Clear Sky Science · sv
SVRS: självövervakade 3D-voxelrekonstruktionsnätverk från stereovision
Att se världen i 3D för säkrare robotar
Självkörande bilar och service‑robotar måste förstå form och rum kring sig i tre dimensioner för att undvika kollisioner och navigera säkert. Denna studie introducerar ett snabbare och mer precist sätt att omvandla par av vanliga kamerabilder till en detaljerad 3D-rutnätskarta över närliggande objekt, vilket kan göra framtida robotar mer tillförlitliga utan behov av dyra lasersensorer.
Från platta bilder till solid volym
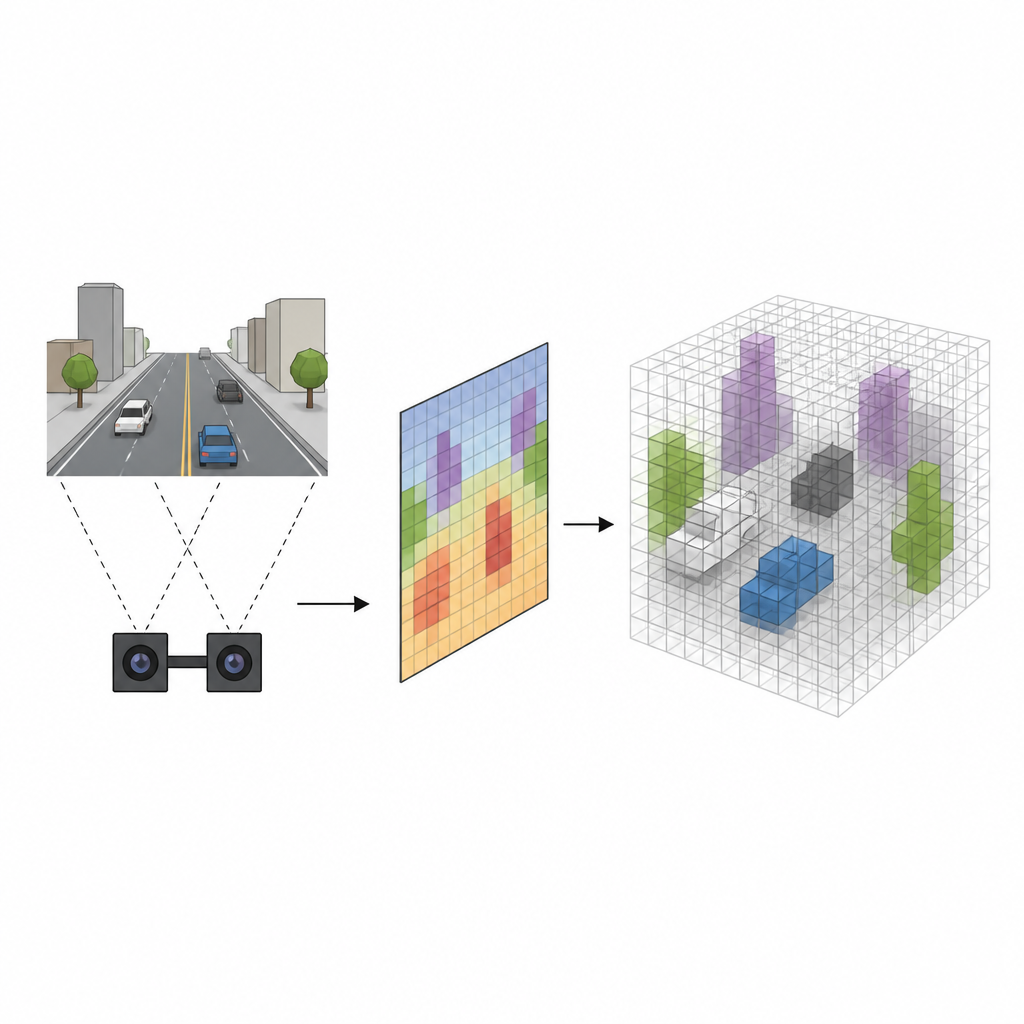
Många robotar använder stereokameror som ser en scen från två något olika vinklar, ungefär som våra ögon. Traditionella system uppskattar först avståndet för varje pixel från kameran och projicerar sedan varje pixel in i 3D‑rymden och fyller ett rutnät av små kuber kallade voxlar som markerar var objekt kan finnas. Även om denna metod fungerar är den långsam och tenderar att sudda ut objektens kanter, vilket skapar falska larm där tomrum felaktigt markeras som upptaget. Den nya metoden, kallad SVRS, hoppar över denna tunga pixel‑för‑pixel‑projektion och lär sig istället en mer direkt koppling mellan vad kamerorna ser och vilka kuber i rymden som faktiskt är fyllda.
