Clear Sky Science · pt
SVRS: rede de reconstrução 3D em voxels auto-supervisionada a partir de visão estéreo
Ver o Mundo em 3D para Robôs Mais Seguros
Carros autônomos e robôs de serviço precisam entender a forma do mundo ao redor em três dimensões para evitar colisões e navegar com segurança. Este estudo apresenta uma maneira mais rápida e precisa de converter pares de imagens de câmera comuns em um mapa 3D detalhado em grade de objetos próximos, potencialmente tornando futuros robôs mais confiáveis sem a necessidade de sensores a laser caros.
De Imagens Planas para Espaço Sólido
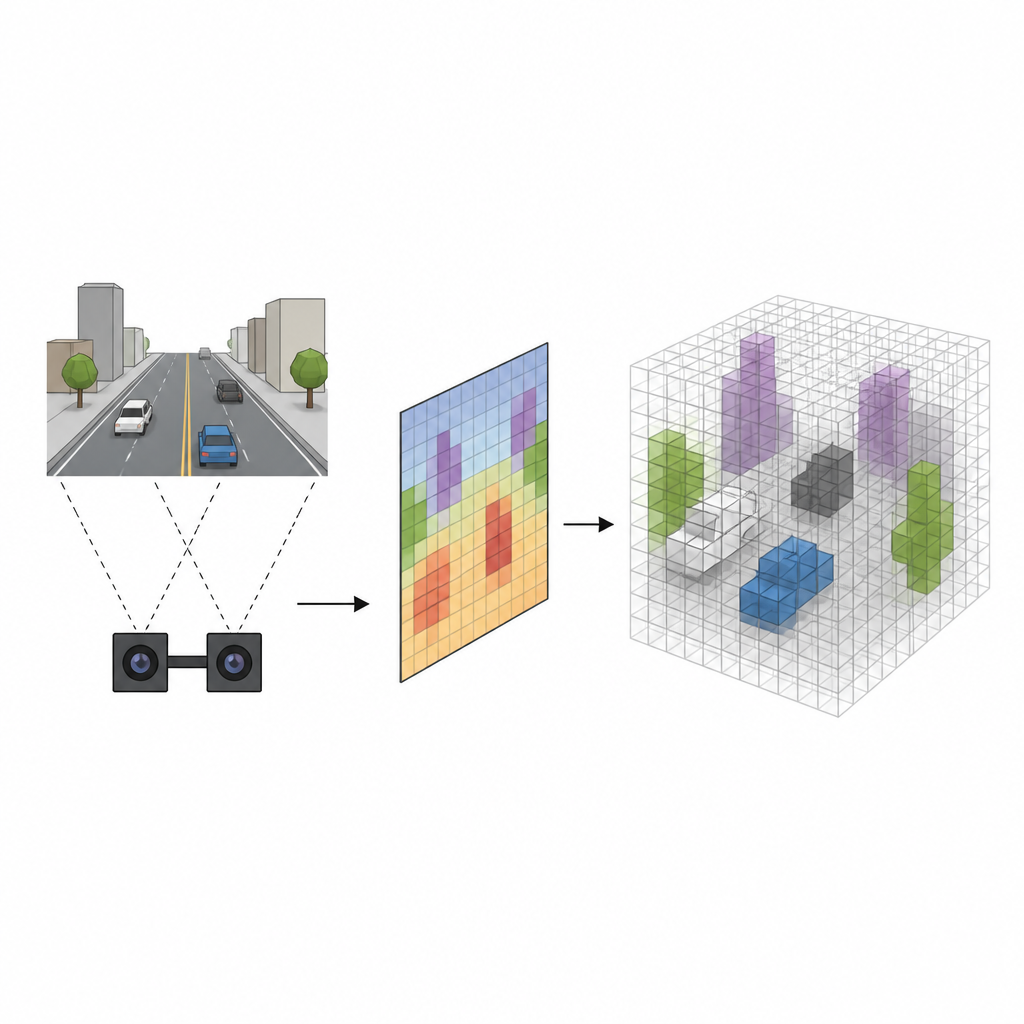
Muitos robôs usam câmeras estéreo, que observam uma cena a partir de dois pontos de vista ligeiramente diferentes, assim como nossos olhos. Sistemas tradicionais primeiro estimam a distância de cada pixel até a câmera e então projetam cada pixel no espaço 3D, preenchendo uma grade de pequenos cubos chamados voxels que indicam onde objetos podem estar. Embora esse método funcione, ele é lento e tende a borrar as bordas dos objetos, criando alarmes falsos onde espaço vazio é marcado incorretamente como ocupado. A nova abordagem, chamada SVRS, evita essa projeção pesada pixel a pixel e, em vez disso, aprende uma conexão mais direta entre o que as câmeras veem e quais cubos no espaço estão realmente preenchidos.
