Clear Sky Science · ja
SVRS: ステレオ視からの自己教師付き3Dボクセル再構築ネットワーク
より安全なロボットのために世界を3Dで見る
自律走行車やサービスロボットは、衝突を避け安全に移動するために周囲の世界の形状を三次元で理解する必要がある。本研究は、一般的なカメラの画像ペアを近傍物体の詳細な3Dグリッド地図に変換する、より高速かつ高精度な方法を示しており、高価なレーザーセンサを必要とせずに将来のロボットの信頼性を高める可能性がある。
平面画像から実体空間へ
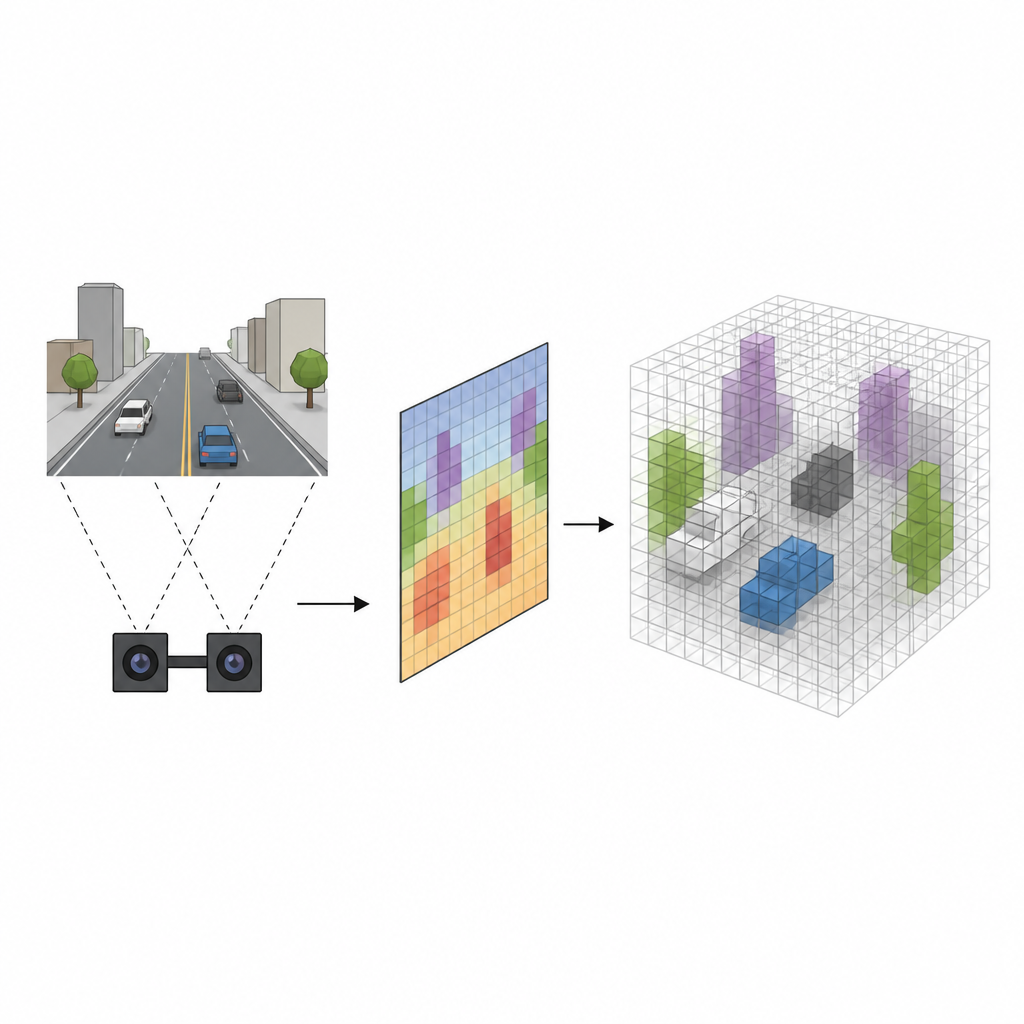
多くのロボットは、人間の目のようにわずかに異なる視点からシーンを撮影するステレオカメラを使う。従来のシステムはまず各ピクセルのカメラからの距離を推定し、その後各ピクセルを3D空間に投影してボクセルと呼ばれる小さな立方体のグリッドを埋め、物体の存在する可能性を示していた。この方法は機能するが処理が遅く、物体の境界がぼやけて誤検出を生みやすい。新しい手法SVRSは、この重いピクセル単位の投影を省略し、カメラの観測と空間内で実際に埋まっているボクセルとのより直接的な対応を学習する。
ネットワークに立方体で考えさせる
研究者らは車両前方の領域を均一な立方体の積み重ねとして表現し、これらが3Dグリッドを構成する。ピクセルから始めてそれを空間へ押し出す代わりに、彼らのPixel Voxel Projecting Moduleは各立方体から出発して、それがカメラ画像上でどこに現れるかを問う。既知のステレオカメラ幾何を用いて各立方体を二つの画像へ逆投影し、現代のステレオネットワークが計算する豊かな内部特徴をサンプリングする。これにより密な画像情報が各立方体に直接結びつく疎な3D信号に変わり、空の領域での無駄な処理を削ぎ落とし、誤検出を招く境界のぼやけを低減する。
重要な箇所に詳細を集中させる
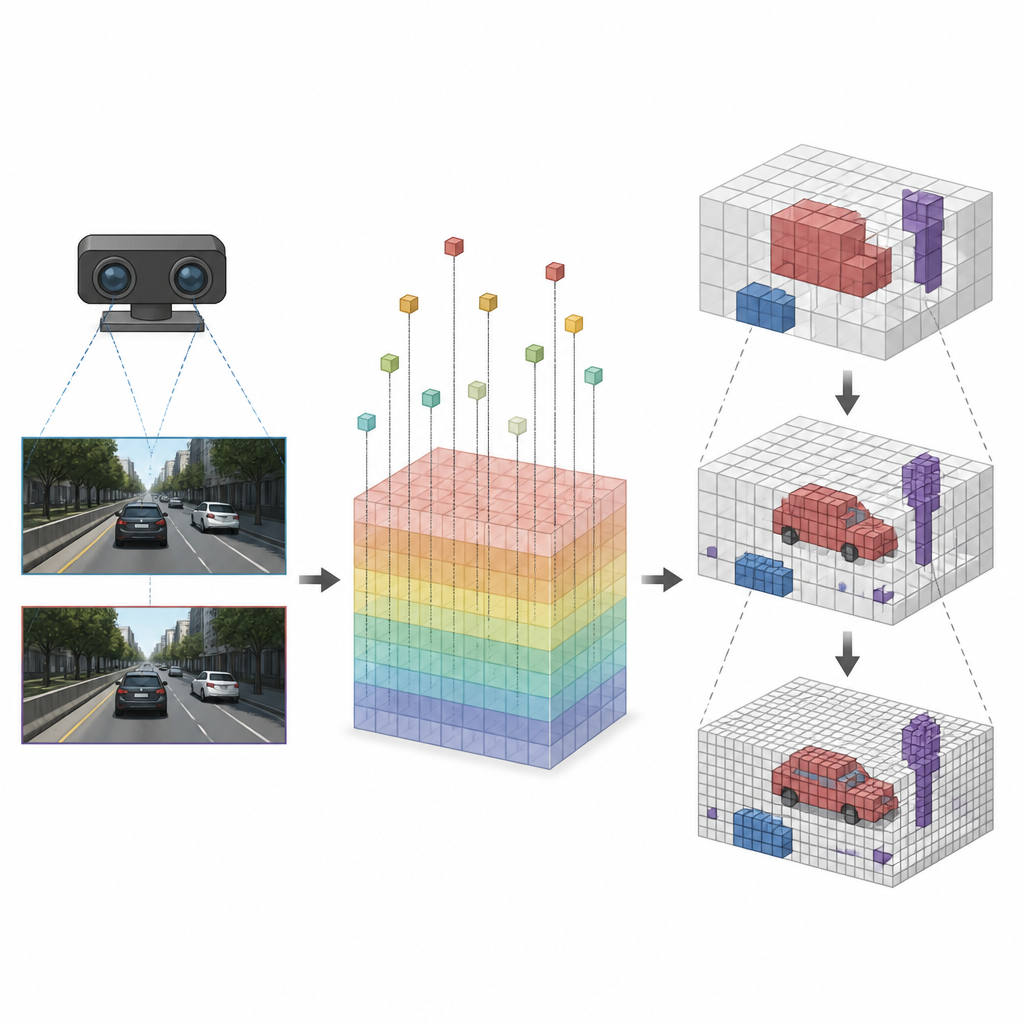
