Clear Sky Science · pt
Interface tátil de seis eixos em escala de ponta de dedo com sensoriamento de força de alta precisão e localização de posição para interações humano–máquina hábeis
Por que a sensibilidade da ponta do dedo importa para robôs
Imagine tentar amarrar os sapatos ou conectar um cabo USB usando luvas grossas. É assim que a maioria dos robôs percebe o mundo hoje: conseguem se mover com precisão, mas seu sentido do tato é rudimentar. Este artigo apresenta o HexaTouch, um sensor de toque do tamanho de uma ponta de dedo que ajuda robôs a sentir de forma mais parecida com a nossa — detectando não apenas a força aplicada, mas também exatamente onde e em que direção as forças atuam. Esse avanço pode tornar os robôs mais seguros, mais hábeis e mais fáceis de controlar por pessoas usando gestos simples.
Como os robôs geralmente percebem o mundo
Muitos sensores táteis robóticos atuais trocam uma vantagem por outra. Sensores de força rígidos são precisos, mas muito duros e volumosos para contato seguro com pessoas. Sensores mais macios são mais seguros e podem envolver objetos, mas frequentemente detectam apenas pressão perpendicular, perdendo forças laterais e torques. Sensores táteis baseados em câmera podem criar ricas "imagens de toque" de borracha deformada, porém tendem a ser maiores que uma ponta de dedo e dependem de óptica delicada que sofre com cargas elevadas. O resultado é que poucos sistemas existentes conseguem ser simultaneamente pequenos, robustos e capazes de identificar forças complexas e localizações de contato com precisão.
Uma pequena ponta de dedo que percebe o toque sem câmera
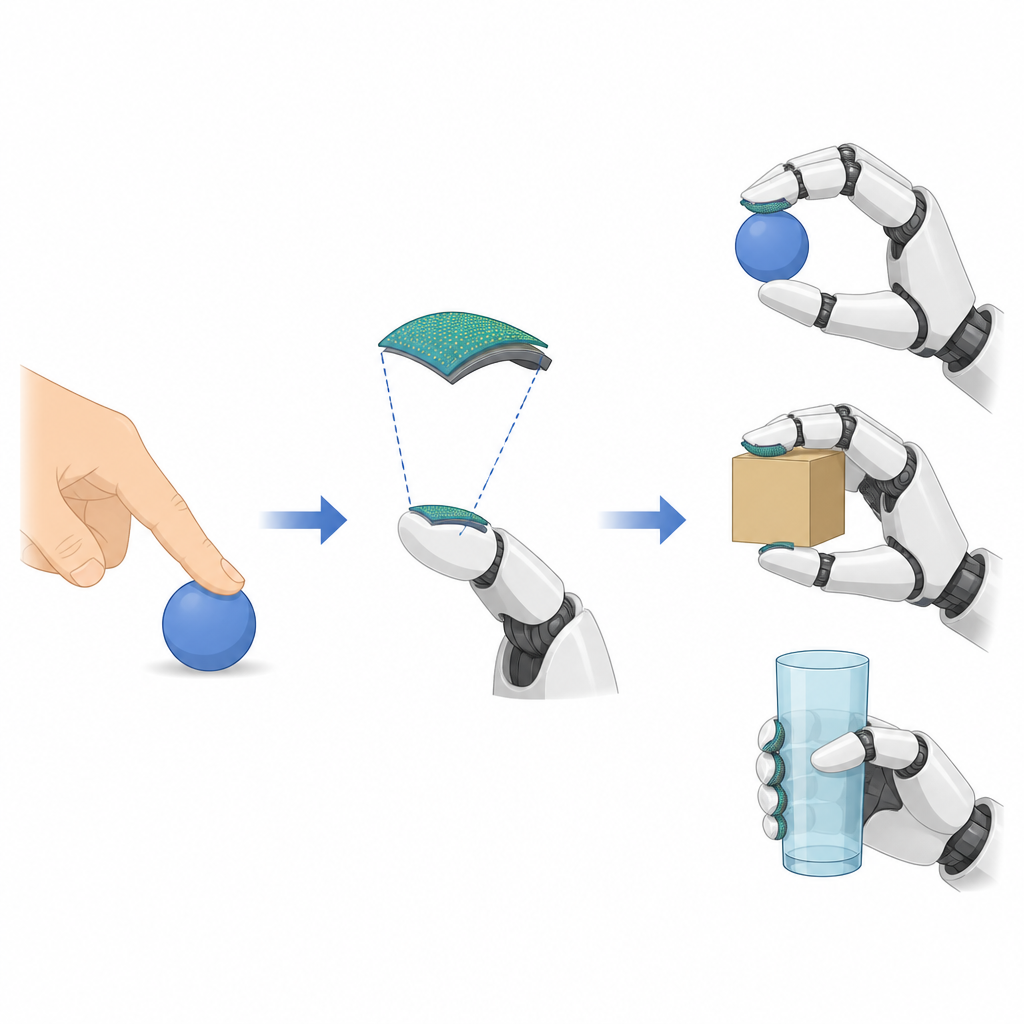
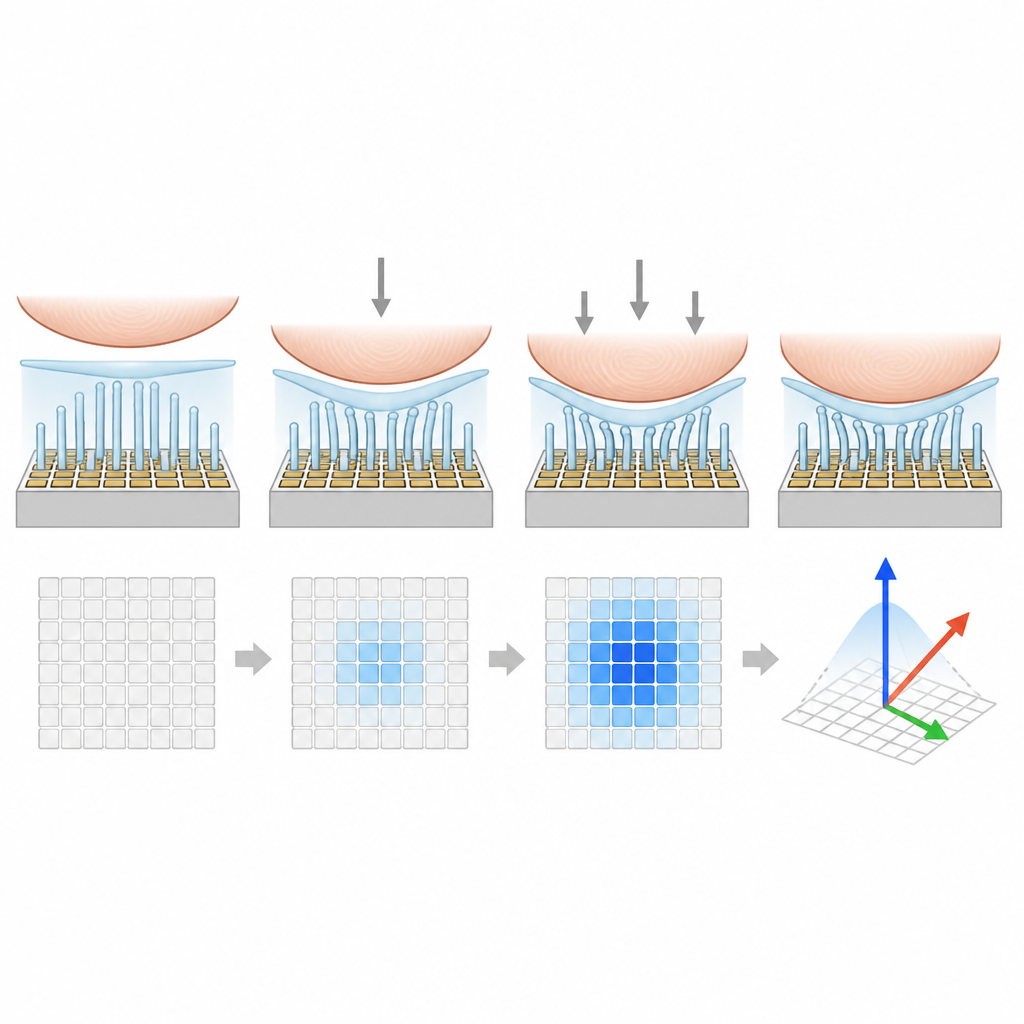
O HexaTouch resolve esse problema ao combinar ideias de sensores baseados em câmera e de sensoriamento elétrico em um bloco compacto de ponta de dedo com cerca de 15 por 15 por 8 milímetros. No topo há uma capa de borracha curva e macia que imita a forma do dedo humano, ajudando a envolver objetos. Escondida dentro dessa capa está uma floresta cuidadosamente projetada de minúsculos pilares de borracha com alturas variadas pela superfície. Esses pilares tornam-se condutivos de modo que, quando pressionados, tocam uma densa grade de pads capacitivos em um microchip abaixo deles. Em vez de tirar uma foto com uma câmera, o chip mede mudanças na capacitância elétrica em cada pad, formando um mapa em tons de cinza detalhado de como a superfície está sendo pressionada, sujeita a cisalhamento ou torção.