Att lära nätverket tänka i kuber
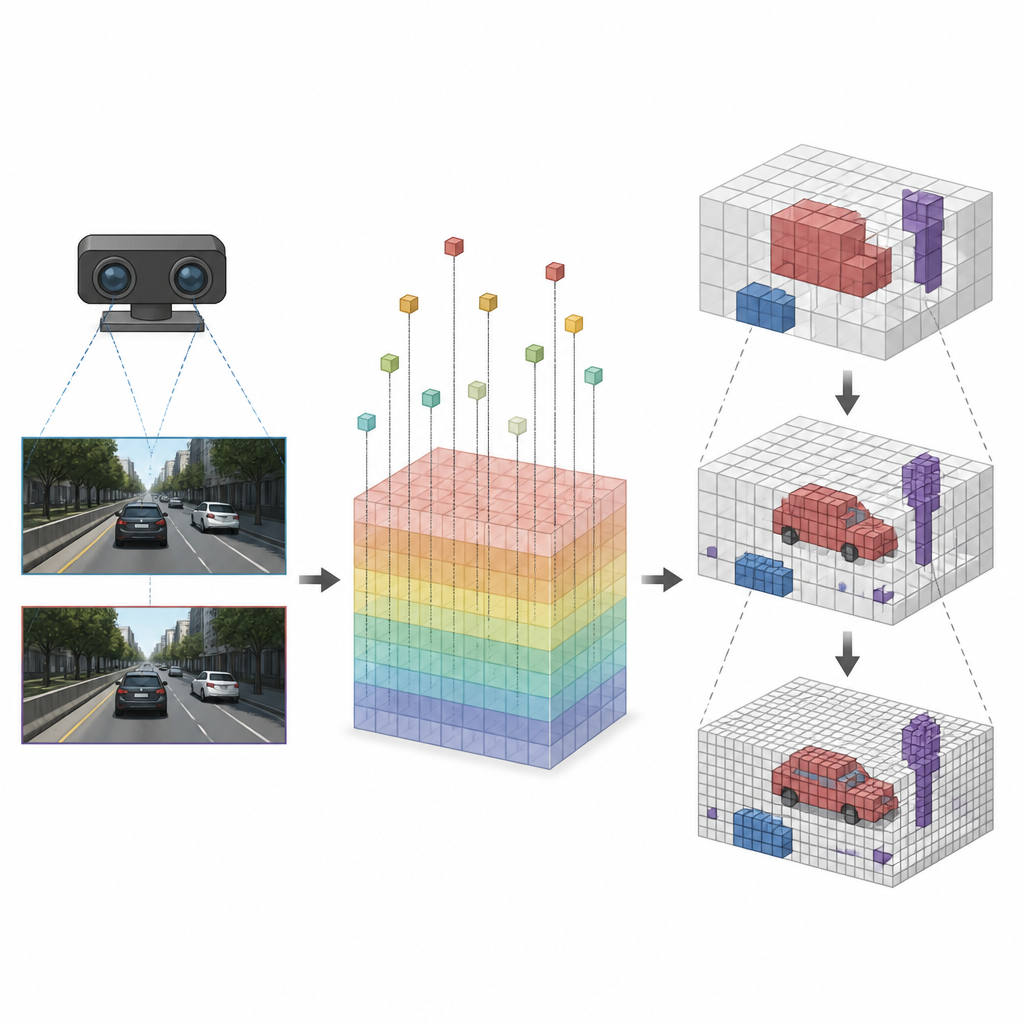
Forskarna representerar området framför ett fordon som en stapel av enhetliga kuber som tillsammans bildar ett 3D‑rutnät. Istället för att börja från pixlar och trycka dem ut i rymden frågar deras Pixel Voxel Projecting Module varje kub var den skulle dyka upp i kamerabilderna. Med hjälp av den kända geometrin för stereokamerorna projicerar modulen varje kub tillbaka till de två bilderna och samplar de rika interna funktioner som moderna stereonätverk beräknar. Detta förvandlar tät bildinformation till en gles 3D‑signal knuten direkt till varje kub, vilket sparar onödigt arbete i tomma regioner och minskar det kant‑sudd som ger upphov till falska positiva.
Fokusera detalj där det spelar roll
När varje kub har kopplats till rätt bildfunktioner tillämpar SVRS en oktalträd‑baserad encoder‑decoder‑arkitektur för att avgöra vilka kuber som är upptagna. Idén är att börja med en grov vy av scenen och sedan förfina den steg för steg. På varje nivå förutser nätverket vilka stora kuber som innehåller något och använder den informationen för att styra nästa, finare nivå där endast lovande regioner undersöks i detalj. Tomma områden undertrycks tidigt så att de inte överväldigar nätverket när det zoomar in. Denna grov‑till‑fin strategi håller beräkningarna fokuserade på bilar, vägkanter och andra viktiga objekt i stället för att slösa kraft på öppen luft.
Lära från befintliga sensorer utan manuella etiketter
För att träna systemet undviker författarna den kostsamma uppgiften att manuellt märka 3D‑scener. Istället använder de djupkartor och punktmoln som produceras av starka befintliga stereo‑ och laserbaserade metoder som undervisningssignaler. De rengör stereodjup med en enkel kantdetektor innan de omvandlar det till ett 3D‑rutnät, och de experimenterar också med att träna direkt mot laseruppmätningar. Denna självövervakade uppställning låter nätverket imitera högkvalitativa 3D‑data samtidigt som det blir mycket lättare och snabbare i drift, vilket gör det praktiskt för inbyggda datorer i fordon.
Snabbare och renare 3D‑vyer för rörliga maskiner
Tester på ett stort kördataset visar att SVRS rekonstruerar 3D‑rutnät lika precist som ledande stereobaserade metoder samtidigt som det kör upp till fjorton gånger snabbare än vissa starka baslinjer och ungefär tre gånger snabbare än andra realtidsystem. Det gör färre felaktiga påståenden om att tomrum är upptaget, även om det kan missa några små objekt — en avvägning mellan försiktighet och fullständighet. För en allmän läsare är huvudbudskapet att metoden hjälper maskiner att omvandla kamerabilder till en klarare, mer effektiv 3D‑bild av vägen framför, vilket är ett viktigt steg mot säkrare och mer kapabla autonoma fordon och robotar.
Citering: Zou, Z., Wu, Y., Zhang, H. et al. SVRS: self-supervised 3D voxel reconstruction network from stereo vision. Sci Rep 16, 15548 (2026). https://doi.org/10.1038/s41598-026-45924-0
Nyckelord: stereovision, 3D-rekonstruktion, voxelrutnät, självkörande fordon, robotperception