Clear Sky Science · tr
SVRS: stereovizyondan kendinden denetimli 3B voxel yeniden yapılandırma ağı
Daha Güvenli Robotlar İçin Dünyayı 3B Görmek
Sürücüsüz arabalar ve servis robotları, çarpışmalardan kaçınmak ve güvenli gezinti sağlamak için çevrelerindeki dünyanın şeklini üç boyutta anlamalıdır. Bu çalışma, sıradan kamera çiftlerini yakındaki nesnelerin detaylı bir 3B ızgara haritasına daha hızlı ve daha doğru şekilde dönüştüren bir yöntem tanıtıyor; böylece gelecekteki robotların pahalı lazer sensörlerine ihtiyaç duymadan daha güvenilir olmasını sağlayabilir.
Yassı Fotoğraflardan Katı Mekâna
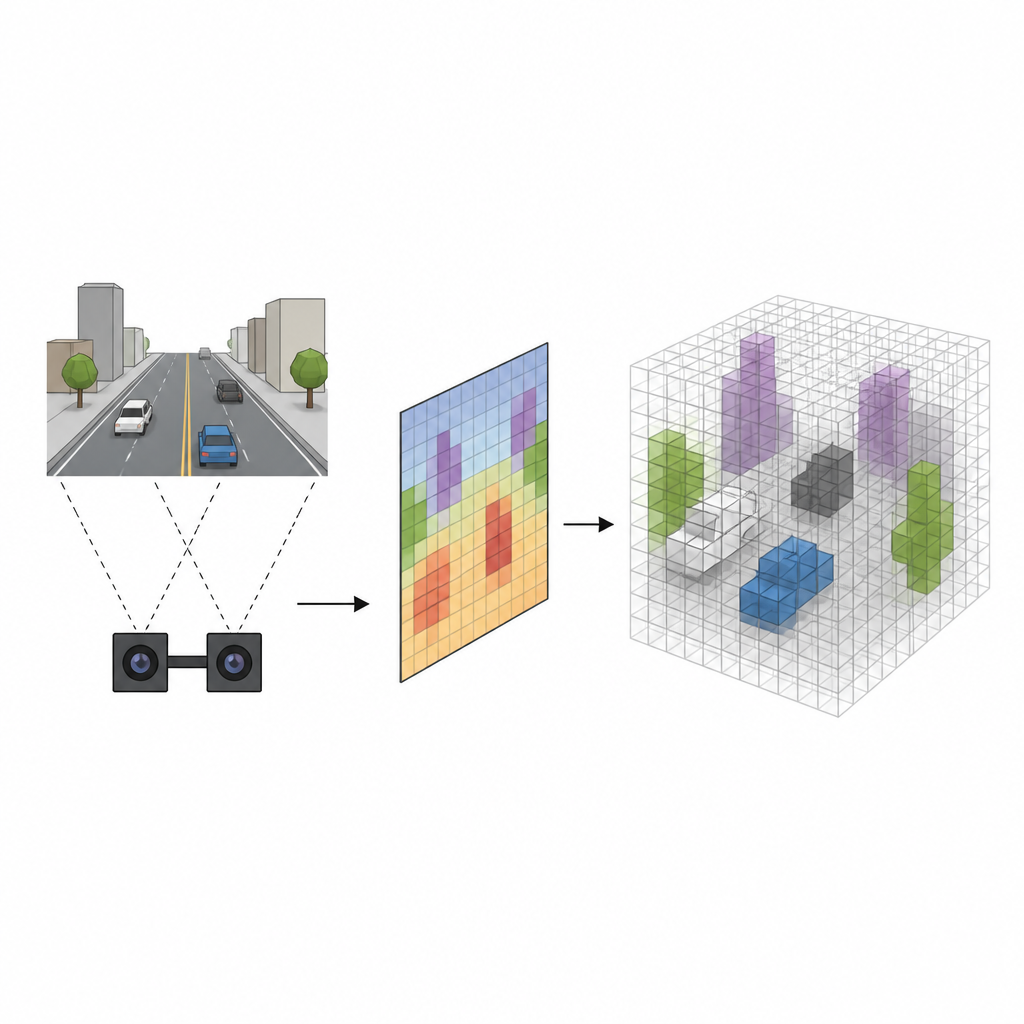
Çoğu robot, gözlerimiz gibi sahneye iki biraz farklı bakış açısından bakan stereo kameralar kullanır. Geleneksel sistemler önce her pikselin kameradan ne kadar uzakta olduğunu tahmin eder, sonra her pikseli 3B uzaya projekte ederek nesnelerin olabileceği yerleri işaretleyen küçük küplerden oluşan voxel ızgarasını doldurur. Bu yöntem işe yarasa da yavaştır ve nesnelerin kenarlarını bulanıklaştırma eğilimindedir; boş alanlar yanlışlıkla dolu olarak işaretlenerek yanlış alarmlara yol açar. SVRS adı verilen yeni yaklaşım, ağır piksel tek tek projeksiyonunu atlayıp kameraların gördükleri ile uzaydaki hangi küplerin gerçekten dolu olduğu arasında daha doğrudan bir bağlantı öğrenir.