Aprendendo a ler padrões de toque
As alturas variadas dos pilares não são um detalhe cosmético. Pilares mais altos tocam primeiro e os mais curtos entram em contato à medida que a força aumenta, espalhando a resposta ao longo de uma ampla faixa de cargas e tornando os padrões mais distintivos para diferentes direções e torques. Simulações e experimentos mostram que essa estrutura graduada torna o sensor mais sensível a empurrões laterais e torções do que uma matriz de pilares uniforme, enquanto ainda suporta forças maiores sem saturar. A equipe então alimenta as imagens de toque em um sistema de aprendizado de máquina semelhante aos usados em reconhecimento de imagem. Uma rede neural profunda aprende a traduzir cada padrão em uma leitura de seis componentes de força e torque — ao longo de três direções e três rotações — juntamente com uma posição de contato tridimensional.
Do aperto cuidadoso ao voo de drone
Com essa decodificação em funcionamento, a ponta do dedo torna-se um instrumento tátil rápido e preciso. Testes mostram que o HexaTouch estima forças com erros abaixo de cerca de um e meio por cento e pode localizar a profundidade de contato com precisão de uma décima de milímetro. Mantém operação confiável em uma faixa de temperaturas e umidades e após dias de carregamento repetido. Montado em dedos robóticos, o sensor permite que uma mão ajuste sua preensão durante uma fase pré-agarre, deslocando pontos de contato até que um objeto seja segurado de forma estável em vez de escorregar. A mesma sensibilidade ajuda um robô a inserir um plugue USB apesar de pequenos desalinhamentos, percebendo mudanças sutis em força e torque e corrigindo seu movimento antes de enroscar.
O toque como uma nova linguagem de controle
Os autores também demonstram como a mesma ponta de dedo pode atuar como um painel de controle simples e intuitivo para máquinas. Ao dividir sua superfície em regiões e mapear direção de pressão, intensidade e torção para comandos, uma pessoa pode dirigir um pequeno robô carro, mover-se e atirar em um videogame, ou pilotar um drone simulado. Pressionar mais forte pode alterar velocidade ou altitude, enquanto girar a ponta controla o guinada. Limiares de força ajudam a ignorar toques acidentais para manter o controle suave. Em todos esses casos, o HexaTouch transforma pressões sutis da ponta do dedo em comandos claros e multiaxiais em tempo real.
O que isso significa para a robótica do dia a dia
Para um observador leigo, o HexaTouch é como dar aos robôs uma pequena, porém notavelmente capaz, terminação nervosa na ponta do dedo. Ao combinar uma estrutura interna inteligente, sensoriamento elétrico denso e reconhecimento de padrões por aprendizado, ele embala informações táteis ricas e semelhantes às humanas em um módulo diminuto e robusto. O trabalho sugere um caminho em direção a mãos robóticas e outros dispositivos que possam sentir onde e como tocam o mundo com muito mais sutileza, tornando tarefas como colaboração segura, montagem delicada e controle natural por gestos mais alcançáveis em cenários cotidianos.
Citação: Song, Y., Wang, J., Li, Z. et al. Fingertip-scale six-axis tactile interface with high-precision force sensing and position localization for dexterous human–machine interactions. Microsyst Nanoeng 12, 193 (2026). https://doi.org/10.1038/s41378-026-01292-3
Palavras-chave: toque robótico, sensor tátil, interação humano-máquina, manipulação hábil, robótica macia