Clear Sky Science · nl
SVRS: zelf-gestuurde 3D-voxelreconstructienetwerk uit stereozicht
De wereld in 3D zien voor veiligere robots
Zelfrijdende auto’s en servicerobots moeten de vorm van hun omgeving in drie dimensies begrijpen om botsingen te vermijden en veilig te navigeren. Deze studie introduceert een snellere en nauwkeurigere manier om paren gewone camera-afbeeldingen om te zetten in een gedetailleerde 3D-roosterkaart van nabije objecten, wat toekomstige robots betrouwbaarder kan maken zonder dure lasersensoren.
Van platte beelden naar vaste ruimte
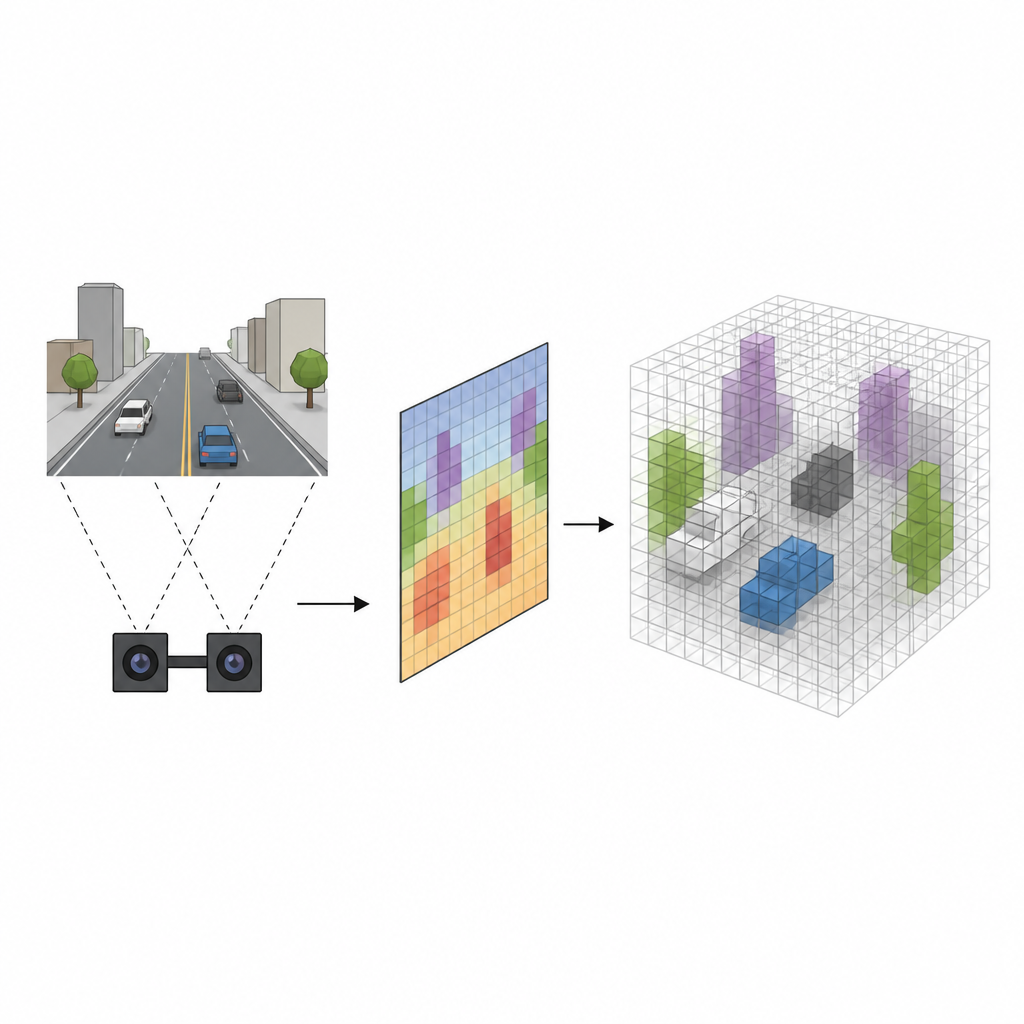
Veel robots gebruiken stereocamera’s die een scène vanuit twee iets verschillende gezichtspunten bekijken, vergelijkbaar met onze ogen. Traditionele systemen schatten eerst hoe ver elke pixel van de camera is en projecteren vervolgens elke pixel in 3D-ruimte, waarbij een raster van kleine blokjes—voxels—gevuld wordt die aangeven waar objecten kunnen zijn. Hoewel deze methode werkt, is ze traag en heeft ze de neiging om objectranden te vervagen, wat vals alarm veroorzaakt wanneer lege ruimte onterecht als bezet wordt gemarkeerd. De nieuwe aanpak, SVRS genoemd, slaat die zware pixel-voor-pixelprojectie over en leert in plaats daarvan een directere koppeling tussen wat de camera’s zien en welke blokjes in de ruimte daadwerkelijk gevuld zijn.
