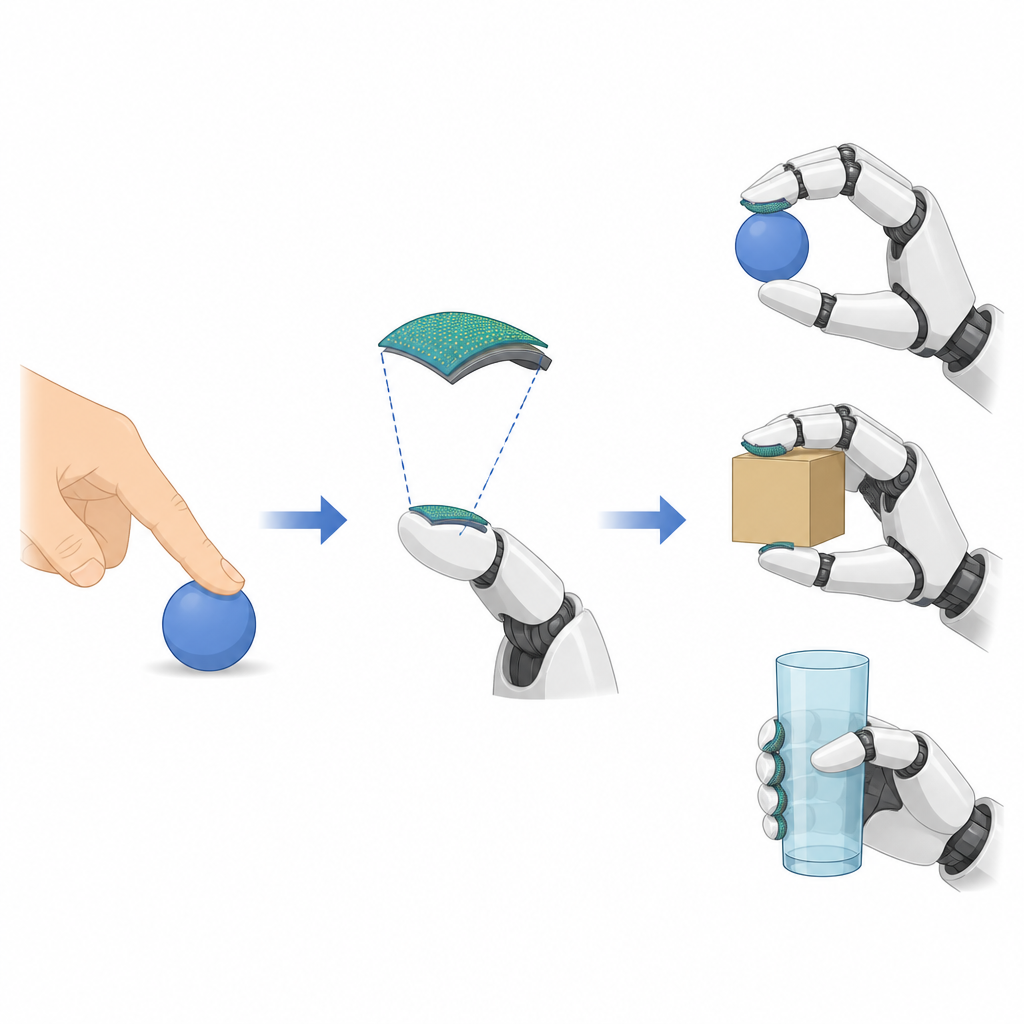
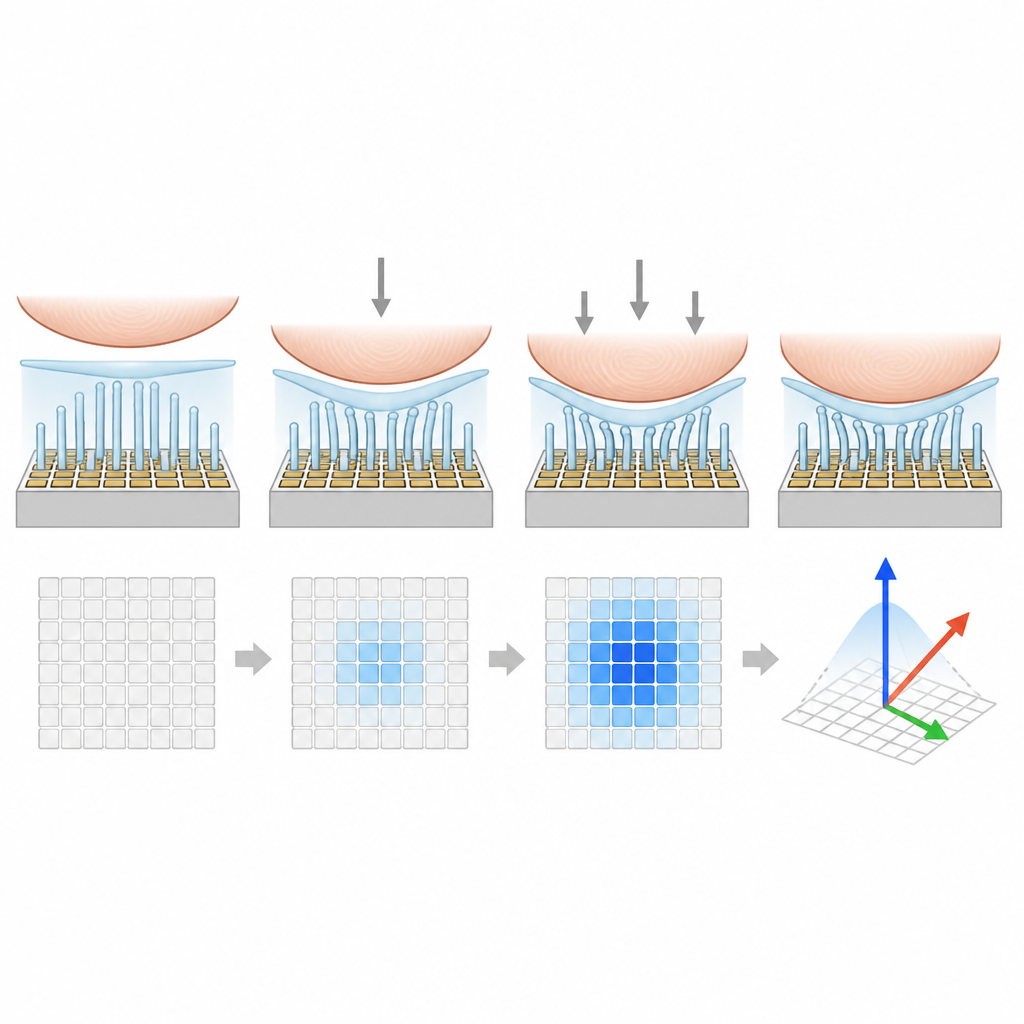
HexaTouch rozwiązuje ten problem, łącząc pomysły z czujników kamerowych i elektrycznych w kompaktowym module o wymiarach około 15 × 15 × 8 milimetrów. Na zewnątrz znajduje się miękki, zakrzywiony gumowy koniuszek przypominający kształtem ludzki palec, co pomaga obejmować przedmioty. Ukryta wewnątrz tej nakładki jest starannie zaprojektowana „puszcza” malutkich gumowych słupków o zmiennej wysokości na powierzchni. Słupki są uziemione przewodząco, więc pod naciskiem stykają się z gęstą siatką podkładek kondensatorów na mikrochipie poniżej. Zamiast robić zdjęcie kamerą, układ mierzy zmiany pojemności elektrycznej na każdej podkładce, tworząc szczegółową mapę w odcieniach szarości pokazującą, jak powierzchnia jest wciskana, ścinana czy skręcana.