各立方体が適切な画像特徴に結びついた後、SVRSはOctreeベースのエンコーダ・デコーダアーキテクチャを適用してどの立方体が占有されているかを判断する。考え方は粗い視点から始めて段階的に洗練することだ。各レベルでネットワークはどの大きな立方体が物体を含むかを予測し、その情報を次のより細かいレベルの案内に使う。可能性の高い領域だけを詳細に調べ、空の領域は早期に抑制されるため、ズームインしてもネットワークが圧倒されない。この粗から細への戦略により、計算は開けた空間に無駄を費やすことなく車両や道路端、その他重要な物体に集中する。
手動ラベルなしで既存センサから学ぶ
システムの学習には、3Dシーンを手作業でラベル付けするコストの高い作業を避ける。代わりに強力な既存のステレオやレーザーベースの手法が生成する深度マップや点群を教師信号として用いる。ステレオ深度は単純なエッジ検出器でクリーンアップしてから3Dグリッドに変換し、レーザー測定に直接対して学習する実験も行う。この自己教師付きの設定により、ネットワークは高品質な3Dデータを模倣しつつ、実行時にははるかに軽く高速に動作し、車載の組み込みコンピュータで実用的になる。
移動する機械のためのより速くよりクリーンな3Dビュー
大規模な走行データセットでのテストにより、SVRSは主要なステレオベース手法と同等の精度で3Dグリッドを再構築しつつ、強力なベースラインのいくつかより最大14倍、他のリアルタイムシステムより約3倍速く動作することが示された。空間が占有されていると誤って主張する頻度は減るが、小さな物体を見落とすことがある点は残り、慎重さと完全性のバランスを反映している。一般読者にとっての主要なメッセージは、この手法がカメラ画像をより明瞭で効率的な道路前方の3D像へ変換するのに役立ち、より安全で能力の高い自律走行車やロボットに向けた重要な一歩であるということだ。
引用: Zou, Z., Wu, Y., Zhang, H. et al. SVRS: self-supervised 3D voxel reconstruction network from stereo vision. Sci Rep 16, 15548 (2026). https://doi.org/10.1038/s41598-026-45924-0
キーワード: ステレオビジョン, 3D再構築, ボクセルグリッド, 自動運転, ロボット知覚