Het netwerk leren in blokken te denken
De onderzoekers representeren het gebied voor een voertuig als een stapel uniforme blokjes die samen een 3D-rooster vormen. In plaats van vanuit pixels te beginnen en die naar de ruimte te duwen, begint hun Pixel Voxel Projecting Module bij elk blokje en vraagt waar het in de camerabeelden zou verschijnen. Met behulp van de bekende geometrie van de stereocamera’s projecteert de module elk blokje terug in de twee afbeeldingen en samplet de rijke interne kenmerken die moderne stereonetwerken berekenen. Dit verandert dichte beeldinformatie in een schaarse 3D-signaal verbonden met elk blokje, waardoor nutteloos werk in lege gebieden wordt uitgesneden en de randvervaging die vals positieven veroorzaakt afneemt.
Detail richten waar het ertoe doet
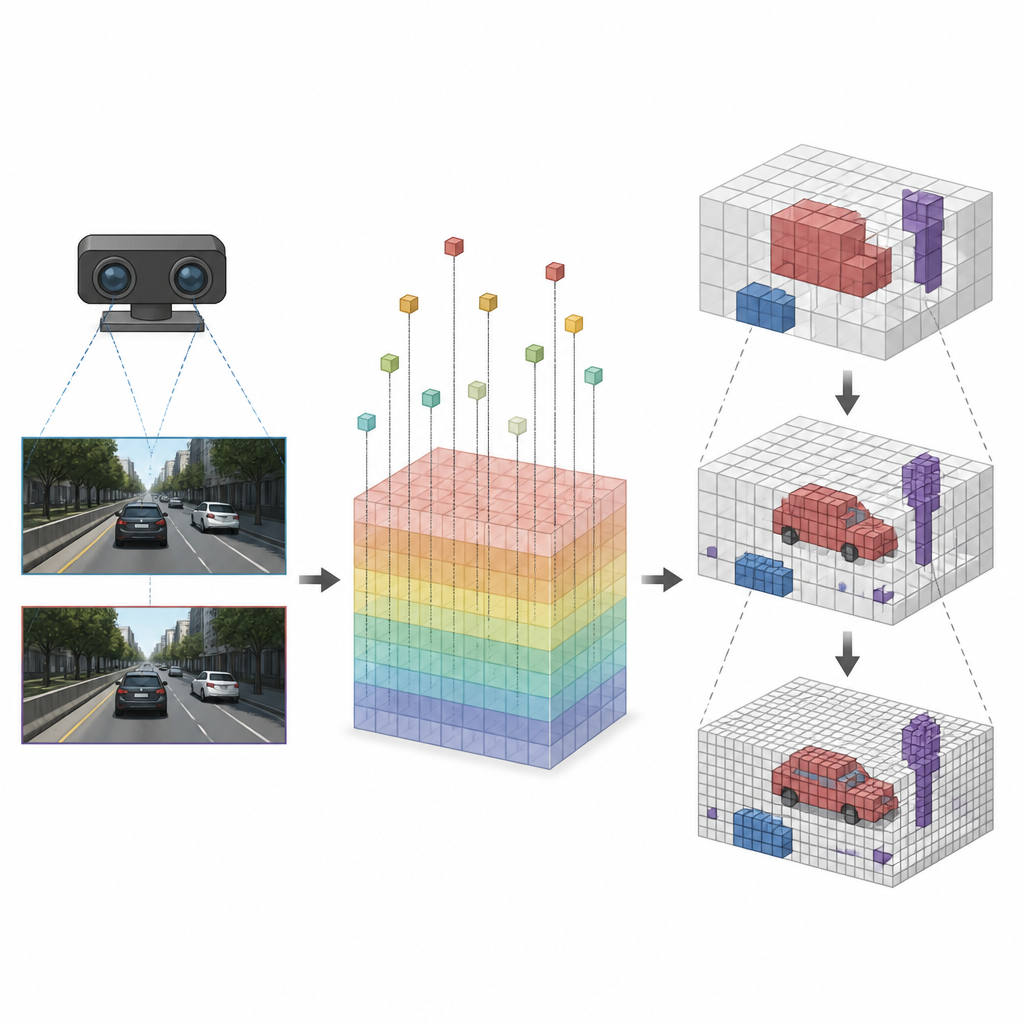
Zodra elk blokje is gekoppeld aan de juiste afbeeldingskenmerken, past SVRS een octree-gebaseerde encoder-decoderarchitectuur toe om te beslissen welke blokjes bezet zijn. Het idee is te beginnen met een grove blik op de scène en deze vervolgens stap voor stap te verfijnen. Op elk niveau voorspelt het netwerk welke grote blokken iets bevatten en gebruikt die informatie om het volgende, fijnere niveau te sturen, waar alleen veelbelovende regio’s in detail worden onderzocht. Lege gebieden worden vroeg onderdrukt zodat ze het netwerk niet overweldigen terwijl het inzoomt. Deze van grof naar fijn strategie houdt de berekeningen gericht op auto’s, wegranden en andere belangrijke objecten in plaats van inspanning te verspillen aan open lucht.
Leren van bestaande sensoren zonder handmatige labels