Nauka czytania wzorców dotyku
Różna wysokość słupków to nie zabieg kosmetyczny. Wyższe słupki stykają się pierwsze, a krótsze angażują się w miarę wzrostu siły, rozkładając odpowiedź na szeroki zakres obciążeń i sprawiając, że wzorce stają się bardziej rozróżnialne dla różnych kierunków i momentów skręcających. Symulacje komputerowe i eksperymenty pokazują, że ta stopniowana struktura czyni sensor bardziej czułym na boczne naciski i skręcania niż jednolita siatka słupków, przy jednoczesnym radzeniu sobie z większymi siłami bez nasycenia. Zarejestrowane obrazy dotyku trafiają następnie do systemu uczenia maszynowego podobnego do tych używanych w rozpoznawaniu obrazów. Głęboka sieć neuronowa uczy się tłumaczyć każdy wzorzec na sześcioskładowe odczyty sił i momentów — w trzech kierunkach i trzech obrotach — oraz na trójwymiarową pozycję kontaktu.
Od precyzyjnego chwytu po sterowanie dronem
Dzięki temu dekodowaniu opuszek staje się szybkim, precyzyjnym instrumentem dotykowym. Testy pokazują, że HexaTouch szacuje siły z błędami poniżej około półtora procenta i potrafi zlokalizować głębokość kontaktu z dokładnością do jednej dziesiątej milimetra. Działa niezawodnie w szerokim zakresie temperatur i wilgotności oraz po dniach powtarzalnego obciążania. Zamontowany na palcach robota sensor pozwala dłoni korygować chwyt podczas fazy przedchwycenia, przesuwając punkty kontaktu aż do stabilnego utrzymania przedmiotu zamiast poślizgu. To samo rozpoznawanie pomaga robotowi włożyć wtyczkę USB mimo niewielkich niedopasowań, wyczuwając subtelne zmiany siły i momentów oraz korygując ruch zanim dojdzie do zacięcia.
Dotyk jako nowy język sterowania
Autorzy pokazują też, jak ten sam opuszek może służyć jako prosty, intuicyjny panel sterujący dla maszyn. Dzieląc powierzchnię na regiony i mapując kierunek nacisku, siłę i skręcanie na polecenia, osoba może sterować małym robotem-auta, poruszać się i strzelać w grze wideo lub pilotować symulowany dron. Mocniejsze naciśnięcie może zmieniać prędkość lub wysokość, a obrót opuszką steruje odchyleniem yaw. Progi siły pomagają ignorować przypadkowe dotknięcia, dzięki czemu sterowanie pozostaje płynne. We wszystkich tych zastosowaniach HexaTouch przekształca subtelne naciski opuszków w jasne, wieloosiowe polecenia w czasie rzeczywistym.
Co to oznacza dla codziennej robotyki
Dla laika HexaTouch przypomina nadanie robotom małego, ale niezwykle zdolnego zakończenia nerwowego opuszka palca. Łącząc przemyślaną wewnętrzną strukturę, gęste pomiary elektryczne i rozpoznawanie wzorców oparte na uczeniu, upakowuje bogate, przypominające ludzkie informacje dotykowe w małym, wytrzymałym module. Praca ta wskazuje drogę ku dłoniom robotycznym i innym urządzeniom, które będą mogły o wiele subtelniej wyczuwać gdzie i jak dotykają świata, ułatwiając zadania takie jak bezpieczna współpraca, delikatny montaż czy naturalne sterowanie gestami w codziennych zastosowaniach.
Cytowanie: Song, Y., Wang, J., Li, Z. et al. Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions. Microsyst Nanoeng 12, 193 (2026). https://doi.org/10.1038/s41378-026-01292-3
Słowa kluczowe: dotyk robotyczny, czujnik dotyku, interakcja człowiek–maszyna, zręczna manipulacja, miękka robotyka