Ağı Küplerde Düşünmeye Öğretmek
Araştırmacılar aracın önündeki alanı birlikte bir 3B ızgara oluşturan eşit küpler yığını olarak temsil ediyor. Pikselden başlayıp onları uzaya itmek yerine, Pixel Voxel Projecting Module her küpten başlayıp o küpün kamera görüntülerinde nerede görüneceğini sorar. Stereo kameraların bilinen geometrisini kullanarak modül her küpü iki görüntüye geri projekte eder ve modern stereo ağların hesapladığı zengin iç özellikleri örnekler. Bu, yoğun resim bilgisini her küple doğrudan ilişkili seyrek bir 3B sinyale çevirir, boş bölgelerde gereksiz işi azaltır ve yanlış pozitiflere yol açan kenar bulanıklığını azaltır.
Önemli Yerlerde Ayrıntıya Odaklanmak
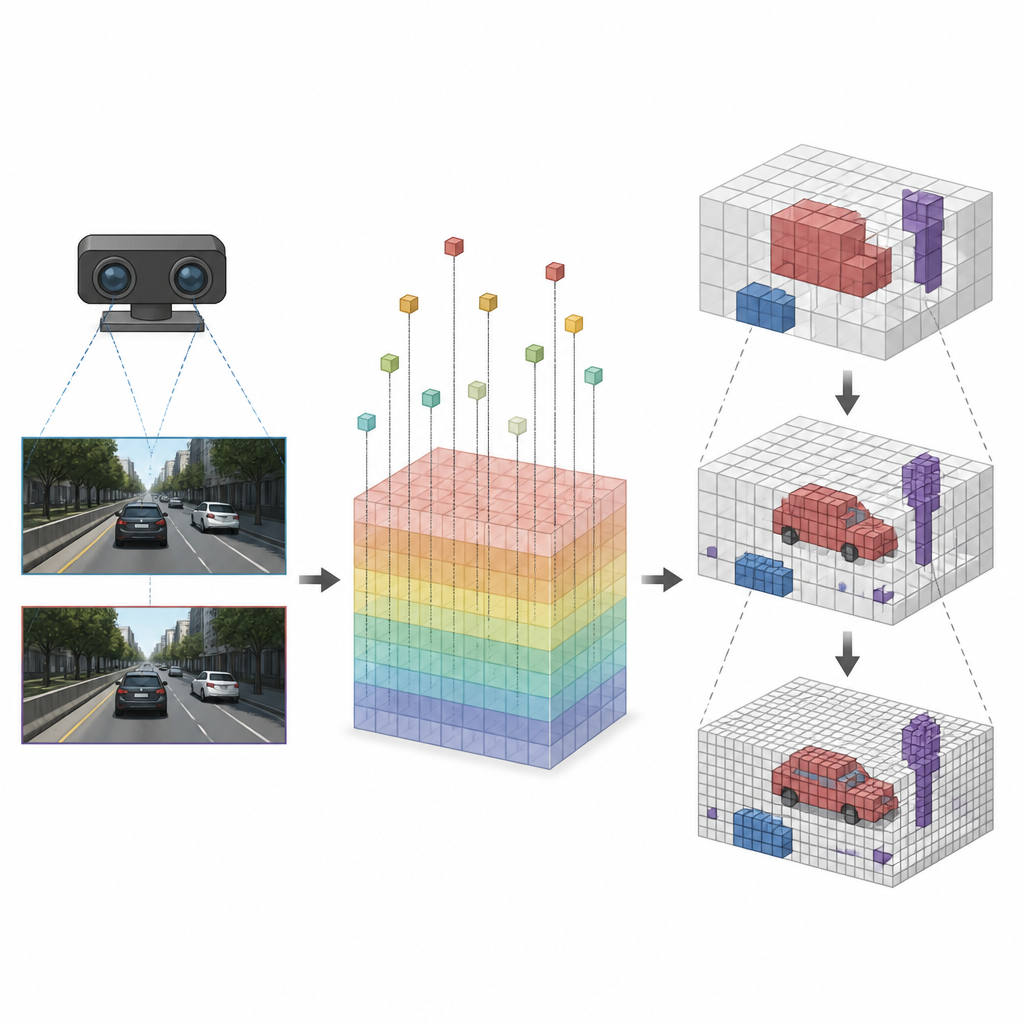
Her küp doğru görüntü özellikleriyle ilişkilendirildikten sonra, SVRS hangi küplerin dolu olduğunu belirlemek için Octree tabanlı bir Kodlayıcı-Çözücü Mimarisi uygular. Fikir, sahnenin kaba bir görünümüyle başlayıp adım adım rafine etmektir. Her seviyede ağ hangi büyük küplerin içinde bir şey olduğunu tahmin eder ve bu bilgiyi bir sonraki, daha ince seviye için rehber olarak kullanır; yalnızca umut verici bölgeler ayrıntılı şekilde incelenir. Boş alanlar erken aşamada bastırılır, böylece ağ yakınlaştırırken bunlar ağı bunaltmaz. Bu kaba'dan ince'ye strateji, hesaplamaları açık havada harcanan çabayı azaltıp araçlar, yol kenarları ve diğer önemli nesnelere odaklı tutar.
Elle Etiket Gerektirmeden Mevcut Sensörlerden Öğrenmek