Om het systeem te trainen vermijden de auteurs de kostbare taak van handmatig labelen van 3D-scènes. In plaats daarvan gebruiken ze dieptenkaarten en point clouds geproduceerd door sterke bestaande stereogebaseerde en lasergebaseerde methoden als leersignalen. Ze maken stereo-diepte schoon met een eenvoudige randdetector voordat ze die in een 3D-rooster omzetten, en experimenteren ook met directe training tegen lasermetingen. Deze zelf-gesuperviseerde opzet laat het netwerk hoogkwalitatieve 3D-gegevens imiteren terwijl het tijdens runtime veel lichter en sneller blijft, wat het praktisch maakt voor ingebedde computers in voertuigen.
Snellere en schonere 3D-weergaven voor bewegende machines
Tests op een grote rijdataset tonen dat SVRS 3D-roosters reconstructeert even nauwkeurig als vooraanstaande stereogebaseerde methoden, terwijl het tot veertien keer sneller draait dan sommige sterke baselines en ongeveer drie keer sneller dan andere realtime-systemen. Het geeft minder vaak ten onrechte aan dat lege ruimte bezet is, hoewel het enkele kleine objecten kan missen — een weerspiegeling van de balans tussen voorzichtigheid en volledigheid. Voor een leek is de kernboodschap dat de methode machines helpt om camera-afbeeldingen om te zetten in een helderder, efficiënter 3D-beeld van de weg vooruit, wat een belangrijke stap is naar veiligere en capabelere autonome voertuigen en robots.
Bronvermelding: Zou, Z., Wu, Y., Zhang, H. et al. SVRS: self-supervised 3D voxel reconstruction network from stereo vision. Sci Rep 16, 15548 (2026). https://doi.org/10.1038/s41598-026-45924-0
Trefwoorden: stereozicht, 3D-reconstructie, voxelrooster, autonoom rijden, robotperceptie