Ensinando a Rede a Pensar em Cubos
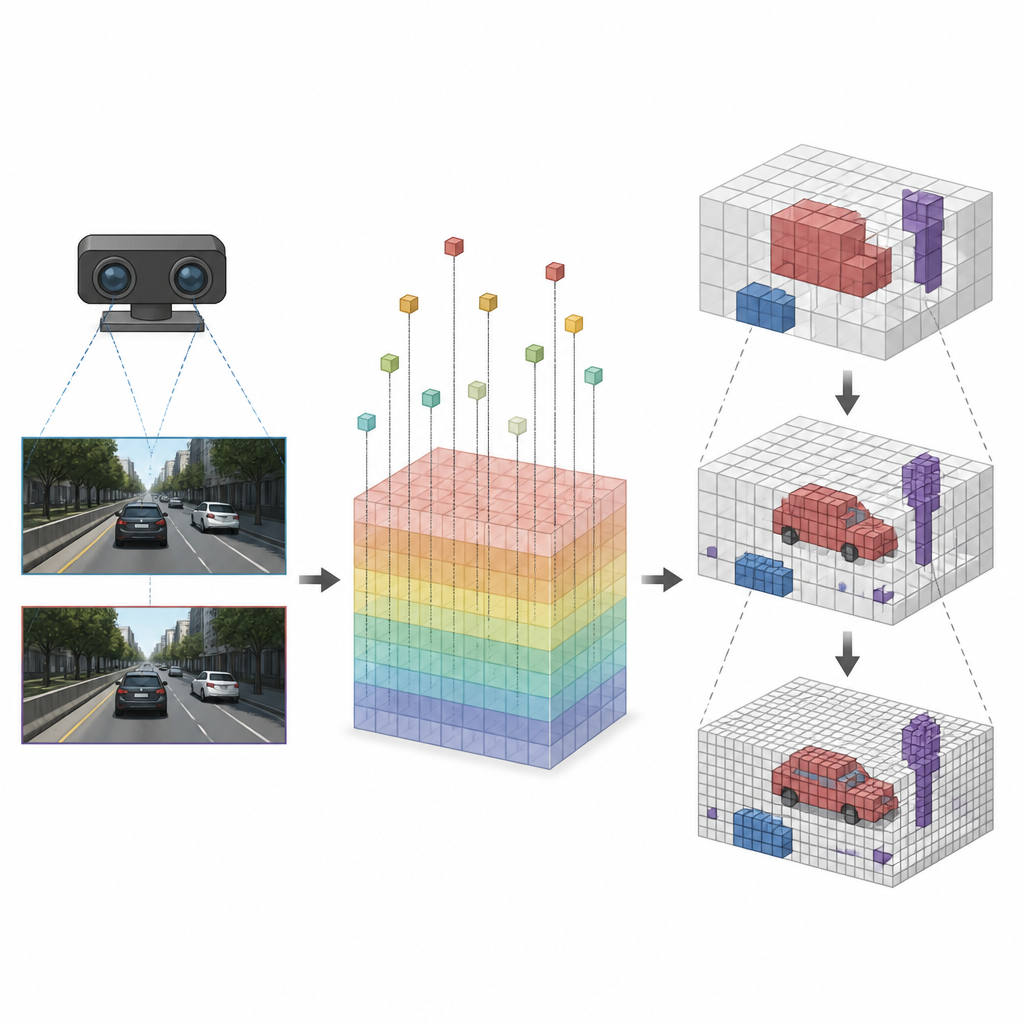
Os pesquisadores representam a área à frente de um veículo como uma pilha de cubos uniformes que formam juntos uma grade 3D. Em vez de começar pelos pixels e empurrá-los para o espaço, o Módulo de Projeção Pixel-Voxel deles inicia de cada cubo e pergunta onde ele apareceria nas imagens da câmera. Usando a geometria conhecida das câmeras estéreo, o módulo projeta cada cubo de volta nas duas imagens e amostra os ricos recursos internos que redes estéreo modernas calculam. Isso transforma informação densa da imagem em um sinal 3D esparso vinculado diretamente a cada cubo, cortando trabalho inútil em regiões vazias e reduzindo o desfoque de borda que causa falsos positivos.
Concentrando Detalhe Onde Importa
Uma vez que cada cubo foi ligado aos recursos de imagem corretos, o SVRS aplica uma Arquitetura Codificador-Decodificador baseada em Octree para decidir quais cubos estão ocupados. A ideia é começar com uma visão grosseira da cena e então refiná‑la passo a passo. Em cada nível, a rede prevê quais cubos grandes contêm algo e usa essa informação para guiar o próximo nível mais fino, onde somente regiões promissoras são examinadas em detalhe. Áreas vazias são suprimidas cedo para que não sobrecarreguem a rede enquanto ela dá zoom. Essa estratégia do grosseiro ao fino mantém os cálculos focados em carros, bordas da pista e outros objetos importantes, em vez de desperdiçar esforço no ar livre.
Aprendizado a Partir de Sensores Existentes Sem Rótulos Manuais