Sistemi eğitmek için yazarlar 3B sahneleri elle etiketleme gibi maliyetli bir işe başvurmuyor. Bunun yerine, güçlü mevcut stereo ve lazer tabanlı yöntemlerin ürettiği derinlik haritalarını ve nokta bulutlarını öğretim sinyalleri olarak kullanıyorlar. Stereo derinliği basit bir kenar algılayıcıyla temizlenip 3B ızgaraya dönüştürülüyor ve ayrıca doğrudan lazer ölçümlerine karşı eğitim yapma denemeleri de yapılıyor. Bu kendinden denetimli düzenek, ağın yüksek kaliteli 3B veriyi taklit etmesine izin verirken çalışma zamanında çok daha hafif ve hızlı olmasını sağlıyor; bu da araçlardaki gömülü bilgisayarlar için pratik kılıyor.
Hareket Halindeki Makineler İçin Daha Hızlı ve Daha Temiz 3B Görüntüler
Büyük bir sürüş veri setindeki testler, SVRS'nin 3B ızgaraları önde gelen stereo tabanlı yöntemler kadar doğru şekilde yeniden oluşturduğunu ve bazı güçlü temel yöntemlere kıyasla çalışırken on dört kata kadar daha hızlı, diğer gerçek zamanlı sistemlerden ise yaklaşık üç kat daha hızlı olduğunu gösteriyor. Boş alanın dolu olduğu yönünde daha az yanlış iddiada bulunuyor, fakat bazı küçük nesneleri kaçırabiliyor; bu dikkat ile tamlık arasındaki bir dengeyi yansıtıyor. Genel okuyucu için ana mesaj, yöntemin makinelerin kamera görüntülerini yolun önündeki daha net, daha verimli bir 3B resme dönüştürmesine yardımcı olduğu; bu da daha güvenli ve yetenekli otonom araçlar ve robotlar için önemli bir adım.
Atıf: Zou, Z., Wu, Y., Zhang, H. et al. SVRS: self-supervised 3D voxel reconstruction network from stereo vision. Sci Rep 16, 15548 (2026). https://doi.org/10.1038/s41598-026-45924-0
Anahtar kelimeler: stereo vizyon, 3B yeniden yapılandırma, voxel ızgarası, otonom sürüş, robot algısı