Para treinar o sistema, os autores evitam a tarefa custosa de rotular cenas 3D manualmente. Em vez disso, eles usam mapas de profundidade e nuvens de pontos produzidos por métodos estéreo e baseados em laser já consolidado como sinais de ensino. Eles limpam a profundidade estéreo com um detector simples de bordas antes de convertê‑la em uma grade 3D, e também experimentam treinar diretamente contra medições a laser. Essa configuração auto‑supervisionada permite que a rede imite dados 3D de alta qualidade enquanto ainda é muito mais leve e rápida em tempo de execução, tornando‑a prática para computadores embarcados em veículos.
Visões 3D Mais Rápidas e Mais Limpas para Máquinas em Movimento
Testes em um grande conjunto de dados de direção mostram que o SVRS reconstrói grades 3D com a mesma precisão que métodos estéreo de ponta enquanto roda até catorze vezes mais rápido que algumas linhas de base fortes e cerca de três vezes mais rápido que outros sistemas em tempo real. Ele faz menos afirmações falsas de que espaço vazio está ocupado, embora possa perder alguns objetos pequenos, refletindo um equilíbrio entre cautela e completude. Para um leitor leigo, a mensagem chave é que o método ajuda máquinas a transformar imagens de câmera em uma imagem 3D da estrada à frente mais clara e eficiente, um passo importante rumo a veículos autônomos e robôs mais seguros e capazes.
Citação: Zou, Z., Wu, Y., Zhang, H. et al. SVRS: self-supervised 3D voxel reconstruction network from stereo vision. Sci Rep 16, 15548 (2026). https://doi.org/10.1038/s41598-026-45924-0
Palavras-chave: visão estéreo, reconstrução 3D, grade de voxels, direção autônoma, percepção robótica